Procedimiento para el registro y la reproducción de una secuencia de eventos.
Procedimiento para el registro y la reproducción de una secuencia de eventos,
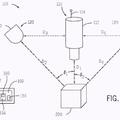
a saber de un evento deportivo en un campo de juego (1) tridimensional, tal como, p. ej., un partido de fútbol, con las etapas:
a) generar ininterrumpidamente datos de imágenes del campo de juego (1) con al menos dos o más cámaras (2), generando cada una de las cámaras (2) en cada caso una matriz de pixeles del campo de juego (1) o de una parte del campo de juego (1),
b) transmitir los datos de imágenes de las cámaras (2) a al menos una unidad de procesamiento (3) que presenta una unidad de elección de la región de interés (ROI),
c) elegir zonas de imágenes o bien pixeles de la matriz de pixeles, relevantes para el seguimiento de un objeto en el campo de juego (1) de una cámara (2) respectiva, mediante la unidad de elección de la ROI sobre la base de un algoritmo, en donde sobre la base de las informaciones de estos pixeles relevantes se generan datos de características locales para estos pixeles,
d) transmitir los datos de características locales de al menos dos cámaras (2), en particular de todas las cámaras (2), a al menos una unidad de evaluación (4) central antepuesta que realiza a continuación los siguientes pasos:
e) recopilación de datos de características locales de las al menos dos cámaras (2) para determinar una parte del objeto que ha sido detectado en un punto determinado en un espacio tridimensional conjuntamente en pixeles (A1- A8; B1-B8) en cada caso relevantes de estas cámaras (2),
f) repetición de la etapa e) para datos de características locales en zonas de la imagen de las cámaras (2), delimitando estas zonas de la imagen a las zonas de las imágenes relevantes de la etapa c), para la determinación de informaciones adicionales de una parte de objeto ya detectada,
g) construcción de un objeto tridimensional virtual (en 3D) en un espacio tridimensional virtual (en 3D) (6) sobre la base de las partes de objetos determinadas en las etapas e) y f), siendo el objeto en 3D (5) particularmente fiel a la realidad,
h) repetición de las etapas e) a g) para construir otros objetos virtuales en 3D (5) en el espacio virtual en 3D (6),
i) reconstrucción de un evento real recogido por las cámaras (2) en el espacio virtual en 3D (6) utilizando los objetos virtuales en 3D (5) construidos en las etapas g) y h), y
j) presentación visual del evento reconstruido en la etapa i) en una unidad de salida (7) particularmente móvil en forma de una secuencia de imágenes,
en donde las partes de objetos que han sido previamente determinadas en las etapas e) y f) son asociadas a partes de objetos de referencia tridimensionales (en 3D) (9.1-9.13) que están depositadas en un banco de datos de objetos (10) almacenado en la unidad de evaluación (4), estando las partes de objetos de referencia en 3D (9.1-9.13) definidos en cada caso como parte de objetos de referencia tridimensionales (en 3D) (9), adaptándose la posición y situación de las partes de objetos de referencia en 3D (9.1-9.13) en el espacio virtual en 3D (6) a la posición y situación de las partes de objetos determinadas en las etapas e) y f) y, a continuación, se construye en cada caso un objeto virtual en 3D (5) respectivo con ayuda de las partes de objetos de referencia en 3D (9.1-9.13) adaptadas en el espacio virtual en 3D (6),
caracterizado por que en la unidad de evaluación (4) está depositado un conjunto de datos de referencia en el que están almacenadas informaciones en relación con determinadas partes de objetos tales como, en particular, la configuración de colores y/o el dibujo de una camiseta del jugador y/o de un balón de fútbol y/o el color del pelo o de la piel de un jugador, o en relación con tipos predeterminados de partes de objetos, tales como, en particular, diferentes fisonomías de jugadores, siendo adaptada la presentación visual de los objetos virtuales en 3D en la etapa j) en función de las informaciones del conjunto de datos de referencia, en donde, en virtud de las informaciones del conjunto de datos de referencia (10) se adapta una textura, tal como, en particular, una configuración de color o un dibujo de los objetos virtuales en 3D para la presentación visual en la etapa j).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DE2013/000670.
Solicitante: GoalControl GmbH.
Nacionalidad solicitante: Alemania.
Dirección: Marienbongard 10 52062 Aachen ALEMANIA.
Inventor/es: LINDNER,BJORN, BEAUJEAN,RENÉ, PHILIPPS,JÜRGEN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06T15/00 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Interpretación de imagines 3D [Tridimensionales].
