CIP-2021 : G06T 7/00 : Análisis de imagen.
CIP-2021 › G › G06 › G06T › G06T 7/00[m] › Análisis de imagen.
G06T 7/10 · Segmentación; Detección de bordes (segmentación basada en el movimiento G06T 7/215).
Notas[n] de G06T 7/10:
G06T 7/11 · · Segmentación basada en la región.
G06T 7/12 · · Segmentación basada en los bordes.
G06T 7/13 · · Detección de bordes.
G06T 7/136 · · que utiliza umbralización.
G06T 7/143 · · que utiliza aproximaciones probabilísticas, p.ej. modelo de campo aleatorio de Markov [MRF].
G06T 7/149 · · que utiliza modelos deformables, p. ej. modelos de contorno activo.
G06T 7/155 · · que utiliza operadores morfológicos.
G06T 7/162 · · que utiliza métodos basados en gráficos.
G06T 7/168 · · que utiliza métodos de transformación de dominio.
G06T 7/174 · · que implica la utilización de dos o más imágenes.
G06T 7/181 · · que implica crecimiento de borde; que implica enlace de borde.
G06T 7/187 · · que implica crecimiento de región; que implica fusión de región; que implica etiquetado de componentes conectados.
G06T 7/194 · · que implica la segmentación del primer plano.
G06T 7/20 · Análisis del movimiento (estimación del movimiento para codificación, decodificación, compresión o descompresión de señales de vídeo digitales H04N 19/43, H04N 19/51).
G06T 7/207 · · para la estimación del movimiento sobre una jerarquía de resoluciones (estimación del movimiento multi-resolución o estimación jerárquica del movimiento para la codificación, decodificación, compresión o descompresión de señales de vídeo digitales H04N 19/53).
G06T 7/215 · · Segmentación basada en el movimiento.
G06T 7/223 · · utilizando block-matching.
G06T 7/231 · · · utilizando búsqueda completa.
G06T 7/238 · · · utilizando búsqueda incompleta, p. ej. búsqueda en tres pasos.
G06T 7/246 · · utilizando métodos basados en características, p. ej. el seguimiento de esquinas o segmentos.
G06T 7/254 · · que emplea la sustracción de imágenes.
G06T 7/262 · · utilizando métodos de transformación de dominio, p. ej. métodos de dominio de Fourier.
G06T 7/269 · · utilizando métodos basados en gradientes.
G06T 7/277 · · que utiliza aproximaciones estocásticas, p. ej. utilizando filtros Kalman.
G06T 7/285 · · utilizando una secuencia de pares de imágenes estéreo.
G06T 7/292 · · Seguimiento multi-cámara.
G06T 7/30 · Determinación de parámetros de transformación para la alineación de imágenes, es decir, registro de imagen.
G06T 7/32 · · utilizando métodos basados en correlación.
G06T 7/33 · · utilizando métodos basados en características.
G06T 7/35 · · utilizando métodos estadísticos.
G06T 7/37 · · utilizando métodos de transformación de dominio.
G06T 7/38 · · Registro de secuencias de imagen.
G06T 7/40 · Análisis de la textura (recuperación de la profundidad o forma de la textura G06T 7/529).
G06T 7/41 · · basado en la descripción estadística de la textura.
G06T 7/42 · · · utilizando métodos de transformación de dominio.
G06T 7/44 · · · utilizando operadores de imagen, p. ej. filtros, indicadores de densidad de contorno o histogramas locales.
G06T 7/45 · · · utilizando cálculo matricial de co-ocurrencia.
G06T 7/46 · · · utilizando campos aleatorios.
G06T 7/48 · · · utilizando fractales.
G06T 7/49 · · basado en la descripción de la textura estructural, p.ej. utilizando primitivos o reglas de colocación.
G06T 7/50 · Recuperación de profundidad o forma.
G06T 7/507 · · a partir de sombreado (G06T 7/586 tiene prioridad).
G06T 7/514 · · a partir de reflejos.
G06T 7/521 · · a partir de láser, p. ej. utilizando interferometría; a partir de la proyección de luz estructurada.
G06T 7/529 · · a partir de la textura.
G06T 7/536 · · a partir de efectos de perspectiva, p. ej. utilizando puntos de fuga.
G06T 7/543 · · a partir de dibujos de línea.
G06T 7/55 · · a partir de imágenes múltiples.
G06T 7/557 · · · a partir de campos de luz, p. ej. de las cámaras plenópticas.
G06T 7/564 · · · a partir de los contornos.
G06T 7/571 · · · a partir del foco.
G06T 7/579 · · · a partir del movimiento.
G06T 7/586 · · · a partir de múltiples fuentes de luz, p. ej. estéreo fotométrico.
G06T 7/593 · · · a partir de imágenes estéreo.
G06T 7/60 · Análisis de los atributos geométricos.
G06T 7/62 · · de la superficie, del perímetro, del diámetro o del volumen.
G06T 7/64 · · de la convexidad o la concavidad.
G06T 7/66 · · de los momentos de imagen o del centro de gravedad.
G06T 7/68 · · de simetría.
G06T 7/70 · Determinación de la posición o la orientación de objetos o cámaras (calibración de cámara G06T 7/80).
G06T 7/73 · · utilizando métodos basados en características.
G06T 7/77 · · utilizando métodos estadísticos.
G06T 7/80 · Análisis de imágenes capturadas para determinar parámetros de cámara intrínsecos o extrínsecos, p. ej. calibración de cámara.
G06T 7/90 · Determinación de las características de color.
CIP2021: Invenciones publicadas en esta sección.
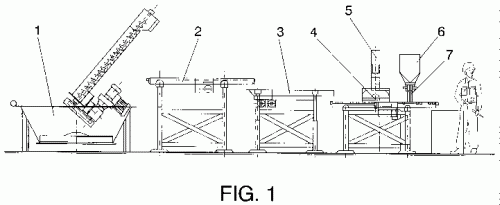
SISTEMA Y PROCEDIMIENTO PARA LA SEPARACION DE PARTICULAS POR MEDIOS OPTICOS.
