Procedimiento de captación de imagen y sistema de captación de imagen.
Un sistema de captación de imagen para captar una imagen de un objeto,
comprendiendo el sistema:
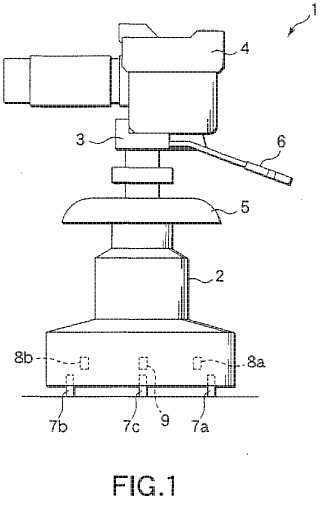
una unidad de cámara (1) que tiene una estructura en la que una cámara (4) para captar una imagen de un objeto se monta mediante un cabezal panorámico (3) sobre un pedestal móvil (2);
un medio de operación (13) para calcular una relación posicional entre la cámara y el objeto;
un medio de ajuste (12) para establecer una posición de referencia del pedestal móvil (2) y un ángulo de referencia del pedestal móvil (2) , sobre una superficie de suelo sobre la cual se mueve el pedestal móvil (2), en dicho medio de operación (13) ; y un medio de detección (11a, 11b, 11c) para detectar una cantidad de movimiento del pedestal móvil (2) desde la posición de referencia y un ángulo de rotación del mismo desde el ángulo de referencia;
en el que dicho medio de operación (13) está adaptado para calcular una posición y un ángulo de la cámara (4) con respecto al objeto basándose en la posición de referencia, el ángulo de referencia, y la cantidad de movimiento y el ángulo de rotación del pedestal móvil (2), y transmite datos de la posición y el ángulo de la cámara (4) con respecto al objeto a un ordenador (14) para crear una imagen que contiene una imagen del objeto real del objeto tomado con la cámara (4), dicho medio de detección (11a, 11b, 11c) está adaptado para detectar la cantidad de movimiento del pedestal móvil (2) midiendo la longitud de una parte de una rueda (7a, 7b, 7c) del pedestal móvil (2), parte que ha sido puesta en contacto con la superficie de suelo, el pedestal móvil (2) incluye tres ruedas (7a, 7b, 7c) distantes entre sí y dicho medio de detección incluye tres codificadores (11a, 11b, 11c) provistos respectivamente en las tres ruedas para hallar las distancias de movimiento de las ruedas respectivas (7a, 7b, 7c) en el movimiento del pedestal móvil (2) ,
caracterizado por comprender: rodillos (15) provistos respectivamente puestos en contacto con la superficie periférica exterior de las tres ruedas (7a, 7b, 7c) para hacerse girar junto con la rotación de las ruedas (7a, 7b, 7c) , y en el que dichos medios de operación están adaptados para hallar la distancia de movimiento de cada una de las tres ruedas (7a, 7b, 7c) a partir del número de rotaciones de un rodillo correspondiente de los rodillos (15) y un número de impulsos contados por un codificador correspondiente de los codificadores (11a, 11b, 11c) y en el que el medio de ajuste (12) incluye un mecanismo de detección de referencia para detectar la posición de referencia y el ángulo de referencia en relación con una línea de eje X y una línea de eje Y que se cruzan normalmente entre sí en un origen que corresponde a la posición de referencia sobre el suelo, el mecanismo de detección de referencia incluye dos primeros sensores (8a, 8b) para detectar la línea de eje X y un segundo sensor (9) para detectar la línea de eje Y, que están provistos en el pedestal móvil (2) , los medios de operación están configurados para calcular, cuando el pedestal móvil (2) se mueve con el origen interpuesto entre los dos primeros sensores (8a, 8b) y entre la primera y la segunda ruedas (7a, 7b) de las tres ruedas, que son distantes con respecto a su dirección de movimiento, la posición de referencia y el ángulo de referencia mediante el uso de recuentos de los codificadores, que se obtienen en un primer momento instantáneo cuando dichos dos primeros sensores (8a, 8b) pasan por la línea de eje X, y en un segundo momento instantáneo cuando dicho segundo sensor (9) pasa por la línea de eje Y, de manera que el ángulo de referencia se expresa como un ángulo LS en relación con la línea de eje X, y la posición de referencia se expresa como desplazamientos LY y LX respectivamente desde la línea de eje Y y la línea de eje X, y los medios de detección están configurados para detectar una cantidad de movimiento del pedestal móvil (2) desde la posición de referencia y un ángulo de rotación del pedestal móvil (2) desde el ángulo de referencia de acuerdo con los cambios en el LS, LY y LX obtenidos cuando el pedestal móvil (2) se mueve nuevamente.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E01124359.