- G06T15/20 G06T […] › G06T 15/00 Interpretación de imagines 3D [Tridimensionales]. › Cálculo de perspectiva.
- G06T19/00 G06T […] › Manipulación de modelos 3D modelos o imágenes para gráficos de computador.
- G06T7/20 G06T […] › G06T 7/00 Análisis de imagen. › Análisis del movimiento (estimación del movimiento para codificación, decodificación, compresión o descompresión de señales de vídeo digitales H04N 19/43, H04N 19/51).
- G06T7/292 G06T 7/00 […] › Seguimiento multi-cámara.
- H04N5/222 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › H04N 5/00 Detalles de los sistemas de televisión (Detalles de los dispositivos de análisis o sus combinaciones con la producción de la tensión de alimentación H04N 3/00). › Circuitos de estudio; Dispositivos de estudio; Equipos de estudio.
PDF original: ES-2709116_T3.pdf
Patentes similares o relacionadas:
Método y sistema para producir una producción de video, del 15 de Abril de 2020, de Mediaproducción, S.L.U: Un método para generar una producción de video de un evento, el método que comprende: recibir una pluralidad de señales de video componente (122-1 […]
Claqueta automática ambidiestra, del 17 de Diciembre de 2019, de HEREDIA CAMPOY, Ivan: 1. Claqueta automática ambidiestra con panel giratorio mediante tornillo anclado a tuerca autoblocante situada en la barra fija , en cuya empuñadura […]
Dispositivos de asistencia a la visión e interfaces de usuario, del 11 de Septiembre de 2019, de FREEDOM SCIENTIFIC INC.: Un dispositivo de asistencia a la visión caracterizado por comprender: una carcasa que tiene una base para colocar la carcasa en una superficie , […]
 Conjunto de cámara para la extracción de discontinuidad de profundidad de imagen y procedimiento de uso, del 26 de Junio de 2019, de Wabtec Control Systems Pty Ltd: Un sistema de visión artificial que comprende:
un conjunto de cámara ;
una primera unidad de iluminación en comunicación […]
Conjunto de cámara para la extracción de discontinuidad de profundidad de imagen y procedimiento de uso, del 26 de Junio de 2019, de Wabtec Control Systems Pty Ltd: Un sistema de visión artificial que comprende:
un conjunto de cámara ;
una primera unidad de iluminación en comunicación […]
Dispositivo y procedimiento para determinar la ubicación diferente de una cámara de grabación de imágenes, del 26 de Junio de 2019, de Mika, Thorsten: Procedimiento para determinar la propia posición de una cámara de grabación de imágenes en un entorno en el que las estructuras son ópticamente […]
SOPORTE ESTABILIZADOR AUTOMÁTICO PARA CÁMARA FOTOGRÁFICA MEDIANTE SERVOMOTORES, del 20 de Abril de 2018, de ORDUÑA IBARRA, Miguel Angel: 1. Soporte estabilizador automático para cámara fotográfica mediante servomotores caracterizado porque comprende una primera superficie o superficie […]
SOPORTE ESTABILIZADOR AUTOMÁTICO PARA CÁMARA FOTOGRÁFICA MEDIANTE MOTORES DE DESPLAZAMIENTO LINEAL, del 20 de Abril de 2018, de ORDUÑA IBARRA, Miguel Angel: 1. Soporte estabilizador automático para cámara fotográfica mediante motores de desplazamiento lineal caracterizado porque comprende una primera […]
 SISTEMA PORTACÁMARAS ADAPTABLE AL CUERPO, CON UN ENSAMBLAJE MULTIFUNCIAONAL DE COMPONENTES ELÉCTRICOS, del 3 de Mayo de 2011, de CAMERA DYNAMICS GMBH: Sistema portacámaras adaptable al cuerpo, con al menos dos dispositivos conectores (1, 4, 7, 9, 9', 10, 11, 12) para la conexión de una cámara o un dispositivo periférico, por […]
SISTEMA PORTACÁMARAS ADAPTABLE AL CUERPO, CON UN ENSAMBLAJE MULTIFUNCIAONAL DE COMPONENTES ELÉCTRICOS, del 3 de Mayo de 2011, de CAMERA DYNAMICS GMBH: Sistema portacámaras adaptable al cuerpo, con al menos dos dispositivos conectores (1, 4, 7, 9, 9', 10, 11, 12) para la conexión de una cámara o un dispositivo periférico, por […]