SISTEMA DE COMPENSACIÓN DE VELOCIDAD DE SOBREVUELO DURANTE LA ESTABILIZACIÓN DE UNA CÁMARA AEROTRANSPORTADA.
Procedimiento para controlar la orientación de un dispositivo para que permanezca fijado en un blanco (302),
estando el dispositivo en un vehículo (200; 300) que se mueve a una velocidad relativa a la posición actual del blanco, en donde el procedimiento comprende:
establecer una orientación inicial para el dispositivo que se apunta en la posición actual del blanco;
calcular (701) una matriz de transformación CCE para transformar de un marco de referencia terrestre a un marco de referencia de dispositivo;
calcular y establecer la orientación del dispositivo periódicamente, en donde calcular la orientación incluye,
calcular (702) un vector de posición ΔRE entre el vehículo y el blanco en el marco de referencia terrestre como: ΔRE = REtarget - REvehicle, en donde REtarget representa la posición actual del blanco y REvehicle representa la posición actual del vehículo;
calcular (703) un vector de posición ΔRC entre el vehículo y el blanco en el marco de referencia del dispositivo transformando el vector posición ΔRE al marco de referencia de dispositivo ΔRC = CCEΔRE; y
calcular (704) un vector de posición normalizado 106 como ,
en donde el vector de posición normalizado indica la diferencia entre una línea de visión actual del dispositivo y una línea de visión necesaria para apuntar al blanco en las direcciones del escaneo e inclinación;
calcular y establecer una velocidad angular periódicamente para mover el dispositivo en las direcciones de escaneo e inclinación basado en la posición actual del dispositivo para compensar la velocidad relativa entre el vehículo y el blanco, en donde calcular la velocidad angular incluye,
calcular (705) un vector velocidad ΔVE entre el vehículo y el blanco en el marco de referencia terrestre como: ΔVE = Vetarget - VEvehicle, en donde VEtarget representa la velocidad actual del blanco y VEvehicle representa la velocidad actual del vehículo en el marco de referencia terrestre;
calcular (706) un vector velocidad ΔVC entre el vehículo y el blanco en el marco de referencia del dispositivo transformando el vector velocidad ΔVE al marco de referencia del dispositivo ΔVC = CCEΔVE; y
calcular (707) un vector de velocidad normalizado 107 como
en donde el vector de velocidad normalizado indica la velocidad angular a la que el dispositivo ha de moverse en las direcciones de escaneo e inclinación para compensar la velocidad relativa entre el vehículo y el blanco; y
mantener la línea de visión del dispositivo combinando la velocidad angular calculada y la orientación cuando la altitud del vehículo cambia relativa a la posición actual del blanco, incluyendo establecer un ajuste A para el dispositivo en donde y en donde W representa el factor de peso basado al menos en parte en la precisión de las medidas utilizadas para calcular la velocidad angular y la orientación.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2004/001206.
Solicitante: INSITU, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 118 EAST COLUMBIA RIVER WAY BINGEN, WA 98605 ESTADOS UNIDOS DE AMERICA.
Inventor/es: MERCADAL, MATHIEU, VONFLOTOW,Andreas H.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16M1/00 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16M BASTIDORES, CARCASAS O BANCADAS PARA MOTORES, MAQUINAS O APARATOS, NO ESPECIFICOS PARA MOTORES, MAQUINAS O APARATOS PREVISTOS EN OTRO LUGAR; APOYOS; SOPORTES. › Bastidores o carcasas de motores, máquinas o aparatos; Bastidores que sirven de bancadas de apoyo de máquinas.