(16/04/2004). Ver ilustración. Solicitante/s: FUNDACION ROBOTIKER. Inventor/es: GARCIA-TEJEDOR PEREZ,JAVIER, GUTIERREZ OLABARRIA,JOSE ANGEL, GARROTE CONTRERAS,ESTIBALIZ.
Sistema y procedimiento para la separación de partículas por métodos ópticos. El sistema comprende un equipo de iluminación indirecta, una estación de captación de imágenes lineal, un equipo de control que recibe las imágenes captadas por dicha estación de captación de imágenes lineal y las somete a un tratamiento informático para identificar las partículas a separar, y un equipo de extracción por succión de las partículas a separar. El procedimiento comprende la identificación de las partículas a separar, mediante métodos ópticos, y su extracción individualizada por succión. De aplicación en la separación de partículas contenidas en un material que contiene un material base y partículas a separar, por ejemplo, residuos que contienen un producto a reciclar e impurezas.
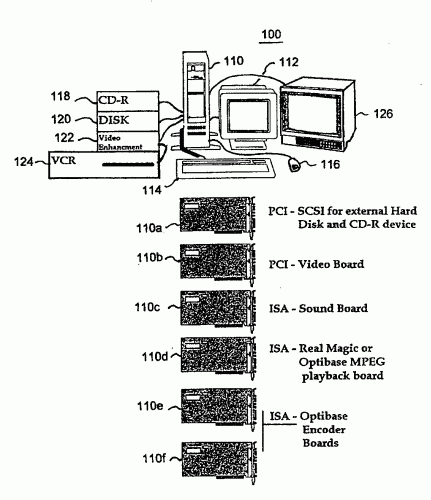
METODO PARA ACCEDER ALEATORIAMENTE A IMAGENES ALMACENADAS Y SISTEMA DE INSPECCION DE CAMPO QUE UTILIZA DICHO METODO.
(16/03/2004). Ver ilustración. Solicitante/s: PENINSULAR TECHNOLOGIES, LLC. Inventor/es: VAN DEN BOSCH, JEFFREY, A.
LA PRESENTE INVENCION ESTA RELACIONADA CON UN SISTEMA DE INSPECCION DE CAMPO PARA COMPRIMIR SEÑALES DE VIDEO RECIBIDAS A PARTIR DE UNA CAMARA DE VIDEO DE INSPECCION DE CAMPO EN DATOS DE VIDEO COMPRIMIDOS PARA GRABAR DATOS DE VIDEO COMPRIMIDOS EN UN DISCO COMPACTO JUNTO CON UNA HOJA DE REGISTRO ELECTRONICO. LA HOJA DE REGISTRO ELECTRONICO CONTIENE UNA LISTA DE DEFECTOS O ANOMALIAS SOSPECHADOS Y PUNTEROS ASOCIADOS A CUADROS DE REFERENCIA EN LOS DATOS DE VIDEO COMPRIMIDOS. LA HOJA DE REGISTRO ELECTRONICO PUEDE VISUALIZARSE Y UN OPERADOR PUEDE ACCEDER A UNA PORCION DEL VIDEO DE INSPECCION DE CAMPO QUE MUESTRA UN DEFECTO DE LA LISTA HACIENDO CLIC CON EL BOTON DEL RATON CUANDO UN ICONO INDICADOR ES POSICIONADO EN EL DEFECTO DE LA LISTA. PARA REALIZAR ESTA TAREA, LA PRESENTE INVENCION UTILIZA UNA TECNICA PARA ACCEDER DE FORMA ALEATORIA A LOS DATOS DE VIDEO COMPRIMIDOS EN LOS QUE LOS CUADROS DE REFERENCIA INCLUIDOS EN ELLOS SON UTILIZADOS COMO PUNTOS DE ACCESO A LAS SECUENCIAS DEL VIDEO.
APARATO Y METODO DE TRATAMIENTO DE IMAGENES.
(16/06/2003) Procedimiento para identificar una línea en una imagen de entrada, comprendiendo la imagen una pluralidad de pixels correspondientes a la línea, incluyendo el procedimiento una operación elemental que comprende: proyectar pixels sobre un eje de proyección definido por un ángulo de rotación relacionado con un eje de referencia, con el fin de formar una forma de onda de proyección; analizar la forma de onda de proyección para identificar las características indicativas de una línea; la imagen se procesa con el fin de seleccionar los pixels de la imagen que tengan características correspondientes a las características…
PROCEDIMIENTO PARA LA DETECCION DE OBJETOS DENTRO DEL ENTORNO DE UN VEHICULO DE CARRETERA HASTA A UNA GRAN DISTANCIA.
(16/06/2003) Procedimiento para la detección de objetos dentro del entorno de un vehículo de carretera hasta a una gran distancia, según el cual la distancia de un vehículo en marcha o de un vehículo parado, en relación con uno o con varios objetos, es calculada por una segmentación de imágenes - basada en la distancia - por medio de técnicas estereoscópicas de la imagen, y las propiedades de los objetos detectados son determinadas mediante el reconocimiento del objeto dentro de las zonas segmentadas de la imagen; a este efecto, son determinadas las zonas de imágenes de los objetos de relieve y/o de los objetos planos ; los objetos de relieve y/o los objetos planos son detectados mediante una aglomeración…
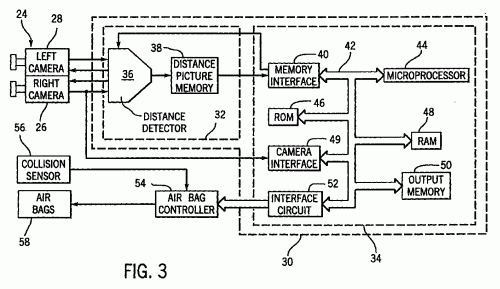
APARATO PARA DETECTAR LA PRESENCIA DE UN OCUPANTE EN UN VEHICULO A MOTOR.
(01/05/2003). Ver ilustración. Solicitante/s: EATON CORPORATION. Inventor/es: SIMON, MARC RAYMOND, MATTHIES, LARRY, JANUTKA, WILLIAM JOSEPH, KEMENY, SABRINA ELIZABETH.