Solicitante: SHOTOKU LTD.
Nacionalidad solicitante: Japón.
Dirección: 10-10, FUTAKO 6-CHOME, TAKATSU-KU KAWASAKI-SHI, KANAGAWA 213-000 JAPON.
Inventor/es: Watabe,Keijiro, Fujita,Iwao, Ebimoto,Naoki, Tanaka,Kohsei, Matsuno,Tadao.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H04N5/222 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › H04N 5/00 Detalles de los sistemas de televisión (Detalles de los dispositivos de análisis o sus combinaciones con la producción de la tensión de alimentación H04N 3/00). › Circuitos de estudio; Dispositivos de estudio; Equipos de estudio.
- H04N5/232 H04N 5/00 […] › Dispositivos para el control de las cámaras de televisión, p. ej. control a distancia (H04N 5/235 tiene prioridad).
PDF original: ES-2377193_T3.pdf
Fragmento de la descripción:
Procedimiento de captación de imagen y sistema de captación de imagen ANTECEDENTES DE LA INVENCIÓN
1. Campo de la invención
La presente invención se refiere a un procedimiento de captación de imagen y un sistema de captación de imagen de un sistema de cámara de tipo móvil usado para localización de películas y programas de televisión, y más específicamente a un procedimiento de captación de imagen y un sistema de captación de imagen de un sistema de cámara de tipo móvil adecuado para filmar en estudios virtuales.
2. Descripción de la técnica relacionada
Cuando se filma en un estudio, se usa un sistema de cámara de tipo móvil y tiene una estructura en la cual un cabezal panorámico se coloca sobre una base móvil denominada pedestal, y una cámara se pone sobre el cabezal panorámico. Luego, un camarógrafo filma una escena mientras que mueve el pedestal para cambiar apropiadamente el ángulo de la cámara.
En un estudio virtual, por ejemplo, existe un caso en que una imagen de un objeto real tomada con el sistema de cámara en el estudio y los gráficos generados por ordenador (CG) creados como su fondo o efecto, son manejados juntos una en relación con otros mientras que se mantiene la relación tridimensional de posición tal como se ve desde la posición de la cámara. En tal caso, se emplean técnicas de análisis de la posición bidimensional del pedestal en el espacio virtual, así como la posición y el ángulo de la cámara colocada sobre el pedestal. Es decir, según estas técnicas, cuando se determina la posición bidimensional del pedestal y la posición y el ángulo de la cámara, la relación entre las posiciones del pedestal, la cámara, un objeto y CG pueden averiguarse mediante cálculo. De esta manera, el objeto tomado por la cámara y la imagen CG pueden combinarse y moverse juntos unos respecto a otros mientras que se mantiene la relación tridimensional entre las posiciones del objeto y la imagen CG.
El documento EP-A-0971319 desvela sistema en el que un pedestal y un carro que sostiene una cámara se desplazan sobre raíles. El sistema permite que se cree una imagen sintética combinando una imagen de un objeto real con una imagen virtual.
El documento US-A-5008804 desvela sistema en el cual un pedestal móvil, o travelín, que sostiene una cámara se traslada sobre una superficie de suelo. El travelín se mueve de un objetivo a las inmediaciones de otro objetivo según una secuencia aprendida de movimientos controlada por un ordenador de travelín remoto. La secuencia aprendida de movimientos se enseña con la ayuda de una palanca de mando, y los movimientos son reproducidos basándose en estimación.