- G03B15/00 FISICA. › G03 FOTOGRAFIA; CINEMATOGRAFIA; TECNICAS ANALOGAS QUE UTILIZAN ONDAS DISTINTAS DE LAS ONDAS OPTICAS; ELECTROGRAFIA; HOLOGRAFIA. › G03B APARATOS O DISPOSITIVOS PARA HACER FOTOGRAFIAS, PARA PROYECTARLAS O VERLAS; APARATOS O DISPOSITIVOS QUE UTILIZAN TECNICAS ANALOGAS UTILIZANDO ONDAS DIFERENTES DE LAS ONDAS OPTICAS; SUS ACCESORIOS (partes ópticas de estos aparatos G02B; materiales fotosensibles para la fotografía o procedimientos fotográficos G03C; aparellaje para el tratamiento de materiales fotosensibles después de la exposición G03D). › Procedimientos especiales para hacer fotografías; Aparatos para este efecto.
- G05D3/12 G […] › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 3/00 Control de la posición o de la dirección (G05D 1/00 tiene prioridad; control de programa numérico G05B 19/18). › utilizando realimentación.
- G06T1/00 G […] › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Tratamiento de datos de imagen, de aplicación general.
- G06T7/20 G06T […] › G06T 7/00 Análisis de imagen. › Análisis del movimiento (estimación del movimiento para codificación, decodificación, compresión o descompresión de señales de vídeo digitales H04N 19/43, H04N 19/51).
- H04N5/232 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › H04N 5/00 Detalles de los sistemas de televisión (Detalles de los dispositivos de análisis o sus combinaciones con la producción de la tensión de alimentación H04N 3/00). › Dispositivos para el control de las cámaras de televisión, p. ej. control a distancia (H04N 5/235 tiene prioridad).
- H04N7/18 H04N […] › H04N 7/00 Sistemas de televisión (detalles H04N 3/00, H04N 5/00; métodos y arreglos, para la codificación, decodificación, compresión o descompresión de señales de vídeo digital H04N 19/00; distribución selectiva de contenido H04N 21/00). › Sistemas de televisión en circuito cerrado, es decir, sistemas en los cuales la señal no es difundida.
PDF original: ES-2375935_T3.pdf
Fragmento de la descripción:
Sistema de compensación de velocidad de sobrevuelo durante la estabilización de una cámara aerotransportada.
La tecnología descrita se refiere a un aparato para la estabilización de la dirección en que apunta una cámara aerotransportada.
La dirección en que apunta o línea de visión de una cámara aerotransportada fijada en el cuerpo de una aeronave se mueve correspondientemente cuando la aeronave realiza una maniobra. Por ejemplo, cuando la aeronave voltea, la cámara voltea hacia arriba o hacia abajo dependiendo en qué lado de la aeronave esté montada. Si la cámara se estabiliza inercialmente, en vez de estar fijada en el cuerpo de la aeronave, su línea de visión permanecerá en una dirección fija relativa al cuerpo de la aeronave mientras la aeronave maniobra. Cuando la cámara se estabiliza inercialmente, su campo de visión barre a través de una escena a una velocidad igual a la velocidad de sobrevuelo de la aeronave. Por ejemplo, si la cámara apunta directamente hacia abajo con su escáner alineado con el cuerpo de la aeronave y la aeronave está viajando a 360 mph y si el campo de visión de la cámara es una milla, entonces un objeto entrando en el campo de visión puede salir del campo de visión en 10 segundos.
La estabilización inercial se efectúa típicamente montando una cámara aerotransportada con un sistema de suspensión carda, y guiando la suspensión cardan en base al roll, el pitch y el heading de la aeronave. Tal montaje puede resultar en un direccionamiento estabilizado de alta calidad, pero la velocidad de sobrevuelo de la aeronave no se elimina. Las entradas del operador se utilizan para realizar cambios en la línea de visión para compensar la velocidad de sobrevuelo. Tales sistemas están descritos en las patentes US5897223; US3638502; US4989466; US4643539; y US5184521. La figura 1 ilustra una técnica anterior que no corrige la velocidad de sobrevuelo de la aeronave sobre el blanco. En dicha técnica anterior, la línea de visión de la cámara se estabiliza inercialmente. En este ejemplo, cuando la aeronave 100 realiza círculos 101, la línea de visión de la cámara barre un círculo 102. La estabilización barre el área de la imagen a través del suelo a una velocidad igual a la velocidad de sobrevuelo de la aeronave. Para compensar la velocidad de sobrevuelo, el operador tendría que mantener manualmente la cámara apuntando al blanco.