UN SISTEMA DE CONTROL DE UN VEHICULO DE MOTOR INCLUYE UN PAR DE CAMARAS PARA PRODUCIR PRIMERAS Y SEGUNDAS IMAGENES DE UN AREA DE PASAJEROS. UN PROCESADOR DE DISTANCIAS DETERMINA LAS DISTANCIAS A LAS QUE SE ENCUENTRAN DE LAS CAMARAS UNA SERIE DE CARACTERISTICAS EN LAS PRIMERAS Y LAS SEGUNDAS IMAGENES, BASANDOSE EN CUANTO CAMBIA CADA CARACTERISTICA ENTRE LAS PRIMERAS Y LAS SEGUNDAS IMAGENES. UN ANALIZADOR PROCESA LAS DISTANCIAS Y DETERMINA EL TAMAÑO DE UN OBJETO EN EL ASIENTO. ANALISIS ADICIONALES DE LA DISTANCIA TAMBIEN PUEDEN DETERMINAR EL MOVIMIENTO DEL OBJETO Y LA VELOCIDAD DEL MOVIMIENTO. LA INFORMACION SOBRE LA DISTANCIA TAMBIEN PUEDE UTILIZARSE PARA RECONOCER MODELOS PREDEFINIDOS EN LAS IMAGENES E IDENTIFICAR ASI EL OBJETO. UN MECANISMO UTILIZA LAS CARACTERISTICAS DEL OBJETO DETERMINADAS EN LA OPERACION DE CONTROL DE UN DISPOSITIVO, COMO EL DESPLIEGUE DE UN AIRBAG.
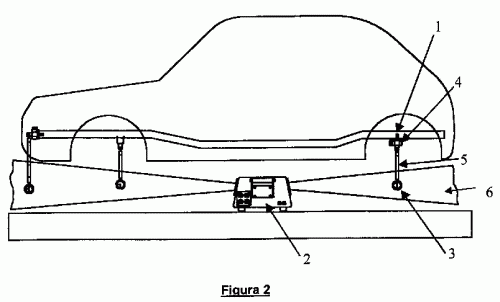
SISTEMA OPTICO DE MEDIDA DE CHASIS DE VEHICULOS.
(01/04/2003). Ver ilustración. Solicitante/s: UNIVERSIDAD DE ZARAGOZA.. Inventor/es: AGUILAR MARTIN,JUAN JOSE, LOPEZ DOMINGO,MIGUEL ANGEL.
El sistema óptico de medida de chasis de vehículos permite medir cotas geométricas de vehículo a partir de puntos característicos del bastidor, mediante visión estereoscópica móvil. El sistema consta de un instrumento de medida , de varias dianas de medición y elementos auxiliares como enganches y alargadores . El instrumento de medición es una estructura alargada rígida y ligera. Incluye dos cámaras de video en sus extremos, solidarias a un foco y movidas por motores que les confieren un grado de libertad giratorio. En cada punto a medir se cuelga una diana de forma que se posicione dentro del campo de visión del instrumento. Para ello se utiliza un enganche y unos alargadores. El instrumento medirá la posición espacial del centro de las dianas reflectantes, con lo que calculará la posición espacial de los puntos del bastidor y posteriormente las cotas del vehículo.
APARATO DE INSPECCION DE PROCESAMIENTO DE IMAGENES.
(16/11/2002) Un aparato de inspección de procesamiento de imágenes, que consta de: una cámara de TV ; una tarjeta de procesamiento de imágenes (11A), conectada a dicha cámara de TV , que dispone de una memoria de captación de imágenes para almacenar una imagen captada por dicha cámara de TV y un medio de procesamiento de imágenes; un dispositivo de control de procesamiento central (1A) que dispone de un bus de extensión (5A) al que se conecta dicha tarjeta de procesamiento de imágenes (11A), una CPU principal y una memoria principal ; y medios de control del funcionamiento de la CPU para controlar de modo que…
SISTEMA Y METODO DE TOMOGRAFIA COMPUTERIZADA (CT) POR RAYOS X, PARA LADETECCION DE OBJETOS DELGADOS.
(16/10/2002). Solicitante/s: LOCKHEED MARTIN SPECIALITY COMPONENTS, INC. Inventor/es: EBERHARD, JEFFREY, WAYNE, HSIAO, MENG-LING.
SE DETERMINA LA PRESENCIA DE UN OBJETO POR LA REVISION CON RADIACION DE UN VOLUMEN TRIDIMENSIONAL PARA DETERMINAR UNA PROPIEDAD DE UNOS ELEMENTOS DE IMAGENES VOLUMETRICAS QUE REPRESENTAN EL VOLUMEN (S1), IDENTIFICAN LOS ELEMENTOS DE IMAGENES VOLUMETRICAS QUE TIENEN UNO VALORES SIMILARES DE LA PROPIEDAD (S2), E IDENTIFICAN LOS GRUPOS CONTIGUOS DE ELEMENTOS DE IMAGENES VOLUMETRICAS SIMILARES (S3). DESPUES, UN GRUPO CONTIGUO DE XXX ES IDENTIFICADO COMO EL QUE CONTIENE EL OBJETO SI UNA CARACTERISTICA, COMO, POR EJEMPLO, LA MASA (S7) Y/O EL VOLUMEN (S5) DEL GRUPO CONTIGUO, TIENE UN VALOR PREDETERMINADO.
MEDICION OPTICA TRIDIMENSIONAL CON VARIOS PUNTOS DE APROXIMACION.
(16/10/2002) Procedimiento para la medición óptica tridimensional de superficies de objetos, en el que se proyectan dibujos de muestra sobre la superficie del objeto y se determinan las coordenadas espaciales de puntos de medición sobre la superficie del objeto, utilizando un análisis de similitud de los recorridos de los valores acromáticos en las imágenes de la superficie del objeto tomadas por al menos dos cámaras matrices, en el que: a) cada una de las cámaras matrices proporciona en forma ya de por sí conocida una secuencia de N imágenes consecutivas entre sí en el tiempo, desplazándose y/o girando entre las tomas fotográficas de las imágenes el dibujo de muestra proyectado, con valores predeterminados, y/o modificándose la estructura del dibujo…
APARATO PARA LA DETECCION OPTICA DE MULTIPLES OBJETOS EN UNA PLATAFORMA.