El documento EP-A-0458722 desvela un sistema y aparato para manipular y mover cajas, contenedores o similares de un lugar a otro dentro de una fábrica o un almacén, siguiendo instrucciones que pueden ser proporcionadas por un ordenador interno o externo. El aparato incluye una rueda de fricción que descansa sobre una de las dos ruedas posteriores y está conectada a un codificador de un número determinado de impulsos por giro, relacionando de este modo el número de impulsos con la distancia recorrida por la rueda.
El documento US-A-3741473 desvela un odómetro que está constituido por un bastidor conectable a una rueda de automóvil dirigible no motorizada para que sea móvil pero no giratoria con el mismo, y un rodillo soportado por el bastidor sobre un eje paralelo al eje de la rueda y empujado de manera resiliente contra la periferia del neumático de la rueda para hacerse rotar cuando gira la rueda, y un mecanismo utilizable para contar que indicar las revoluciones del rodillo.
Lo que viene a continuación son algunos de los ejemplos de las técnicas convencionales propuestas en consideración a lo anterior.
(1) El procedimiento de reconocer la posición bidimensional de un pedestal, en el que se hace un gran número de marcas de posición en el techo del estudio, y a medida que el sensor provisto en el pedestal lee algunas de las marcas, las marcas leídas son procesadas mediante procesamiento de imágenes, para reconocer así la posición del pedestal.
(2) El procedimiento de detectar la posición de un pedestal, en el que se coloca un marcador en el pedestal y el marcador es leído por una pluralidad de cámaras de detección provistas en el estudio, para detectar así la posición del pedestal.
(3) El procedimiento de reconocer el pedestal, en el que una marca como un código de barras, que está incluida en la imagen de fondo azul tomada con la cámara de estudio como el fondo, es leída por un detector, y la vista que corresponde a la marca es procesada mediante procesamiento de imágenes, para reconocer así la posición del
pedestal.
(4) El procedimiento de detectar la posición de un pedestal, en el que se tienden raíles en el estudio y el pedestal se traslada sobre ellos mientras que se detecta la distancia del movimiento.
Sin embargo, los procedimientos descritos anteriormente conllevan los siguientes inconvenientes, respectivamente.
En primer lugar, en cuanto al procedimiento (1) , en algunos casos las marcas de posición no pueden ser leídas desde la posición del pedestal. Más específicamente, normalmente hay un gran número de herramientas de iluminación que están suspendidas el techo de un estudio, y algunas de ellas bloquean físicamente la vista. Además, la lectura de una marca de posición puede ser perturbada por la luz de iluminación.
En cuanto al procedimiento (2) , a medida que se amplía el área detectable, se requiere un mayor número de cámaras de detección, aumentando así el coste.
En cuanto al procedimiento (3) , una marca incluida en la imagen de fondo siempre debe estar situada dentro de la vista de la cámara y, por lo tanto, un intervalo de movilidad de la cámara es limitado. Además, cuando el tamaño del objeto aumenta en la imagen, como en el acercamiento para primeros planos, etc., la proporción de la marca incluida en la imagen de fondo puede reducirse excesivamente comparada con toda la escena, haciendo así imposible detectarla en la imagen.
En cuanto al procedimiento (4) , el movimiento de la cámara está limitado por las pistas de los raíles y, por lo tanto, la aplicabilidad es baja.
Con cualquiera de los procedimientos descritos anteriormente, es difícil detectar con una gran exactitud la relación posicional entre la cámara y el objeto que ha de ser filmado.
BREVE RESUMEN DE LA INVENCIÓN
El objeto de la presente invención es proporcionar un procedimiento de captación de imagen y un sistema de captación de imagen que pueda hallar la relación de posición entre la cámara y un objeto con una gran exactitud, económicamente y sin causar limitación a la filmación.