US-A-5967458 describe un aparato que permite a un proyectil seguir un objeto, en donde el objeto se mueve relativamente al proyectil. El proyectil incluye un cuerpo que generalmente está definido por la carcasa del proyectil. Se le añade una plataforma al cuerpo para permitir el movimiento relativo entre el cuerpo y la plataforma. Se añade un giroscopio a la plataforma para permitir el movimiento relativo entre giroscopio y plataforma. Un controlador genera comandos de control para desplazar el giroscopio y la plataforma para seguir el objeto. El controlador desplaza en primer lugar el giroscopio a una orientación predeterminada de acuerdo con la posición del objeto. El controlador genera entonces comandos de control para desplazar la plataforma para alinear la plataforma con el giroscopio en una orientación predeterminada.
GB-A-1116801 describe un misil guiado hacia un blanco mediante señales de radio desde un centro de comando separado. El misil lleva una cámara de TV fija que transmite, al centro, señales correspondientes a la posición angular del blanco relativa al eje longitudinal del misil.
US-A-5347910 describe un sistema de adquisición de blancos para un sistema ligero de defensa aéreo. Un sistema de proyección proyecta una retícula en un cristal de visión y un proyector de retícula se conecta comandado por un sensor/buscador de infrarrojos que se utiliza en el misil, y/o un scanner/buscador infrarrojo hacia adelante (FLIR). La proyección en el cristal también informa a la persona que dispara hacia donde apunta el scanner/buscador infrarrojo suelto en relación con la dirección en la que la persona que dispara está viendo la torreta para asegurar que el misil y la torreta están apuntando hacia el mismo blanco. El scanner/buscador FLIR está montado en uno de los brazos de la munición y apuntando en la misma dirección que los misiles montados en que los brazos de munición apuntan. La señal del scanner/buscador FLIR puede ser utilizada en un modo de búsqueda automático para dirigir los motores de la cabina y el brazo. Durante la búsqueda manual y cuando se inicia la búsqueda automática, la electrónica de control obtiene señales de forma continua y almacena los valores de búsqueda de elevación y azimut.
Por tanto, es un objetivo de la presente invención el proporcionar un procedimiento mejorado para controlar la orientación de un dispositivo que está montado en un vehículo en movimiento para que permanezca fijo en un blanco, así como el correspondiente sistema y programa de ordenador en un medio de almacenaje.
Este objetivo se cumple mediante la materia de las reivindicaciones independientes.
Realizaciones preferidas se definen mediante las reivindicaciones dependientes.
La compensación automática de la velocidad de sobrevuelo de una aeronave provoca que la línea de visión permanezca fija en una posición seleccionada relativa al suelo. Si el sistema de suspensión cardan realiza esta compensación automáticamente, entonces el operador se ve exento de tener que hacerlo él mismo.
Figuras
La Figura 1 ilustra una técnica conocida que requiere que el operador corrija la velocidad de sobrevuelo de la aeronave hacia el blanco.
La Figura 2 ilustra un sistema de compensación en donde la línea de visión de la cámara no está inercialmente estabilizada sino que se le da una velocidad angular.
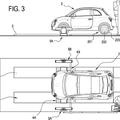
La Figura 3 ilustra el efecto de esta compensación en la secuencia de imágenes creada por la cámara.
La Figura 4 ilustra como se calcula la velocidad angular de la línea de visión requerida.
La Figura 5 es un diagrama que ilustra los marcos de referencia utilizados en el sistema de compensación.
La Figura 6 es un diagrama de flujo que ilustra el procesamiento de un componente que establece la posición del blanco en un ejemplo.
La Figura 7 es un diagrama de flujo que ilustra el procesamiento de un componente que fija el blanco en una realización.
