Dispositivo multiplataforma de disparo remoto.
1. Dispositivo multiplataforma de disparo remoto caracterizado porque comprende:
- Un sistema de emisión/recepción de órdenes.
- Un sistema de emisión/recepción de imágenes.
- Un soporte para armas.
- Una plataforma móvil motorizada, dotada de estabilización automática y controlada de forma remota.
- Elemento de unión entre el dispositivo y su ubicación.
- Mecanismo que permite el disparo remoto de la pistola. Accionamiento mecánico. Accionamiento electrónico.
- Un dispositivo de selección de objetivos y puntería.
- Un dispositivo de alimentación de energía eléctrica.
- Un circuito electrónico transmisor de información por cable.
- Un dispositivo de grabación de imágenes.
- Un dispositivo de rastreo para localizar emisores colocados en animales.
2. Dispositivo multiplataforma de disparo remoto según la reivindicación 1, caracterizado porque comprende un sistema de emisión/recepción de órdenes, compuesto por:
- Un mando de radiocontrol emisor de señales inalámbricas.
- Un receptor de señales.
- Cableado y conexiones.
3. Dispositivo multiplataforma de disparo remoto según la reivindicación 1, caracterizado porque comprende un sistema de emisión/recepción de imágenes de video, compuesto por:
- Cámaras.
- Dispositivo de aumento variable de imagen (zoom).
- Conmutador de video.
- Un emisor de video.
- Un receptor de video.
- Un monitor o gafas de realidad virtual FPV.
4. Dispositivo de multiplataforma disparo remoto según la reivindicación 1, caracterizado porque comprende una plataforma móvil motorizada que permite realizar movimientos en uno de sus ejes (inclinación), en dos de sus ejes (rotación, inclinación) o en tres de sus ejes (rotación, inclinación y alabeo), permitiendo el movimiento del dispositivo en cualquier dirección deseada de forma remota, y dotada de un sistema de control electromecánico que estabiliza el conjunto de forma automática. El movimiento podrá ordenarse desde el mando emisor manualmente, o de forma automática mediante movimientos de la cabeza con un dispositivo incorporado en las gafas y conectado al mando emisor.
Compuesto por:
- Estructura.
- Motores.
- Sistema electrónico de estabilización automática.
- Sistema de control remoto.
5. Dispositivo multiplataforma de disparo remoto según la reivindicación 1, caracterizado porque comprende un soporte que permitirá la instalación del dispositivo en diferentes ubicaciones o estructuras. Podrán ser de:
- Ubicación fija: instalados sobre bípodes, trípodes, mástiles, plataformas etc.
- Ubicación móvil: instalados en vehículos.
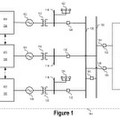
6. Dispositivo multiplataforma de disparo remoto según la reivindicación 1, caracterizado porque comprende un dispositivo que permite el disparo de un arma de funcionamiento electrónico de forma remota, compuesto por:
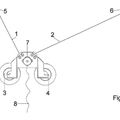
- Un mando de radio control que envía la orden mediante el uso de un pulsador (1).
- Un receptor que la recibe y procesa (3).
- Un interruptor electrónico, relé o elemento capaz de cerrar el circuito electrónico (12), que sustituye al sistema de accionamiento original de la pistola electrónica.
- Una conexión por cable del receptor (3) que lo une al interruptor electrónico (12) por el canal de disparo y permite activar el disparo cuando el mando (1) envía la orden.
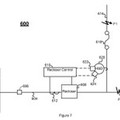
7. Dispositivo multiplataforma de disparo remoto según la reivindicación 1, caracterizado porque comprende un dispositivo que permite el disparo de un arma de funcionamiento mecánico de forma remota, compuesto por:
- Un mando de radio control que envía la orden mediante el uso de un pulsador (1).
- Un receptor que la recibe y procesa (3).
- Un servomotor (9), cuyo brazo presiona directamente el gatillo de la pistola al activarse.
- Una conexión por cable del receptor (3) que lo une al servomotor (9) por el canal de disparo y permite activar el disparo cuando el mando (1) envía la orden.
