Procedimiento para calibrar un punto central de una herramienta para un sistema de robot industrial.
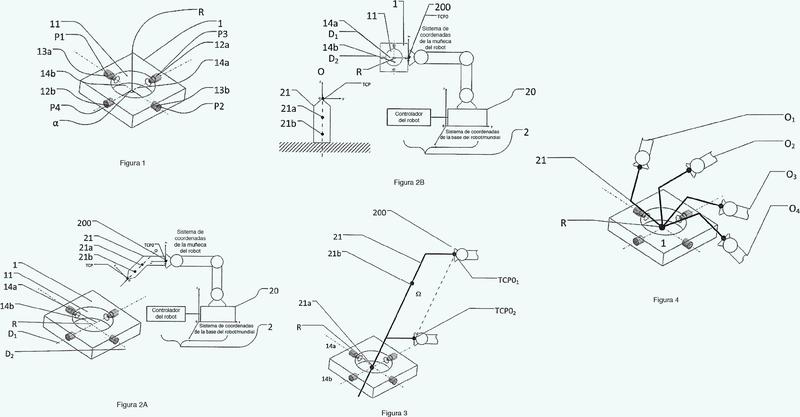
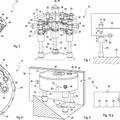
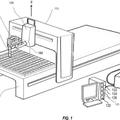
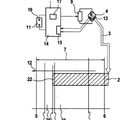
Procedimiento para calibrar un punto central de una herramienta (21) para un sistema de robot industrial (2) que comprende un sensor de haces cruzados (1) que tiene un primer haz (14a) y un segundo haz (14b) que forman un ángulo entre sí con un ángulo de vértice mayor de cero y se cruzan entre sí en un punto de intersección (R),
que incluye:
(a) mover relativamente una primera parte (21a) de la citada herramienta y un sensor de haces cruzados (1) mediante dicho robot industrial (20) con un movimiento de traslación en una orientación (O) de modo que dicha primera parte (21a) de la citada herramienta (21) interrumpe respectivamente dicho primer haz (14a) y dicho segundo haz (14b) del citado sensor de haces cruzados (1);
(b) registrar una primera posición y una segunda posición de dicho robot industrial (20) durante las interrupciones de dicho primer haz (14a) y dicho segundo haz (14b) del citado sensor de haces cruzados (1) mediante dicha primera parte (21a) de la citada herramienta (21);
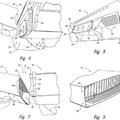
(c) mover relativamente una segunda parte (21b) de la citada herramienta (21) y el citado sensor de haces cruzados (1) mediante dicho robot industrial (20) con un movimiento de traslación mientras se mantiene dicha orientación (O) de modo que dicha segunda parte (21b) de la citada herramienta (21) interrumpe respectivamente dicho primer haz (14a) y dicho segundo haz (14b) del citado sensor de haces cruzados (1);
(d) registrar una tercera posición y una cuarta posición de dicho robot industrial (20) durante las interrupciones de dicho primer haz (14a) y dicho segundo haz (14b) del citado sensor de haces cruzados (1) mediante dicha segunda parte (21b) de la citada herramienta (21);
(e) calcular la orientación de la herramienta (Ω) teniendo en cuenta dicha primera posición, segunda posición, tercera posición y cuarta posición de dicho robot industrial (20), así como dicha dirección del primer haz (D1) y dicha dirección del segundo haz (D2); y
(f) mover relativamente la citada herramienta (21) y el citado sensor de haces cruzados (1) mediante dicho robot industrial (20) de modo que dicho punto central de la citada herramienta (21) interrumpe dicho punto de intersección (R) del citado sensor de haces cruzados (1) teniendo en cuenta dicha orientación de la herramienta (Ω) y la primera y la segunda posición o bien la tercera y la cuarta posición de dicho robot industrial (20).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/CN2014/076578.
Solicitante: ABB SCHWEIZ AG.
Nacionalidad solicitante: Suiza.
Dirección: BROWN BOVERI STRASSE 6 5400 BADEN SUIZA.