(16/07/2002). Solicitante/s: MINNESOTA MINING AND MANUFACTURING COMPANY. Inventor/es: NELSON, JOHN, E., BRACE, THOMAS, J., ZAREMBO, PETER, J., BELKA, ANTHONY, M., JESME, RONALD, D., TAO, SAMUEL, H.
Un aparato para detectar la presencia de múltiples objetos en una plataforma estacionaria con respecto al aparato de detección, comprendiendo el aparato: (a) una fuente de luz para iluminar un perfil de borde unidimensional de objetos en la plataforma; (b) un detector espaciado de la fuente de luz y posicionado con respecto a la plataforma para recibir una imagen bidimensional del perfil de borde; y (c) un generador de señal para proporcionar una señal que corresponde al perfil borde unidimensional, en el que las desviaciones de la señal que exceden un valor predeterminado son indicativas de múltiples objetos en la plataforma.
METODOS Y APARATOS PARA INSPECCIONAR LA APARIENCIA DE OBJETOS ESENCIALMENTE CIRCULARES.
(16/05/2002). Solicitante/s: PHILIP MORRIS PRODUCTS INC.. Inventor/es: LONGEST, H. CARY, LYNCH, JAMES L.
OBJETOS SUSTANCIALMENTE CIRCULARES TALES COMO LOS EXTREMOS DE LOS FILTROS O CIGARRILLOS CON BOQUILLA DE FILTRO, SE INSPECCIONAN PARA COMPROBAR SU APARIENCIA ACEPTABLE UTILIZANDO UN ANALISIS DE BURBUJA QUE INCLUYE REPRODUCIR UNA IMAGEN DE LA REGION PERIFERICA PARA PROPORCIONAR UNA RESOLUCION A LO LARGO DEL BORDE DEL OBJETO CIRCULAR.
DISPOSITIVO DE DETECCION DE PRESENCIA DE OBJETOS.
(16/03/2002). Ver ilustración. Solicitante/s: FICO MIRRORS S.A.. Inventor/es: SARTORI, ALVISE, TECCHIOLLI, GIAMPIETRO, TARRAGO PUJOL, JOSE MARIA, DAURA LUNA, FRANCESC, BANDE MARTINEZ, DANIEL, CRESPO,BRUNO.
Dispositivo de detección de presencia de objetos, del tipo que van montados en un vehículo automóvil, que presenta por lo menos un ángulo muerto, donde el dispositivo de detección es apto para detectar un objeto situado en el ángulo muerto y comprende: un receptor apto para detectar unas ondas electromagnéticas, con un dispositivo focalizador, y un fotosensor que transforma dichas ondas electromagnéticas recibidas en unas señales eléctricas, un circuito electrónico que transforma las señales eléctricas en unas señales digitalizadas, un circuito lógico que analiza las señales digitalizadas para analizar la presencia de objetos en el ángulo muerto con un movimiento relativo respecto de dicho vehículo, y que emite unas señales de salida variables en función del resultado del análisis, [d] unos elementos indicadores, activados mediante las señales de salida, aptos para ser percibidos por el conductor.
SISTEMA MULTIATENCIONAL ADAPTATIVO DE ESTRUCTURA MULTIRRESOLUCION RECONFIGURABLE.
(16/08/2001) Sistema multiatencional adaptativo de estructura multirresolución reconfigurable, cuyo objeto es reducir el número de datos analizables en secuencias de imágenes, para acortar los tiempos de procesamiento. Consiste en una estructura de datos tridimensionales, representando imágenes con resoluciones decrecientes. Determinando zonas de interés en imágenes con resolución reducida se seleccionan adaptativamente regiones correspondientes de alta resolución y los gradientes de resolución circundantes, obteniéndose estructuras bidimensionales que representan imágenes multifoveales. Aplicado en sistemas de visión artificial permite procesar las zonas relevantes de imágenes, analizando sus características en tiempo real y reduciendo tiempos dedicados al resto, donde se mantienen capacidades de detección. Las alternativas para implementarlo…
METODO DE ANALISIS DE COINCIDENCIAS DE IMAGENES MEDICAS Y/O DE MICROSCOPIA MEDIANTE COMBINACION DE FILTRADO DE HISTOGRAMAS E IDENTIFICACION HOLOGRAFICA.
(01/04/2001) Método de análisis de coincidencias de imágenes médicas y/o de microscopía mediante combinación de filtrado de histogramas e identificación holográfica. Método para el análisis de coincidencias de imágenes médicas y/o de microscopía mediante combinación de filtrado e identificación holográfica que permite cuantificar, de manera automatizada, el grado de coincidencia de la imagen de un elemento, estructura o lesión -de interpretación conocida- en cada punto o zona de otra imagen (obtenida por el mismo procedimiento). Este método comprende una cierta combinación de técnicas de filtrado de histogramas con un proceso de filtrado…
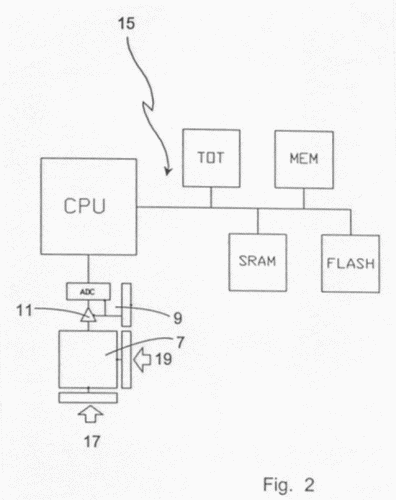
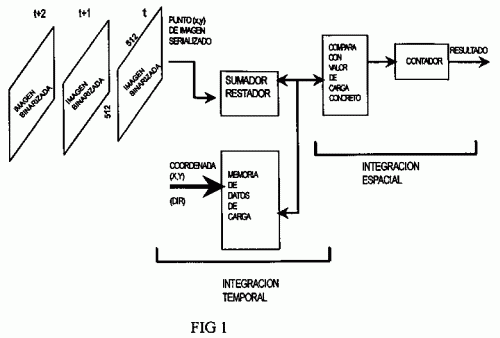
SISTEMA DE COMPUTACION PARA LA REALIZACION DE ACUMULACION ESPACIO-TEMPORAL DE ACTIVACION EN SEÑALES DIGITALES.