Según un aspecto de la presente invención, se proporciona un procedimiento de captación de imagen para captar una imagen de un objeto con una cámara montada mediante un cabezal panorámico sobre un pedestal móvil, que comprende las etapas de: establecer una posición de referencia sobre una superficie de suelo sobre la cual se mueve el pedestal móvil, y un ángulo de referencia del pedestal móvil; detectar una cantidad de movimiento del pedestal móvil desde dicha posición de referencia y un ángulo de rotación del mismo desde dicho ángulo de referencia; hallar una posición y un ángulo de la cámara con respecto al objeto basándose en dicha posición de referencia, dicho ángulo de referencia, dicha cantidad de movimiento y dicho ángulo de rotación del pedestal móvil; y transmitir datos de la posición y el ángulo de la cámara con respecto al objeto, a un ordenador para crear una imagen que contiene una imagen del objeto real del objeto tomado con la cámara.
Según otro aspecto de la presente invención, se proporciona un sistema de captación de imagen para captar una imagen de un objeto, que comprende: una unidad de cámara que tiene una estructura en la que una cámara para captar una imagen de un objeto se monta mediante un cabezal panorámico sobre un pedestal móvil; un medio de operación para calcular una relación posicional entre la cámara y el objeto; un medio de ajuste para establecer una posición de referencia sobre una superficie de suelo sobre la cual se mueve el pedestal móvil, y un ángulo de referencia del pedestal móvil respecto a dicho medio de operación; y un medio de detección para detectar una cantidad de movimiento del pedestal móvil desde la posición de referencia, y un ángulo... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de captación de imagen para captar una imagen de un objeto, comprendiendo el sistema:
una unidad de cámara (1) que tiene una estructura en la que una cámara (4) para captar una imagen de un objeto se monta mediante un cabezal panorámico (3) sobre un pedestal móvil (2) ;
un medio de operación (13) para calcular una relación posicional entre la cámara y el objeto;
un medio de ajuste (12) para establecer una posición de referencia del pedestal móvil (2) y un ángulo de referencia del pedestal móvil (2) , sobre una superficie de suelo sobre la cual se mueve el pedestal móvil (2) , en dicho medio de operación (13) ; y un medio de detección (11a, 11b, 11c) para detectar una cantidad de movimiento del pedestal móvil (2) desde la posición de referencia y un ángulo de rotación del mismo desde el ángulo de referencia;
en el que dicho medio de operación (13) está adaptado para calcular una posición y un ángulo de la cámara (4) con respecto al objeto basándose en la posición de referencia, el ángulo de referencia, y la cantidad de movimiento y el ángulo de rotación del pedestal móvil (2) , y transmite datos de la posición y el ángulo de la cámara (4) con respecto al objeto a un ordenador (14) para crear una imagen que contiene una imagen del objeto real del objeto tomado con la cámara (4) , dicho medio de detección (11a, 11b, 11c) está adaptado para detectar la cantidad de movimiento del pedestal móvil (2) midiendo la longitud de una parte de una rueda (7a, 7b, 7c) del pedestal móvil (2) , parte que ha sido puesta en contacto con la superficie de suelo, el pedestal móvil (2) incluye tres ruedas (7a, 7b, 7c) distantes entre sí y dicho medio de detección incluye tres codificadores (11a, 11b, 11c) provistos respectivamente en las tres ruedas para hallar las distancias de movimiento de las ruedas respectivas (7a, 7b, 7c) en el movimiento del pedestal móvil (2) ,
caracterizado por comprender:
rodillos (15) provistos respectivamente puestos en contacto con la superficie periférica exterior de las tres ruedas (7a, 7b, 7c) para hacerse girar junto con la rotación de las ruedas (7a, 7b, 7c) , y en el que dichos medios de operación están adaptados para hallar la distancia de movimiento de cada una de las tres ruedas (7a, 7b, 7c) a partir del número de rotaciones de un rodillo correspondiente de los rodillos (15) y un número de impulsos contados por un codificador correspondiente de los codificadores (11a, 11b, 11c) y en el que el medio de ajuste (12) incluye un mecanismo de detección de referencia para detectar la posición de referencia y el ángulo de referencia en relación con una línea de eje X y una línea de eje Y que se cruzan normalmente entre sí en un origen que corresponde a la posición de referencia sobre el suelo, el mecanismo de detección de referencia incluye dos primeros sensores (8a, 8b) para detectar la línea de eje X y un segundo sensor (9) para detectar la línea de eje Y, que están provistos en el pedestal móvil (2) , los medios de operación están configurados para calcular, cuando el pedestal móvil (2) se mueve con el origen interpuesto entre los dos primeros sensores (8a, 8b) y entre la primera y la segunda ruedas (7a, 7b) de las tres ruedas, que son distantes con respecto a su dirección de movimiento, la posición de referencia y el ángulo de referencia mediante el uso de recuentos de los codificadores, que se obtienen en un primer momento instantáneo cuando dichos dos primeros sensores (8a, 8b) pasan por la línea de eje X, y en un segundo momento instantáneo cuando dicho segundo sensor (9) pasa por la línea de eje Y, de manera que el ángulo de referencia se expresa como un ángulo LS en relación con la línea de eje X, y la posición de referencia se expresa como desplazamientos LY y LX respectivamente desde la línea de eje Y y la línea de eje X, y los medios de detección están configurados para detectar una cantidad de movimiento del pedestal móvil (2) desde la posición de referencia y un ángulo de rotación del pedestal móvil (2) desde el ángulo de referencia de acuerdo con los cambios en el LS, LY y LX obtenidos cuando el pedestal móvil (2) se mueve nuevamente.
2. El sistema según la reivindicación 1, caracterizado porque el mecanismo de detección de referencia calcula el ángulo LS por la siguiente fórmula [1], LS = tan-1 ( (a – b) cosS/ (M – (a – b) sinS) ) [1]
donde “a” y “b” son distancias de movimiento de la primera y la segunda ruedas (7a, 7b) obtenidas en el primer momento instantáneo, “S” es un ángulo de dirección del pedestal móvil (2) establecido en el primer momento instantáneo, y “M” es una distancia entre los dos primeros sensores (8a, 8b) .
3. El sistema según la reivindicación 1, caracterizado porque el mecanismo de detección de referencia calcula el ángulo LS por la siguiente fórmula [2], LS = tan-1 { (a – b) /Nc} [2]
donde “a” y “b” son distancias de movimiento de la primera y la segunda ruedas (7a, 7b) obtenidas en el primer momento instantáneo, y “Nc” es una distancia entre la primera y la segunda ruedas (7a, 7b) .
4. El sistema según la reivindicación 2 ó 3, caracterizado porque el mecanismo de detección de referencia calcula los desplazamientos LY y LX por las siguientes fórmulas [3] y [4], respectivamente, LY = (M/2) sinLS [3] LX = SsinLS [4]
donde “M” es una distancia entre los dos primeros sensores (8a, 8b) y “S” es una distancia entre una línea que conecta los centros de los dos primeros sensores (8a, 8b) y el segundo sensor (9) .
5. El sistema según una cualquiera de las reivindicaciones 1 a 4, caracterizado porque cada uno de los dos primeros sensores (8a, 8b) y el segundo sensor (9) está formado por un sensor óptico.