Inventor/es: LI,JINSONG, GU,HAO, CHI,YONGLIN, XU,YAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05B19/402 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › caracterizado por disposiciones de control para el posicionamiento, p. ej. centrado de una herramienta con respecto a un agujero en la pieza de trabajo, medios de detección adicionales para corregir la posición (G05B 19/19 tiene prioridad).
PDF original: ES-2754039_T3.pdf
Patentes similares o relacionadas:
 Dispositivo de alineación para herramientas de torneado, del 29 de Julio de 2020, de GÜHRING KG: Dispositivo de alineación para disponer sobre una herramienta de torneado, , en particular sobre un vástago de herramienta o una punta […]
Dispositivo de alineación para herramientas de torneado, del 29 de Julio de 2020, de GÜHRING KG: Dispositivo de alineación para disponer sobre una herramienta de torneado, , en particular sobre un vástago de herramienta o una punta […]
 Métodos y sistemas de unión ala-fuselaje, del 29 de Enero de 2020, de THE BOEING COMPANY: Un metodo de union ala-fuselaje para una aeronave , comprendiendo el metodo:
(a) calcular un ajuste virtual entre un conjunto […]
Métodos y sistemas de unión ala-fuselaje, del 29 de Enero de 2020, de THE BOEING COMPANY: Un metodo de union ala-fuselaje para una aeronave , comprendiendo el metodo:
(a) calcular un ajuste virtual entre un conjunto […]
Procedimiento para monitorizar la concentricidad de una herramienta de una máquina herramienta NC y máquina herramienta NC con control de concentricidad, del 30 de Octubre de 2019, de SCHWABISCHE WERKZEUGMASCHINEN GMBH: Procedimiento para monitorizar la concentricidad de una herramienta de una máquina herramienta NC , que puede rotar alrededor del eje […]
Dispositivo de diagnóstico de fallos y método de diagnóstico de fallos, del 9 de Octubre de 2019, de NISSAN MOTOR CO., LTD.: Un dispositivo de diagnóstico de fallos aplicable a un dispositivo mecánico provisto de un motor como fuente para accionar un eje de […]
Aparato de control numérico, del 11 de Septiembre de 2019, de MITSUBISHI ELECTRIC CORPORATION: Un dispositivo de control numérico para mecanizar un objeto de mecanizado moviendo una herramienta y el objeto de mecanizado uno en relación […]
Procedimiento y dispositivo para detectar y corregir una ubicación espacial de una pieza de trabajo sostenida en un dispositivo de posicionamiento, del 4 de Septiembre de 2019, de JENOPTIK AUTOMATISIERUNGSTECHNIK GMBH: Procedimiento para detectar y corregir una ubicación espacial de una pieza de trabajo no simétrica en rotación sostenida en un dispositivo de posicionamiento […]
 Sistema y método para el corte por plasma de NC de una tela metálica, del 28 de Agosto de 2019, de FAGAN, MATTHEW: Una máquina cortadora de Control Numérico (NC) para el corte por plasma de una tela metálica , que comprende:
un ordenador que tiene una memoria […]
Sistema y método para el corte por plasma de NC de una tela metálica, del 28 de Agosto de 2019, de FAGAN, MATTHEW: Una máquina cortadora de Control Numérico (NC) para el corte por plasma de una tela metálica , que comprende:
un ordenador que tiene una memoria […]
 ACCIONAMIENTO ELECTROMOTÓRICO PARA UNA PIEZA DE AJUSTE DE VEHÍCULO DE MOTOR ASI COMO PROCEDIMIENTO DE ACTIVACIÓN, del 9 de Marzo de 2011, de ROBERT BOSCH GMBH: - Accionamiento electromotórico para una pieza de ajuste de vehículo de motor que puede desplazarse al menos hasta una posición objetivo definida, […]
ACCIONAMIENTO ELECTROMOTÓRICO PARA UNA PIEZA DE AJUSTE DE VEHÍCULO DE MOTOR ASI COMO PROCEDIMIENTO DE ACTIVACIÓN, del 9 de Marzo de 2011, de ROBERT BOSCH GMBH: - Accionamiento electromotórico para una pieza de ajuste de vehículo de motor que puede desplazarse al menos hasta una posición objetivo definida, […]