CIP-2021 : B25J 19/00 : Accesorios adaptados a los manipuladores, p. ej. para controlar,
para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
CIP-2021 › B › B25 › B25J › B25J 19/00[m] › Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
Notas[t] desde B21 hasta B32: CONFORMACION
B25J 19/02 · Dispositivos sensibles.
B25J 19/04 · · para la visión.
B25J 19/06 · Dispositivos de seguridad.
CIP2021: Invenciones publicadas en esta sección.
DISPOSITIVO PARA SUJETAR Y AJUSTAR UN ESPEJO EN UN SISTEMA DE LASER-ROBOT Y UN SISTEMA DE LASER-ROBOT QUE USA ESTE DISPOSITIVO.
(01/04/1995). Solicitante/s: COMAU S.P.A. CONSIGLIO NAZIONALE DELLE RICERCHE. Inventor/es: ORSI, MARIO, FIORA, ALDO.
SE DESCRIBE UN DISPOSITIVO PARA SUJETAR Y AJUSTAR UN ESPEJO EN UN SISTEMA DE LASER-ROBOT, INCLUYENDO ESTE SISTEMA UNA MULTITUD DE DICHOS ESPEJOS QUE REFLEJAN UN RAYO LASER SUCESIVAMENTE A LO LARGO DE UNA SENDA PREDETERMINADA A UNA CABEZA PARA EMITIR EL RAYO LASER.
MUÑECA PARA UN ROBOT INDUSTRIAL.
(01/12/1994). Solicitante/s: COMAU S.P.A.. Inventor/es: ORSI, MARIO, AMPARORE, MAURO.
UNA MUÑECA DE ROBOT CON DOS EJES DE ARTICULACION QUE TIENE UN PRIMER CUERPO QUE ES TRANSPORTADO AL EXTREMO DISTAL DEL BRAZO DEL ROBOT, UN SEGUNDO CUERPO SOPORTADO POR EL PRIMER CUERPO PARA SU ROTACION ALREDEDOR DEL PRIMER EJE QUE INTERSECTA EL EJE LONGITUDINAL DEL BRAZO DE ROBOT EN ANGULOS RECTOS, Y UN TERCER CUERPO SOSTENIDO POR EL SEGUNDO CUERPO PARA SU ROTACION ALREDEDOR DEL SEGUNDO EJE QUE INTERSECTA EL PRIMER EJE EN ANGULOS RECTOS. LOS DOS CUERPOS SON ROTADOS POR DOS MOTORES ELECTRICOS MONTADOS EN EL PRIMER CUERPO Y EN EL SEGUNDO CUERPO RESPECTIVAMENTE, CON LA INTERPOSICION DE UNIDADES DE REDUCCION DE "TRACCION HARMONICA" DEL TIPO EN EL QUE EL ROTOR DE SALIDA ES SOPORTADO PARA SU ROTACION MEDIANTE UN ELEMENTO DE SOPORTE DE CARGA QUE FORMA PARTE DE LA UNIDAD DE REDUCCION.
ENGRANAJE ACOPLABLE AUTONOMAMENTE POR SOBRECARGA.
(16/12/1993). Solicitante/s: EDAG ENGINEERING + DESIGN AKTIENGESELLSCHAFT. Inventor/es: BRINDLMAYER, FRANZ.
UN ENGRANAJE TIENE EN UNA PIEZA EXTERIOR DIVERSOS DISPOSITIVOS DE ENCAJE SITUADOS EN FORMA DE ESTRELLA, DOTADOS RESPECTIVAMENTE CON UN ELEMENTO DE ENCAJE QUE ESTA ENCLAVADO EN UNA PROFUNDIZACION INTERNA DE LA PIEZA ESTRUCTURAL . A CADA ELEMENTO DE ENCAJE SE SUBORDINA UN ESPACIO DE PRESION, POR MEDIO DEL CUAL EL ELEMENTO DE ENCAJE QUEDA ARMADO EN DIRECCION DE SU ENCAJE. TODOS LOS ESPACIOS DE PRESION ESTAN UNIDOS CON UN ESPACIO DE TRABAJO DE UN CILINDRO ACUMULADOR DE MUELLE . EL PUNTO DEL EMBOLO TENSOR DEL REFERIDO CILINDRO ACUMULADOR DE MUELLE ES VIGILADO PARA PODER FIJAR EL ENCASTRE DEL ENGRANAJE.