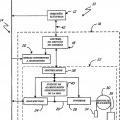
8. Dispositivo multiplataforma de disparo remoto según la reivindicación 1, caracterizado porque comprende un dispositivo de selección de objetivos y puntería, que permite disparar con precisión compuesto por:
- Una cámara de alta definición con visor óptico de aumento variable y enfoque automático.
Conectada al sistema de emisión/recepción de video permite, transmitir en tiempo real en la pantalla del control remoto, la imagen del objetivo donde queremos disparar.
Conectada al sistema de transmisión/recepción de órdenes, permite actuar sobre el visor óptico de aumento variable ampliando la imagen que recibimos en nuestro monitor de forma gradual, mediante el accionamiento de un potenciómetro del mando de control.
- Una cámara de infrarrojos que permite localizar el objetivo en la oscuridad o situaciones de escasa visibilidad.
Conectada al sistema de emisión/recepción de video permite, transmitir en tiempo real en la pantalla del control remoto, la imagen captada por la cámara.
- Una cámara térmica (que permite la localización de objetivos por su temperatura), o multiespectral, (que permite localizar objetivos capturando imágenes de bandas espectrales visibles y no visibles, además de imágenes RGB.)
Conectada al sistema de emisión/recepción de video permite, transmitir en tiempo real en la pantalla del control remoto, la imagen captada por la cámara.
- Un conmutador de canal de video. Este dispositivo recibe las imágenes por cable de las cámaras antes descritas, y está situado justo antes del sistema de emisión de video. Conectado al sistema de emisión/recepción de órdenes, permite desde el mando emisor elegir la imagen que llegara al sistema de emisión/recepción de video, y que visualizaremos en el monitor.
- Un sistema de puntería láser con accionamiento remoto. El sistema cuenta con un láser rojo y un láser verde, siendo el láser rojo para utilizarlo por la noche y el láser verde para emplearlo durante el día. Estarán calibrados de manera que los disparos efectuados impacten en el lugar marcado por el láser, permitiendo apuntar con mayor facilidad. Estarán conectados al sistema de emisión/recepción de órdenes, y a través del mando emisor mediante interruptores podemos seleccionar si queremos emplear el láser rojo o verde, y activarlo solo el tiempo imprescindible para realizar el disparo, ya que de no ser así podría dañar seriamente la visión de las personas situadas incluso a cientos de metros.
-Un módulo OSD, aparato electrónico que permite incluir datos esenciales para el sistema de puntería dentro de la pantalla del sistema de emisión/recepción de imágenes. De esta manera dispondremos de elementos útiles incorporados en el monitor tales como altitud, posición GPS, velocidad, distancia entre otros. Siendo el más importante la incorporación de una marca en el centro de la pantalla similar al de las miras telescópicas en armas de caza o militares convencionales, calibrada de manera que los disparos impacten en el lugar que marca el centro de la pantalla, permitirán ver el lugar exacto donde impactarán los proyectiles.
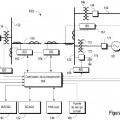
9. Dispositivo multiplataforma de disparo remoto según la reivindicación 1, caracterizado porque comprende un sistema de alimentación eléctrica a través de una batería propia o mediante alimentación exterior. Compuesta por:
- Alimentación eléctrica. (Batería interna o alimentación externa)
- Placa de distribución eléctrica y conexión de cables.
- Transformadores eléctricos, para regular la tensión adecuada a cada elemento.
- Cables de diferentes secciones en función del circuito.
10. Dispositivo multiplataforma de disparo remoto según la reivindicación 1, caracterizado porque comprende un circuito electrónico de transmisión información por cable. Será el encargado de transmitir las órdenes e información necesaria entre los diferentes componentes electrónicos y en ocasiones alimentación eléctrica.
11. Dispositivo multiplataforma de disparo remoto según la reivindicación 1, caracterizado porque comprende un dispositivo de grabación de imágenes, que situado en el dispositivo y en el mando de control permitirá almacenar las imágenes para su posterior análisis.
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201800187.
Solicitante: PEÑA SAINZ-AJA, Saul.
Nacionalidad solicitante: España.
Provincia: BURGOS.
Inventor/es: PEÑA SAINZ-AJA,Saul.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05D3/12 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 3/00 Control de la posición o de la dirección (G05D 1/00 tiene prioridad; control de programa numérico G05B 19/18). › utilizando realimentación.