Descripción detallada
Se proporciona un procedimiento y un sistema para mantener la línea de visión de una cámara aerotransportada fijada en un blanco compensando la velocidad de sobrevuelo de la aeronave. El sistema de compensación comanda automáticamente una velocidad angular de la línea de visión para mantener la cámara apuntando al blanco (p.ej., una localización seleccionada en el suelo) que se está sobrevolando. Esta velocidad angular de la línea de visión se computa basándose en la velocidad de sobrevuelo de la aeronave y en un vector desde la aeronave hacia el blanco. Esta compensación automática para la velocidad de sobrevuelo de la aeronave provoca que la línea de visión permanezca fijada en un blanco. El sistema de compensación guía un sistema de suspensión cardan en el que se monta la cámara para realizar la compensación automáticamente. Como resultado de ello, la cámara puede permanecer apuntando al blanco sin necesidad de intervención del operador.
En una realización, el sistema de compensación calcula los radianes por segundo en las direcciones de escaneo e inclinación que la cámara necesita mover para compensar la velocidad de sobrevuelo de la aeronave. El sistema de compensación calcula periódicamente (p.ej., 20 veces por segundo) los radianes y ajusta el control angular del gyro del sistema de suspensión cardan. El sistema de compensación calcula tanto el ajuste estático como el dinámico. El ajuste estático representa la diferencia en radianes entre la línea de visión actual de la cámara y la línea de visión de la cámara necesaria basándose en las posiciones actuales de la aeronave y el blanco. El ajuste dinámico representa los radianes por segundo que la cámara necesita mover para compensar la velocidad de sobrevuelo. El sistema de compensación combina los ajustes estáticos y dinámicos para realizar el ajuste actual. Los ajustes dinámicos permiten realizar ajustes suaves y continuos basados en la velocidad, mientras que los ajustes estáticos tienden a corregir los errores acumulados en la línea de visión. El sistema de compensación puede aplicar un factor de peso a los... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para controlar la orientación de un dispositivo para que permanezca fijado en un blanco (302), estando el dispositivo en un vehículo (200; 300) que se mueve a una velocidad relativa a la posición actual del blanco, en donde el procedimiento comprende:
establecer una orientación inicial para el dispositivo que se apunta en la posición actual del blanco;
calcular (701) una matriz de transformación CCE para transformar de un marco de referencia terrestre a un marco de referencia de dispositivo;
calcular y establecer la orientación del dispositivo periódicamente, en donde calcular la orientación incluye,
calcular (702) un vector de posición ΔRE entre el vehículo y el blanco en el marco de referencia terrestre como: ΔRE = RE}target - REvehicle, en donde REtarget representa la posición actual del blanco y REvehicle representa la posición actual del vehículo;
calcular (703) un vector de posición ΔRC entre el vehículo y el blanco en el marco de referencia del dispositivo transformando el vector posición ΔRE al marco de referencia de dispositivo ΔRC = CCEΔRE; y
calcular (704) un vector de posición normalizado  ,
,
en donde el vector de posición normalizado indica la diferencia entre una línea de visión actual del dispositivo y una línea de visión necesaria para apuntar al blanco en las direcciones del escaneo e inclinación;
calcular y establecer una velocidad angular periódicamente para mover el dispositivo en las direcciones de escaneo e inclinación basado en la posición actual del dispositivo para compensar la velocidad relativa entre el vehículo y el blanco, en donde calcular la velocidad angular incluye,
calcular (705) un vector velocidad ΔVE entre el vehículo y el blanco en el marco de referencia terrestre como: ΔVE = Vetarget - VEvehicle, en donde VEtarget representa la velocidad actual del blanco y VEvehicle representa la velocidad actual del vehículo en el marco de referencia terrestre;
calcular (706) un vector velocidad ΔVC entre el vehículo y el blanco en el marco de referencia del dispositivo transformando el vector velocidad ΔVE al marco de referencia del dispositivo ΔVC = CCEΔVE; y
calcular (707) un vector de velocidad normalizado 
en donde el vector de velocidad normalizado indica la velocidad angular a la que el dispositivo ha de moverse en las direcciones de escaneo e inclinación para compensar la velocidad relativa entre el vehículo y el blanco; y
mantener la línea de visión del dispositivo combinando la velocidad angular calculada y la orientación cuando la altitud del vehículo cambia relativa a la posición actual del blanco, incluyendo establecer un ajuste A para el dispositivo en donde  y en donde W representa el factor de peso basado al menos en parte en la precisión de las medidas utilizadas para calcular la velocidad angular y la orientación.