DISPOSITIVO PORTADOR DE REGULACION VERTICAL PARA UN INSTRUMENTO.
(01/12/1993). Solicitante/s: HAAG-STREIT AG WERKSTATTEN FUR PRAZISIONSMECHANIK. Inventor/es: WIDMER, HANSRUEDI, PAPRITZ, FRANZ.
SOBRE LA PIEZA SUPERIOR DE REGULACION VERTICAL MEDIANTE UN HUSILLO ACTUA UN MUELLE PARA COMPENSAR EL PESO DE LA PIEZA REGULABLE VERTICALMENTE. UN RESORTE DE COMPENSACION ACTUA POR UN EMBOLO SOBRE LA PIEZA SUPERIOR . MEDIANTE UN TORNILLO QUE ES ATORNILLABLE CON UN TALADRO DE ROSCA NO SE ACOPLA EN ALTURA EL EMBOLO CON UN TALADRO DE ROSCA NO SE ACOPLA EN ALTURA EL EMBOLO CON LA BASE Y SE DESCONECTA LA ACCION DEL RESORTE DE COMPENSACION. PUEDEN EXISTIR VARIOS RESORTES DE COMPENSACION Y PUEDE COMPENSAR DIFERENTES PESOS.
(16/11/1993). Solicitante/s: SIEMENS AKTIENGESELLSCHAFT. Inventor/es: WEULE, ROLAND, DIPL.-ING.
LA INVENCION CONSISTE EN UN ROBOT INDUSTRIAL PARA LA APLICACION EN CAMPOS SUSCEPTIBLES DE EXPLOSION. PARA EVITAR LA PENETRACION DE GASES EXPLOSIVOS SE APLICA UNA SOBREPRESION EN EL INTERIOR DEL ROBOT Y SE CONTROLA CON UN SENSOR DE PRESION. EL SISTEMA CON LAS CONDUCCIONES PUEDE SER UTILIZADO EN UN MODO DE FUNCIONAMIENTO SECUNDARIO TAMBIEN PARA EL BARRIDO DEL ESPACIO INTERIOR DEL ROBOT.
COLOCACION DE CONDUCCION DE SUMINISTRO PARA UN ROBOT.
(16/10/1993) EL INVENTO CONSISTE EN UNA COLOCACION DE CONDUCCION DE CONEXION PARA UN DISPOSITIVO DE NECESIDADES DE SUMINISTRO EN TODAS LAS POSICIONES GIRATORIAS QUE PUEDE ROTAR EN UN EJE GIRATORIO (D), ESPECIALMENTE PARA UN ROBOT. PARA ELLO LA COLOCACION DE CONDUCCION DE SUMINISTRO MUESTRA AL MENOS UNA CONDUCCION DE SUMINISTRO CARGADO DE RESISTENCIA A LA DOBLEZ (FK, WS, LS) QUE SE COLOCA EN ESPIRAL EN TORNO A UN EJE GIRATORIO (D) Y UN EXTREMO ESTA ACOPLADO CON UN DISPOSITIVO DE SUMINISTRO FIJO Y OTRO EXTREMO GIRANDO JUNTO CON EL DISPOSITIVO ROTATORIO (K). SE PREVE AL MENOS UNA DE LAS ESPIRALES DE CONDUCCION DE SUMINISTRO (VS)…
DISPOSITIVO DE EQUILIBRADO DE FUERZAS, EN PARTICULAR DE PESADEZ, ACTUANDO SOBRE UN BRAZO DE ROBOT O ANALOGO.
(01/10/1993). Solicitante/s: OPPERMANN, RENE SALESSE, CHRISTIAN. Inventor/es: SALESSE, CHRISTIAN, OPPERMANN, RENE.