PDF original: ES-1218216_U.pdf
Patentes similares o relacionadas:
Aparato y método para proporcionar control de compensación de movimiento activo de un pasarela articulada, del 2 de Abril de 2019, de Seaonics AS: Pasarela articulada que comprende al menos una parte fija que puede montarse de manera fija en una embarcación de navegación marítima, una parte móvil que puede […]
Método de control de tiro para defensa antiaérea basada en armas de fuego, del 27 de Marzo de 2019, de BAE SYSTEMS BOFORS AB: Método de control de tiro de armas contra blancos aéreos cuando se dirigen hacia un objeto de protección, en el que se conoce la posición […]
Aparato de control, cabezal de soporte que usa el mismo, y método de control de cabezal de soporte, del 16 de Enero de 2019, de SZ DJI Osmo Technology Co., Ltd: Cardán para controlar un dispositivo óptico para realizar una acción, que comprende un dispositivo de control, un conjunto de control conectado con el dispositivo […]
 Desconexión de carga bajo demanda en un ascensor, del 23 de Septiembre de 2015, de OTIS ELEVATOR COMPANY: Un procedimiento de funcionamiento de un sistema de ascensor, en el que el procedimiento comprende:
recibir una solicitud desde una compañía eléctrica para reducir […]
Desconexión de carga bajo demanda en un ascensor, del 23 de Septiembre de 2015, de OTIS ELEVATOR COMPANY: Un procedimiento de funcionamiento de un sistema de ascensor, en el que el procedimiento comprende:
recibir una solicitud desde una compañía eléctrica para reducir […]
 Control distribuido coordinado de área amplia para sistemas de suministro de energía eléctrica, del 29 de Junio de 2015, de SCHWEITZER ENGINEERING LABORATORIES, INC.: Control distribuido coordinado de área amplia para sistemas de suministro de energía eléctrica.
Los controladores distribuidos en un sistema de suministro de […]
Control distribuido coordinado de área amplia para sistemas de suministro de energía eléctrica, del 29 de Junio de 2015, de SCHWEITZER ENGINEERING LABORATORIES, INC.: Control distribuido coordinado de área amplia para sistemas de suministro de energía eléctrica.
Los controladores distribuidos en un sistema de suministro de […]
 Señalización de alta velocidad de condiciones de un sistema de energía, del 16 de Febrero de 2015, de SCHWEITZER ENGINEERING LABORATORIES, INC.: Señalización de alta velocidad de condiciones de un sistema de energía.
Un dispositivo de señalización de alta velocidad en una derivación de un sistema […]
Señalización de alta velocidad de condiciones de un sistema de energía, del 16 de Febrero de 2015, de SCHWEITZER ENGINEERING LABORATORIES, INC.: Señalización de alta velocidad de condiciones de un sistema de energía.
Un dispositivo de señalización de alta velocidad en una derivación de un sistema […]
 Sistemas y procedimientos de sincronización de sistemas de generación distribuida, del 3 de Junio de 2014, de SCHWEITZER ENGINEERING LABORATORIES, INC.: Sistemas y procedimientos de sincronización de sistemas de generación distribuida.
Se divulga un sistema para la gestión y la sincronización de la operación […]
Sistemas y procedimientos de sincronización de sistemas de generación distribuida, del 3 de Junio de 2014, de SCHWEITZER ENGINEERING LABORATORIES, INC.: Sistemas y procedimientos de sincronización de sistemas de generación distribuida.
Se divulga un sistema para la gestión y la sincronización de la operación […]
 MAQUINA ATOPORTANTE PARA DESPLAZAR HERRAMIENTAS DIVERSAS ENFRENTADAS AUNA SUPERFICIE VERTICAL, del 26 de Marzo de 2010, de CORUJO TILVE,JUAN PABLO: Máquina autoportante para desplazar herramientas diversas enfrentadas a una superficie vertical, en todas direcciones, caracterizada porque […]
MAQUINA ATOPORTANTE PARA DESPLAZAR HERRAMIENTAS DIVERSAS ENFRENTADAS AUNA SUPERFICIE VERTICAL, del 26 de Marzo de 2010, de CORUJO TILVE,JUAN PABLO: Máquina autoportante para desplazar herramientas diversas enfrentadas a una superficie vertical, en todas direcciones, caracterizada porque […]