(16/08/2000). Ver ilustración. Solicitante/s: UNIVERSIDAD DE CASTILLA LA MANCHA UNIVERSIDAD NACIONAL DE EDUCACION A DISTANCIA.
En algunos algoritmos de computación, es necesario calcular el período de tiempo que una determinada señal digital permanece activa o el tiempo que hace que dejó de estarlo. Este cálculo es utilizado entre otros casos en el análisis de movimiento en secuencias de imagen y requiere la integración espacio-temporal de este tipo de señales. Esta invención consiste en un sistema capaz de ejecutar este tipo de cálculos en tiempo real. El sistema está basado en la serialización de los datos de entrada, la utilización de un solo sumador para todo el espacio de entrada y el almacenamiento de los datos de carga en una memoria de acceso aleatorio. Tras esta circuitería se pospone un comparador y un contador que es incrementado o no según el resultado del comparador a cada punto de imagen y puesto a cero después de cada fotograma. Puede verse un esquema del sistema en la figura 1.
PROCEDIMIENTO PARA LA DETECCION AUTOMATICA DE OBJETOS FIJOS O MOVILES EN UN ENTORNO NATURAL DE UNA SECUENCIA DE IMAGENES EN TIEMPO REAL.
(01/07/2000). Solicitante/s: LFK LENKFLUGKORPERSYSTEME GMBH. Inventor/es: KIESLICH, WOLFGANG, ING.-GRAD., NAHAPETIAN, VAHE, DIPL.-ING., NIEDERHOFER, KARL-HEINZ, DR.-ING.
LA INVENCION SE REFIERE A UN PROCEDIMIENTO Y UNA DISPOSICION DE CIRCUITO PARA LA DETECCION AUTOMATICA DE OBJETOS FIJOS O MOVILES EN AMBIENTE NATURAL DE UNA SUCESION DE IMAGENES DE TIEMPO REAL BAJO LA UTILIZACION DE UN SENSOR ELECTROOPTICO QUE EXPLORA EL AMBIENTE Y UNA UNIDAD DE ANALISIS CONECTADA A CONTINUACION, ASI COMO HABIENDOSE PREVISTO EVENTUALMENTE UN EQUIPO DE REPRESENTACION DE IMAGEN. POR MEDIO DE UNA SERIE DE ETAPAS DEL PROCEDIMIENTO O DE MEDIDAS TECNICAS DE CONEXION SE ELABORA LA MAYOR INFORMACION POSIBLE A PARTIR DE LAS IMAGENES DIGITALES, DE TAL MODO QUE ES POSIBLE TAMBIEN LA DETECCION DE OBJETOS MAYORES.
SISTEMA Y METODO DE RED NEURAL PARA ESTIMACION DE POSICION Y ORIENTACION.
(01/07/2000) UN SISTEMA PARA DETERMINAR LA ACTITUD (TRANSLACION, ROTACION Y ESCALA), O POSICION Y ORIENTACION, DE UN OBJETO MODELO QUE MEJOR COINCIDA CON UN OBJETO OBJETIVO DISPUESTO EN UN DATO DE IMAGEN . HACE ESTO MEDIANTE UN PROCESO ITERATIVO REALIZANDO PEQUEÑOS AJUSTES RELATIVOS A LA POSICION Y ORIENTACION ORIGINALES DEL OBJETO MODELO HASTA QUE CONVERJA CON EL ESTADO QUE MEJOR COINCIDA CON EL OBJETO OBJETIVO QUE SE ENCUENTRA EN EL DATO DE IMAGEN . EL SISTEMA CONSTA DE UN DETECTOR DE BORDES PARA PROCESAR LA IMAGEN DIGITALIZADA Y PRODUCIR DATOS SOBRE LOS BORDES REPRESENTATIVOS DE LOS BORDES DEL OBJETO OBJETIVO . HAY UNA MEMORIA PARA MODELOS PARA ALMACENAR LOS DATOS DE MODELOS CORRESPONDIENTES…
PROCEDIMIENTO DE RECONOCIMIENTO DE OBJETOS.
(01/06/2000) SE DESCRIBE UN METODO PARA IDENTIFICAR LA POSICION Y ORIENTACION DE UN ARTICULO, EL METODO COMPRENDE LOS PASOS DE: OBTENER UNA IMAGEN DEL ARTICULO CON EL ARTICULO EN UNA POSICION Y ORIENTACION CONOCIDAS RESPECTO A UNA CAMARA; OBTENER UNA MATRIZ DE LOS BORDES DE LA PLANTILLA X E Y A PARTIR DE LA IMAGEN DEL ARTICULO; CREAR UNA PLURALIDAD DE CONJUNTOS DE MATRICES DE LOS BORDES DE PLANTILLAS MODIFICADAS, CADA UNO DE LOS CONJUNTOS DE MATRICES DE BORDES DE PLANTILLAS MODIFICADAS ES UNA MATRIZ DE LOS BORDES DE LA PLANTILLA X E Y CON EL ARTICULO EN UNA ORIENTACION DIFERENTE; CAPTURAR UNA IMAGEN VISUAL DIGITAL CONTENIENDO EL ARTICULO, LA IMAGEN DIGITAL ES UNA MATRIZ DE PIXELES; CREAR MATRICES DE LOS BORDES DEL ARTICULO X E Y A PARTIR…
APARATO PARA INSPECCIONAR PRODUCTOS.