DISPOSITIVO DE EQUILIBRADO DE FUERZAS ACTUANDO SOBRE UN BRAZO DE ROBOT ARTICULADO EN ROTACION ALREDEDOR DE UN EJE (A), ESTE DISPOSITIVO COMPRENDE UN NUMERO PAR DE PIEZAS AUXILIARES (24',24'') ARTICULADAS ALREDEDOR DE EJES B1, B2) PARALELOS ENTRE ELLOS Y PARALELOS AL EJE (A) DEL BRAZO, CADA UNA DE DICHAS PIEZAS SOPORTAN DOS BRAZOS TRANSVERSALES CUYOS EXTREMOS APTOS PARA APOYARSE CONTRA UNA PARTE RECTILINEA DE UN ORGANO MOVIL SOMETIDOS A UN ESFUERZO DE LLAMADA HACIA UNA POSICION INICIAL, LAS PIEZAS AUXILIARES (24, 24'') ESTAN ARRASTRADAS POR VELOCIDADES ANGULARES IGUALES EN VALOR ABSOLUTO PERO DOS A DOS EN SENTIDOS OPUESTOS E IGUALES TAMBIEN A LA MITAD DE LA VELOCIDAD ANGULAR DEL BRAZO DEL ROBOT.
LASER MAQUINA DE BALIZADO.
(16/02/1992). Solicitante/s: CINCINNATI MILACRON INC.. Inventor/es: BANNISTER, ROBERT D.
UNA MAQUINA ARTICULABLE ROBOTICA TIENE UN BRAZO PROA Y UNA UNIDAD PASADOR CAPAZ DE TOQUE UN INTERNO RAYO LASER RECIBIDO AL EXTREMO POPA DEL BRAZO PROA Y SALIENDO AL EXTREMO DELANTERO (21B) DEL BRAZO PROA A LO LARGO DE LA UNIDAD PASADOR DE PLATO UTILLAJE . UNA MARCA LASER GALVOENCABEZADO Y COLIMADOR CON AÑADIDOS AL PLATO UTILLAJE DEL PASADOR, Y UN LASER GENERADOR ES AÑADIDO AL BRAZO PROA DE LA MAQUINA ROBOT Y PROVISTA CON UN SISTEMA DE RAYO LASER DIRECTO DENTRO DEL EXTREMO POPA DEL BRAZO LASER. EL RENDIMIENTO MUESTRA UNA CABEZA GALVANICA QUE PUEDE SER MANIPULADO PARA UNA VARIEDAD DE POSICIONES QUE DETERMINADAS EN UN TRABAJO POR PIEZAS.
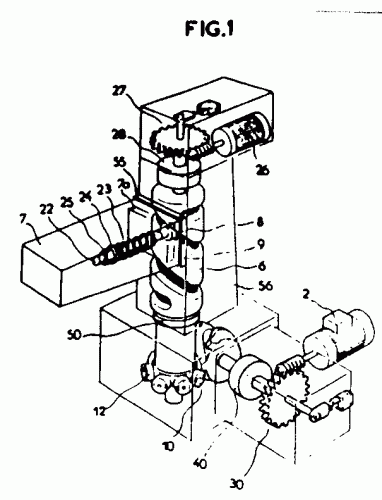
MANIPULADOR MECANICO DE EJES MULTIPLES CON CARRERA REGULABLE Y PROTECCION CONTRA SOBRECARGAS.
(16/08/1990). Ver ilustración. Solicitante/s: SOCIETE S.O.P.A.P. SA. Inventor/es: FREYWISS, ERIC.
MANIPULADOR MECANICO DE EJES MULTIPLES CON CARRERA REGULABLE Y PROTECCION CONTRA SOBRECARGAS. EL MOVIMIENTO ES TRANSMITIDO L MECANISMO DE POSICIONAMIENTO POR LA COMBINACION DE UN MOTOR-FRENO , DE UN REDUCTOR DE RUEDA Y TORNILLO SIN FIN Y DE UN LIMITADOR DE PAR AJUSTABLE . SE DETERMINA LA LEY DE MOVIMIENTO DEL MECANISMO DE POSICIONAMIENTO PARA OBTENER UNA VELOCIDAD CONSTANTE EN UNA AMPLIA BANDA, CON PUNTOS DE PARADA EVENTUALES. LA CONEXION DEL BASTIDOR GIRATORIO CON EL MECANISMO DE POSICIONAMIENTO SE OBTIENE POR MEDIO DE UN CAJETIN DE MUELLES . EL MOVIMIENTO ES TRANSMITIDO A LA LEVA CILINDRICA POR MEDIO DE UN LIMITADOR DE PAR AJUSTABLE . EL DESPLAZAMIENTO DEL BRAZO MANIPULADOR SE EFECTUA POR MEDIO DE UNA PLETINA PROVISTA DE MUELLES QUE PERMITE UN RETROCESO ANGULAR MOMENTANEO DEL BRAZO CUANDO SE ENCUENTRA CON UN OBSTACULO. EL MANIPULADOR TIENE APLICACION EN LA MANUTENCION DE CARGAS DE PIEZAS.