6. Un procedimiento de captación de imagen para captar una imagen de un objeto mediante el sistema según una cualquiera de las reivindicaciones 1 a 5, comprendiendo el procedimiento las etapas de:
establecer la posición de referencia y el ángulo de referencia;
detectar una cantidad de movimiento del pedestal móvil (2) desde dicha posición de referencia y un ángulo de rotación del pedestal móvil (2) desde dicho ángulo de referencia;
hallar una posición y un ángulo de la cámara (4) con respecto al objeto basándose en dicha posición de referencia, dicho ángulo de referencia, dicha cantidad de movimiento y dicho ángulo de rotación del pedestal móvil (2) ; y transmitir datos de la posición y el ángulo de la cámara (4) con respecto al objeto, a un ordenador para crear una imagen que contiene una imagen del objeto real del objeto tomado con la cámara, caracterizado porque la etapa de establecer la posición de referencia y el ángulo de referencia incluye una etapa de detectar la posición de referencia y el ángulo de referencia en relación con la línea de eje X y la línea de eje Y que se cruzan normalmente entre sí en un origen que corresponde a la posición de referencia sobre el suelo, y una etapa de mover el pedestal móvil (2) con el origen interpuesto entre los dos primeros sensores (8a, 8b) y entre la primera y la segunda ruedas (7a, 7b) de las tres ruedas, que son distantes con respecto a su dirección de movimiento, para calcular la posición de referencia y el ángulo de referencia mediante el uso de recuentos de los codificadores, que se obtienen en un primer momento instantáneo cuando dichos dos primeros sensores (8a, 8b) pasan por la línea de eje X, y en un segundo momento instantáneo cuando dicho segundo sensor (9) pasa por la línea de eje Y, de manera que el ángulo de referencia se expresa como un ángulo LS en relación con la línea de eje X, y la posición de referencia se expresa como desplazamientos LY y LX respectivamente desde la línea de eje Y y la línea de eje X, y la etapa de detectar una cantidad de movimiento y un ángulo de rotación incluye una etapa de detectar una cantidad de movimiento del pedestal móvil (2) desde la posición de referencia y un ángulo de rotación del pedestal móvil (2) desde el ángulo de referencia de acuerdo con los cambios en el LS, LY y LX obtenidos moviendo nuevamente el pedestal móvil (2) .
Patentes similares o relacionadas:
Retenedor para dispositivo de aumento electrónico, del 15 de Julio de 2020, de FREEDOM SCIENTIFIC INC.: Un dispositivo de aumento para su uso por usuarios ciegos o con baja visión, incluyendo el dispositivo de aumento una mesa que tiene un borde delantero, […]
Dispositivo de imágenes para escenas en movimiento aparente, del 17 de Junio de 2020, de Urugus S.A: Un aparato para obtener imágenes de una escena que tiene movimiento aparente, el aparato que comprende: un dispositivo de imágenes de área […]
Dispositivo que comprende un dispositivo de imágenes multicanal y procedimiento para producirlo, del 3 de Junio de 2020, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Un dispositivo que comprende: una carcasa que tiene una primera área transparente (14a) y una segunda área transparente (14b); […]
Dispositivo de ajuste de eje óptico de cámara, y cámara que lo tiene, del 27 de Mayo de 2020, de Hangzhou Hikmicro Sensing Technology Co., Ltd: Un dispositivo de ajuste de eje óptico de cámara, caracterizado porque se usa para ajustar un sistema de eje óptico de cámara y comprende: un soporte […]
Enfoque para escena de fuente de luz puntual, del 15 de Abril de 2020, de Zhejiang Uniview Technologies Co., Ltd: Un procedimiento de enfoque, que comprende: establecer posiciones de una lente de enfoque secuencialmente; registrar información estadística […]
Procedimiento de fotografía usando un dispositivo electrónico externo y dispositivo electrónico que soporta el mismo, del 1 de Abril de 2020, de SAMSUNG ELECTRONICS CO., LTD.: Un dispositivo electrónico que comprende: un circuito de comunicación; una memoria configurada para almacenar contenidos que incluyen una cuarta imagen en la que se […]
Procedimiento y aparato de grabación de imagen de vídeo en un terminal portátil que tiene doble cámara, del 1 de Abril de 2020, de SAMSUNG ELECTRONICS CO., LTD.: Un procedimiento de grabación de vídeo por un terminal portátil de doble cámara , que comprende: emitir un primer flujo de vídeo capturado por una primera […]
Técnicas para enfocar automáticamente una cámara digital, del 18 de Marzo de 2020, de QUALCOMM INCORPORATED: Un dispositivo de comunicación inalámbrica configurado para comunicaciones inalámbricas, el cual comprende: una memoria configurada para […]