y en donde W representa el factor de peso basado al menos en parte en la precisión de las medidas utilizadas para calcular la velocidad angular y la orientación.
2. Procedimiento de acuerdo con la reivindicación 1 en donde el blanco (302) está en una posición fija.
3. Procedimiento de acuerdo con la reivindicación 1 en donde el dispositivo es una cámara.
4. Procedimiento de acuerdo con la reivindicación 1 en donde en donde el vehículo es una aeronave (200; 300).
5. Procedimiento de acuerdo con la reivindicación 1 en donde el vehículo es terrestre.
6. Procedimiento de acuerdo con la reivindicación 1 en donde la orientación inicial del dispositivo se fija basándose en un operador que centra la orientación del dispositivo hacia el blanco (302).
7. Procedimiento de acuerdo con la reivindicación 6 que incluye calcular la posición actual del blanco basándose en la posición actual del vehículo y la diferencia de altitud entre la posición actual del vehículo (200; 300) y la posición actual del blanco (302).
8. Procedimiento de acuerdo con la reivindicación 1 en donde la orientación inicial del dispositivo se fija basándose en la posición actual del blanco (302) y la posición actual y la altitud del vehículo (200; 300).
9. Procedimiento de acuerdo con la reivindicación 1 en donde se utiliza un giroscopio para mantener la orientación del dispositivo a medida que el vehículo (200; 300) maniobra.
10. Sistema para controlar la orientación de un dispositivo para permanecer fijado en un blanco (302), estando el dispositivo en un vehículo (200; 300) que se mueve a una velocidad relativa a un blanco, en donde el sistema comprende:
un componente configurado para establecer una orientación inicial para el dispositivo de manera que se apunta hacia el blanco;
un componente configurado para calcular una matriz de transformación CCE para transformar de un marco de referencia terrestre a un marco de referencia de dispositivo;
un componente configurado para calcular y establecer la orientación del dispositivo periódicamente, en donde calcular la orientación incluye,
calcular (702) un vector de posición ΔRE entre el vehículo y el blanco en el marco de referencia terrestre como: ΔRE = REtarget - REvehicle, en donde REtarget representa la posición actual del blanco y REvehicle representa la posición actual del vehículo;
calcular (703) un vector de posición ΔRC entre el vehículo y el blanco en el marco de referencia del dispositivo transformando el vector posición ΔRE al marco de referencia de dispositivo ΔRC = CCEΔRE; y
calcular (704) un vector de posición normalizado  ,
,
en donde el vector de posición normalizado indica la diferencia entre una línea de visión actual del dispositivo y una línea de visión necesaria para apuntar al blanco en las direcciones del escaneo e inclinación;
un componente configurado para calcular y establecer una velocidad angular periódicamente para mover el dispositivo en las direcciones de escaneo e inclinación basado en la posición actual del dispositivo para compensar la velocidad relativa entre el vehículo y el blanco, en donde calcular la velocidad angular incluye,
calcular (705) un vector velocidad ΔVE entre el vehículo y el blanco en el marco de referencia terrestre como: ΔVE = VEtarget - VEvehicle, en donde VEtarget representa la velocidad actual del blanco y VEvehicle representa la velocidad actual del vehículo en el marco de referencia terrestre;
calcular (706) un vector velocidad ΔVC entre el vehículo y el blanco en el marco de referencia del dispositivo transformando el vector velocidad ΔVE al marco de referencia del dispositivo como ΔVC = CCEΔVE; y
calcular (707) un vector de velocidad normalizado  ,
,
en donde el vector de velocidad normalizado indica la velocidad angular a la que el dispositivo ha de moverse en las direcciones de escaneo e inclinación para compensar la velocidad relativa entre el vehículo y el blanco; y
un componente configurado para mantener la línea de visión del dispositivo combinando la velocidad angular calculada y la orientación cuando la altitud del vehículo cambia relativa a la posición actual del blanco, incluyendo establecer un ajuste A para el dispositivo en donde  y en donde W representa el factor de peso basado al menos en parte en la precisión de las medidas utilizadas para calcular la velocidad angular y la orientación.