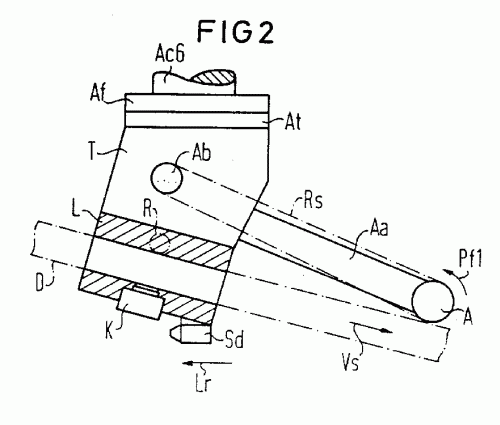
DISPOSITIVO PARA LA INSERCION DE PERFILES DE JUNTA.
(16/08/1988). Ver ilustración. Solicitante/s: SIEMENS AKTIENGESELLSCHAFT. Inventor/es: BURGER, RUDOLF, HARTMANN, GUNTER, HOH, DIETRICH.
DISPOSITIVO PARA LA INSERCION DE PERFILES DE JUNTA. PARA LA INSERCION DE PERFILES DE JUNTA (D) CON UN APARATO DE MANIPULACION PROGRAMABLE, ESPECIALMENTE CON UN ROBOT INDUSTRIAL SIRVE UN DISPOSITIVO EN EL QUE EL PERFIL DE JUNTA (D) ES CONDUCIBLE, POR MEDIO DE UNA GUIA LONGITUDINAL (L) ADAPTADA A LA FORMA DEL PERFIL, INMEDIATAMENTE DEBAJO DE UN RODILLO DE APRIETE (A) DISPUESTO A DISTANCIA DE ELLA, ESTANDO ACCIONADO EL RODILLO DE APRIETE (A) DE MANERA QUE AL INSERTAR NO SE PRODUCEN ESFUERZOS DE TRACCION, O SOLO DE PEQUEÑA MAGNITUD, EN EL PERFIL DE JUNTA (D). POR MEDIO DE UN DISPOSITIVO DE ESTE TIPO PUEDEN INSERTARSE POR EJEMPLO, JUNTAS DE PUERTA EN LA RANURA DE RECEPTACULOS DE LAVAVAJILLAS, NO CAUSANDO PROBLEMAS LAS CURVAS DE LA RANURA DEL RECEPTACULO MEDIANTE LA COMPENSACION DE LOS ESFUERZOS DE TRACCION.
DISPOSITIVO DE MEDICION PARA AJUSTAR LA BRIDA DE HERRAMIENTA DE UN ROBOT INDUSTRIAL.
(01/11/1984). Solicitante/s: GDA GESELLSCHAFT FUR DIGITALE AUTOMATION MBH.
DISPOSITIVO DE MEDICION PARA AJUSTAR LA BRIDA DE HERRAMIENTA DE UN ROBOT INDUSTRIAL.CONSTA DE UNA FUENTE LUMINOSA , FIJADA A LA BRIDA DE HERRAMIENTA Y GIRADA POR ESTA, QUE EMITE EN TRES DIRECCIONES RAYOS LUMINOSOS, MEDIANTE UN SISTEMA DE PRISMAS , Y CON UN DISPOSITIVO DE PROYECCION CONSISTENTE EN TRES DISCOS DISPUESTOS EN LAS MARCHAS DE LOS RAYOS, SIEMPRE EN ANGULO RECTO RESPECTO A ELLOS Y UBICADOS EN LUGAR FIJO ENTRE SI.
{kind=link}
{kind=link}