(16/11/1999) SE DESCRIBE UNA ESTACION DE INSPECCION DE CALIDAD AUTOMATIZADA PARA EVALUAR LAS CARACTERISTICAS DE LOS COMPONENTES DEL COLOR DE UN PRODUCTO. LA ESTACION DE INSPECCION INCLUYE UNA CAMARA DE VIDEO EN COLOR, PARA CAPTURAR TOMAS DE VIDEO DE LAS IMAGENES DEL PRODUCTO, Y UN SISTEMA DE CONTROL PARA ANALIZAR ESAS TOMAS DE VIDEO. EL SISTEMA DE CONTROL ESTA PROGRAMADO PARA REALIZAR UNA CALIBRACION DE REFERENCIA Y POSTERIORMENTE UNA CALIBRACION DE LA MUESTRA. DURANTE LA CALIBRACION DE REFERENCIA UN OPERADOR IDENTIFICA LAS AREAS DEL TIPO DE COMPONENTE A PARTIR DE UNA TOMA DE REFERENCIA REPRESENTADA DE UN PRODUCTO TIPICO. EL SISTEMA DE CONTROL CALCULA LAS CURVAS DE DENSIDAD DEL VALOR DEL COLOR A PARTIR…
METODO Y APARATO PARA LA DETERMINACION OPTICA DE LA ACEPTABILIDAD DE PRODUCTOS.
(01/02/1999). Solicitante/s: PHILIP MORRIS PRODUCTS INC.. Inventor/es: COX, KENNETH A., DANTE, HENRY M., MAHER, ROBERT J.
LA ACEPTABILIDAD DE LA APARIENCIA DE LOS OBJETOS , TALES COMO PRODUCTOS PARA EL CONSUMIDOR, ES DETERMINADA MEDIANTE LA FORMACION DE UNA FUNCION DISCRIMINANTE INICIAL (F) COMO UN COMPUESTO DE UN RELATIVAMENTE PEQUEÑO NUMERO DE IMAGENES (I), LAS CUALES SON CONOCIDAS POR SER ACEPTABLES. ESTA FUNCION DISCRIMINANTE INICIAL ES PUES UTILIZADA PARA AGRUPAR LA INFORMACION ESTADISTICA (P, A, B, C) ACERCA DE COMO UN PRIMER NUMERO RELATIVAMENTE GRANDE DE IMAGENES SE COMPARA CON LA FUNCION DISCRIMINANTE INICIAL. DESPUES DE ESTO, ESTA INFORMACION ESTADISTICA ES UTILIZADA PARA SELECCIONAR O AYUDAR EN LA SELECCION DE LAS IMAGENES ACEPTABLES A PARTIR DE UN SEGUNDO NUMERO RELATIVAMENTE GRANDE DE IMAGENES , Y LAS IMAGENES SELECCIONADAS COMO ACEPTABLES SON UTILIZADAS PARA AFINAR LA FUNCION DISCRIMINANTE. LA FUNCION DISCRIMINANTE AFINADA ES ENTONCES UTILIZADA (E.J. DURANTE LA INSPECCION DEL PRODUCTO EXISTENTE ) PARA DETERMINAR QUE OBJETOS TIENEN UNA APARIENCIA ACEPTABLE Y CUALES NO.
PROCEDIMIENTO PARA ESTIMACION DE DISPARIDAD ENTRE LAS IMAGENES MONOSCOPICAS QUE CONSTITUYEN UNA IMAGEN ESTEREOSCOPICA.
(16/01/1999). Solicitante/s: THOMSON MULTIMEDIA. Inventor/es: CHUPEAU, BERTRAND.
LA INVENCION SE REFIERE A UN PROCESO DE ESTIMACION DE DISPARIDAD ENTRE LAS IMAGENES QUE CONSTITUYEN UNA IMAGEN ESTEREOSCOPICA. EL PROCESO CONSISTE: EN UNA PRIMERA ETAPA, EN REALIZAR UNA MISMA DESCOMPOSICION JERARQUICA DE CADA IMAGEN (ID(T), IG(T) MONOSCOPICA, POR NIVELES DE RESOLUCION, CONSTITUYENDO AL MENOS TRES PIRAMIDES DE IMAGENES DE RESOLUCIONES CRECIENTES, UNA PIRAMIDE DE IMAGENES DE BAJA FRECUENCIA Y DOS PIRAMIDES DE IMAGENES DE LATA FRECUENCIA SEGUN LAS DIRECCIONES HORIZONTAL Y VERTICAL DE LA IMAGENES; EN UNA SEGUNDA ETAPA, EN ESTIMAR UNA DISPARIDAD (D) AL NIVEL DE RESOLUCION MAS BASTO Y EN AFINAR LA ESTIMACION EN CADA NIVEL A MEDIDA QUE LA RESOLUCION AUMENTA. APLICACION: TRATAMIENTO DE EFECTOS ESPECIALES DE IMAGENES ESTEREOSCOPICAS.
SISTEMA BASADO EN VIDEO PARA CIRUGIA Y LOCALIZACION ASISTIDA POR ORDENADOR.
(01/10/1998). Solicitante/s: ROKE MANOR RESEARCH LIMITED UNITED MEDICAL AND DENTAL SCHOOLS GUY'S HOSPITAL. Inventor/es: EVANS, RICHARD JOHN, HARRIS, CHRISTOPHER-GEORGE, COLCHESTER, ALAN CHARLES FRANCIS.
EL APARATO COMPRENDE CAMARAS DE VIDEO PARA VER PARTE DEL CUERPO DE UN PACIENTE Y UN PROYECTOR DE DIAPOSITIVAS PARA PROYECTAR UN MODELO PREDETERMINADO DE LUZ EN EL CUERPO DEL PACIENTE QUE ES VISTO POR LAS CAMARAS. UNA ESTACION DE TRABAJO Y UNA GRABADORA DE IMAGENES DE VIDEO LLEVAN A CABO LAS FUNCIONES DE CONTROL Y PROCESAMIENTO Y ESTAN DISPUESTAS PARA PROCESAR DICHAS IMAGENES DE LAS CAMARAS UTILIZANDO ALGORITMOS DE PROCESAMIENTO DE IMAGEN. LAS IMAGENES DE LAS CAMARAS SON SUPERPUESTAS SOBRE IMAGENES PREALMACENADAS QUE SE GENERAN A PARTIR DE RAYOS X O EXPLORACIONES CT. UN SEÑALADOR PASIVO, QUE TIENE EN EL MISMO UN MODELO PREDETERMINADO QUE ES RECONOCIBLE POR EL ELEMENTO DE CONTROL Y PROCESAMIENTO ES UTILIZADO POR EL CIRUJANO. EL MODELO SE UTILIZA PARA IDENTIFICAR LA POSICION EXACTA DE UN EXTREMO DEL SEÑALADOR EN RELACION AL CUERPO DEL PACIENTE Y SE VISUALIZA EN UN MONITOR CON LAS IMAGENES SUPERPUESTAS.