y en donde W representa el factor de peso basado al menos en parte en la precisión de las medidas utilizadas para calcular la velocidad angular y la orientación.
11. Sistema de acuerdo con la reivindicación 10 en donde el blanco (302) está en movimiento.
12. Sistema de acuerdo con la reivindicación 10 en donde el dispositivo es una cámara.
13. Sistema de acuerdo con la reivindicación 10 en donde el vehículo es una aeronave (200; 300).
14. Sistema de acuerdo con la reivindicación 10 en donde el vehículo es espacial.
15. Sistema de acuerdo con la reivindicación 10 en donde la orientación inicial del dispositivo se establece basada en un operador que centra la orientación del dispositivo en el blanco (302).
16. Sistema de acuerdo con la reivindicación 15 en donde una posición inicial del blanco (302) se calcula basada en una posición inicial del vehículo (200; 300) y una diferencia de altitud inicial entre el vehículo y el blanco.
17. Sistema de acuerdo con la reivindicación 10 en donde la orientación inicial del dispositivo se establece basada en la posición actual del blanco (302) y la posición actual del vehículo (200; 300).
18. Sistema de acuerdo con la reivindicación 10 en donde se utiliza un giroscopio para mantener la orientación del dispositivo mientras el vehículo (200; 300) maniobra.
19. Sistema de acuerdo con la reivindicación 10 en donde la velocidad angular es la velocidad angular de un sistema de suspensión cardan en el que el dispositivo está montado.
20. Medio de almacenamiento de programa de ordenador que comprende instrucciones para controlar un dispositivo para fijar en un blanco, en donde el dispositivo está en un vehículo (200; 300) y estando inicialmente orientado hacia el blanco (302), mediante un procedimiento que comprende:
establecer una orientación inicial para el dispositivo que se apunta en la posición actual del blanco;
calcular (701) una matriz de transformación CCE para transformar de un marco de referencia terrestre a un marco de referencia de dispositivo;
calcular y establecer la orientación del dispositivo periódicamente, en donde calcular la orientación incluye,
calcular (702) un vector de posición ΔRE entre el vehículo y el blanco en el marco de referencia terrestre como: ΔRE = REtarget - REvehicle en donde REtarget representa la posición actual del blanco y REvehicle representa la posición actual del vehículo;
calcular (703) un vector de posición ΔRC entre el vehículo y el blanco en el marco de referencia del dispositivo transformando el vector posición ΔRE al marco de referencia de dispositivo ΔRC = CCEΔRE; y
calcular (704) un vector de posición normalizado  ,
,
en donde el vector de posición normalizado indica la diferencia entre una línea de visión actual del dispositivo y una línea de visión necesaria para apuntar al blanco en las direcciones del escaneo e inclinación;
calcular y establecer una velocidad angular periódicamente para mover el dispositivo en las direcciones de escaneo e inclinación para compensar la velocidad relativa entre el vehículo y el blanco, en donde calcular la velocidad angular incluye,
calcular (705) un vector velocidad ΔVE entre el vehículo y el blanco en el marco de referencia terrestre como: ΔVE = VEtarget - VEvehicle, en donde VEtarget representa la velocidad actual del blanco y VE_{vehicle representa la velocidad actual del vehículo en el marco de referencia terrestre;
calcular (706) un vector velocidad ΔVC entre el vehículo y el blanco en el marco de referencia del dispositivo transformando el vector velocidad ΔVE al marco de referencia del dispositivo ΔVC = CCEΔVE; y
calcular (707) un vector de velocidad normalizado 
en donde el vector de velocidad normalizado indica la velocidad angular a la que el dispositivo ha de moverse en las direcciones de escaneo e inclinación para compensar la velocidad relativa entre el vehículo y el blanco; y
mantener la línea de visión del dispositivo combinando la velocidad angular calculada y la orientación cuando la altitud del vehículo cambia relativa a la posición actual del blanco, incluyendo establecer un ajuste A para el dispositivo en donde  y en donde W representa el factor de peso basado al menos en parte en la precisión de las medidas utilizadas para calcular la velocidad angular y la orientación.