PROCEDIMIENTO DINAMICO PARA LA IDENTIFICACION DE OBJETOS Y SISTEMA DEPROCESADO DE IMAGENES PARA EL MISMO.
(16/07/1998) SE EXAMINA UNA SERIE EN TIEMPO DE CUADROS SUCESIVOS DE RESOLUCION RELATIVAMENTE ALTA DE IMAGENES DE DATOS, CUALQUIERA DE CUYOS CUADROS PUEDE O NO INCLUIR UNA REPRESENTACION GRAFICA DE UNO O MAS MIEMBROS ESPECIFICOS PREDETERMINADOS (V. GR. PERSONAS PARTICULARES CONOCIDAS) DE UNA CLASE GENERICA DADA (V. GR. SERES HUMANOS) CON EL OBJETO DE RECONOCER LA IDENTIDAD DE UN MIEMBRO ESPECIFICO SI LA IMAGEN DE TAL MIEMBRO ESTA INCLUIDA EN LA SERIE DE TIEMPOS. LOS CUADROS DE DATOS DE IMAGEN SE PUEDEN EXAMINAR EN TIEMPO REAL A DISTINTAS RESOLUCIONES, COMENZANDO CON UNA RESOLUCION RELATIVAMENTE BAJA, PARA DETECTAR SI ALGUN CUADRO DE PRODUCCION ANTERIOR INCLUYE ALGUNA DE UN GRUPO DE CARACTERISTICAS DE IMAGEN POSEIDAS POR UNA IMAGEN DE UN MIEMBRO DE LA CLASE DADA. LA UBICACION DE LA IMAGEN DE UNA CARACTERISTICA DE IMAGEN…
PROCEDIMIENTO DE DETECCION AUTOMATICA DE LAS ZONAS EXAMINABLES EN IMAGENES DE PIEZAS MECANICAS.
(16/07/1998). Solicitante/s: SOCIETE NATIONALE D'ETUDE ET DE CONSTRUCTION DE MOTEURS D'AVIATION, "S.N.E.C.M.A.". Inventor/es: JOCHEMS, TILMAN, PREJEAN-LEFEVRE, VERONIQUE HELENE MARIE PIERRE.
EL PROCEDIMIENTO DE DETECCION AUTOMATICA DE LAS ZONAS EXAMINABLES EN UNA IMAGEN DE PIEZA MECANICA LLEVA UNA PRIMERA FASE DURANTE LA CUAL LAS ZONAS DE AL MENOS UNA IMAGEN DE REFERENCIA SON DETECTADAS MEDIANTE UNA SEGMENTACION MANUAL, UNA SEGUNDA FASE SEGUN LA CUAL UNOS PARAMETROS DE MARCADO DE LAS ZONAS ESTAN DEFINIDAS Y FIJADAS, SIENDO ESTOS PARAMETROS DE MARCADO TRANSFORMACIONES DE SIMPLIFICACION E INTERVALOS DE UMBRAL DE LAS IMAGENES DE REFERENCIA QUE PERMITEN OBTENER UNA CALIDAD OPTIMA DE SEPARACION DE LAS ZONAS, UNA TERCERA FASE ENTERAMENTE AUTOMATICA,DURANTE LA CUAL LOS PARAMETROS DE MARCADO DE LAS ZONAS DEFINIDOS Y FIJADOS DURANTE LAS DOS PRIMERAS FASES SE UTILIZAN PARA MARCAR LAS ZONAS DE NUEVAS IMAGENES.
METODO Y APARATO PARA DETERMINAR LA DISTRIBUCION DE UN CORDON DE CUERPO ESPESO.
(16/02/1998). Solicitante/s: BRIDGESTONE/FIRESTONE , INC.. Inventor/es: BYRNE, FRANCIS J.
SE DESCRIBE UN APARATO Y UNA TECNICA PARA DETERMINAR LA DISTRIBUCION DE UN CORDON DE CUERPO ESPESO EN UNA LAMINA DE TEJIDO CALANDRO. LAS BANDAS DE PRUEBA SE CORTAN DESDE LA LAMINA Y SE CONFORMAN EN UN RODILLO CON LOS CORDONES QUE SE EXTIENDEN PARALELOS AL EJE DEL RODILLO Y NORMALES AL EXTREMO DE LOS MISMOS. EL EXTREMO DEL RODILLO SE EXPONE ENTONCES A LUZ POLARIZADA, CON DIFERENCIAS DE INTENSIDAD DE ACENTUACION DE LUZ ENTRE EL AREA SECCIONAL DE CRUCE DE LOS CORDONES DE CORTE Y EL MATERIAL ELASTOMERICO EN EL CUAL SE EMPOTRAN. SE GENERA UNA IMAGEN DIGITALIZADA DEL EXTREMO EN ESPIRAL DEL RODILLO Y LOS PIXELES RESULTANTES SE ANALIZAN PARA DETERMINAR LAS LOCALIZACIONES DE LOS PUNTOS CENTRALES DE CADA CORDON. FINALMENTE, SE DETERMINAN LAS DISTANCIAS QUE SEPARAN LOS PUNTOS CENTRALES DE LOS CORDONES ADYACENTES Y SI FALLAN POR ENCIMA O DEBAJO DE LOS LIMITES PREDETERMINADOS, SE LLEGA A LA DETERMINACION DE QUE EL TEJIDO DE CALANDRO NO ES ACEPTABLE PARA FORMAR CUERPOS ESPESOS.
PROCEDIMIENTO PARA JUZGAR PLIEGOS IMPRESOS.
(16/11/1997). Solicitante/s: KOENIG & BAUER AKTIENGESELLSCHAFT. Inventor/es: BOLZA-SCHUNEMANN, CLAUS AUGUST, BOLZA-SCHUNEMANN, HANS-BERNHARD, DR.-ING., GERMANN, ALBRECHT JOSEF.
SE PRESENTA AQUI UN PROCEDIMIENTO PARA EL JUICIO CUALITATIVO DE PLIEGOS IMPRESOS QUE CONSISTE EN ASIGNAR UN MARGEN DE TOLERANCIAS PROPIO A CADA UNO DE LA PLURALIDAD DE ELEMENTOS DE IMAGEN, COMPUESTOS CADA UNO DE ELLOS POR UN NUMERO DE PUNTOS ELEGIBLE LIBREMENTE.
DISPOSITIVO Y METODO PARA LA DETERMINACION DE EFLORESCENCIA EN LADRILLOS.
(16/10/1997) DISPOSITIVO Y METODO PARA LA DETERMINACION DE EFLORESCENCIA EN LADRILLOS. QUE TIENE POR OBJETO DETERMINAR DICHAS EFLORESCENCIAS DE FORMA OBJETIVA; EL METODO SE CARACTERIZA PORQUE CUENTA CON UNA PRIMERA FASE DE ILUMINACION HOMOGENEA DE LA SUPERFICIE DE LA MUESTRA ; CON UNA SEGUNDA FASE DE OBTENCION DE LA IMAGEN DE LA SUPERFICIE, CON UNA TERCERA FASE DE PROCESAMIENTO DE LA IMAGEN DETERMINANDO, PREFERENTEMENTE, TRES CROMINANCIAS O TRES TONOS DIFERENTES DE INTENSIDAD LUMINOSA, CORRESPONDIENTES A LAS MANCHAS DE LA SUPERFICIE ; Y CON UNA CUARTA FASE DE OBTENCION DEL TANTO POR CIENTO OCUPADO POR CADA UNA DE DICHAS SUPERFICIES. EL DISPOSITIVO…
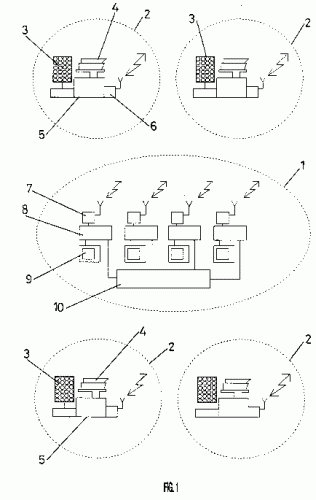
SISTEMA DE VIGILANCIA Y DETECCION DE FOCOS DE CALOR EN AREAS ABIERTAS.
(01/05/1997). Ver ilustración. Solicitante/s: EMPRESA NACIONAL BAZAN DE CONSTRUCCIONES NAVALES MILITARES, S.A. Inventor/es: ESPINAL DURAN, FRANCISCO JOSE, GARCIA MORAN, ANGEL, CRIADO GARCIA-LEGAZ, ANTONIO.
SISTEMA DE VIGILANCIA Y DETECCION DE FOCOS DE CALOR EN AREAS ABIERTAS, QUE COMPRENDE UN CONJUNTO INTEGRADO DE OBSERVATORIOS QUE INCLUYEN MEDIOS AUTONOMOS DE VISION INFRARROJA Y DIURNA Y ESTAN ENLAZADOS CON UNA ESTACION DE CONTROL CENTRAL, DONDE SE EFECTUA EL PROCESADO DE IMAGENES EN TIEMPO REAL, PARA LA DETECCION AUTOMATICA DE FOCOS DE CALOR, ESPECIALMENTE INCENDIOS, DENTRO DE UNA ZONA DE COBERTURA. EL SISTEMA ES APLICABLE A LA DETECCION AUTOMATICA DE INCENDIOS FORESTALES EN ZONAS DE VARIOS KILOMETROS CUADRADOS.
RECONOCIMIENTO DE COLORES DE IMAGENES UTILIZANDO FORMAS ARBITRARIAS EN ESPACIO EN COLOR.
(16/05/1995). Solicitante/s: ONCOR, INC. Inventor/es: TORRE-BUENO, JOSE R.
EN UN SISTEMA DE IDENTIFICACION DE COLORES, EN EL QUE SE CONVIERTE UNA SEÑAL DE VIDEO EN TRES SEÑALES (R-Y, B-Y E Y) DE ELEMENTOS DE COLORES MUTUAMENTE DISTINTOS, SE ESTABLECE UN CONJUNTO DE COLORES DEFINIDOS. LA INVENCION QUE SE EXPONE DEFINE CADA COLOR EN EL CONJUNTO MEDIANTE TRES COMPONENTES DE COLORES COMPUESTOS, DEFINIENDOSE CADA COMPONENTE DE COLOR COMPUESTO MEDIANTE COMBINACION DOS A DOS DE GAMAS DE MAGNITUDES DE ELEMENTOS DE COLORES. A MEDIDA QUE CAMBIAN LAS SEÑALES DE ELEMENTOS DE COLORES EN EL REGIMEN DE PIXEL (PUNTOS) DE LA SEÑAL DE VIDEO, LA INVENCION LOS COMBINA EN TRES SEÑALES COMPUESTAS, RESULTANDO CADA SEÑAL COMPUESTA DE LA COMBINACION DE UNA DE DOS RESPECTIVAS DE LAS SEÑALES DE COLORES. CADA UNA DE ESTAS COMBINACIONES DOS A DOS SE COMPARA CON LOS CONJUNTOS DE COMPONENTES DE COLORES COMPUESTOS PARA DETERMINAR SI EL PIXEL ACTUAL ENGLOBA UN COLOR EN EL CONJUNTO DE COLORES DEFINIDOS.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}