y en donde W representa el factor de peso basado al menos en parte en la precisión de las medidas utilizadas para calcular la velocidad angular y la orientación.
21. Medio de almacenamiento de programa de ordenador de acuerdo con la reivindicación 20 en donde el cálculo del ajuste de la velocidad angular se realiza en un intervalo de tiempo.
22. Medio de almacenamiento de programa de ordenador de acuerdo con la reivindicación 21 en donde el ajuste de la velocidad angular es un ratio de ajuste que se aplica de forma continua durante un intervalo de tiempo.
23. Medio de almacenamiento de programa de ordenador de acuerdo con la reivindicación 20 en donde el cálculo de la orientación se realiza en un intervalo de tiempo.
24. Medio de almacenamiento de programa de ordenador de acuerdo con la reivindicación 23 en donde la orientación se ajuste una vez cada intervalo de tiempo.
Patentes similares o relacionadas:
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]
CONFIGURACIÓN Y VISUALIZACIÓN DE UNA INTERFAZ DE USUARIO CON ESTUDIOS DE ATENCIÓN SANITARIA, del 22 de Mayo de 2020, de FUJIFILM MEDICAL SYSTEMS USA INC: Configuración y visualización de una interfaz de usuario con estudios de atención sanitaria. Método y aparato para configurar y visualizar una interfaz de […]
Dispositivo y procedimiento de generación de imágenes de guía utilizando parámetros, del 13 de Mayo de 2020, de CJ CGV Co., Ltd: Un dispositivo de generación de imágenes de guía que comprende: una unidad de generación de imágenes de guía configurada para generar una imagen […]
Procedimiento y sistema para la calibración de un sistema de visión por ordenador, del 1 de Abril de 2020, de Oy Mapvision Ltd: Procedimiento para la calibración de un sistema de visión por ordenador tridimensional, comprendiendo dicho procedimiento las etapas de: disponer […]
Marcado remoto de pasaporte y documento de seguridad, del 29 de Enero de 2020, de SICPA HOLDING SA: Un sistema para marcar remotamente un documento de seguridad, tal como un pasaporte , con un correspondiente sello, etiqueta o visado virtual, que comprende: - una […]
Sistema y método de orientación automatizada para una máquina de movimientos coordinados, del 8 de Enero de 2020, de Recognition Robotics, Inc: Un método de orientación automatizada, que comprende: tomar una imagen inicial de una pluralidad de piezas de trabajo (Wa, Wb, Wc) de forma similar con una cámara […]
Imágenes en línea seguras, del 4 de Diciembre de 2019, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un dispositivo de generación de imágenes seguras para proteger una imagen , comprendiendo el dispositivo de generación de imágenes seguras: un […]
 Método y aparato para comprobar neumáticos de rueda de vehículo, del 25 de Septiembre de 2019, de NEXION S.p.A: Un método para comprobar los neumáticos en las ruedas de un vehículo que comprende las etapas siguientes:
- cuando el vehículo está […]
Método y aparato para comprobar neumáticos de rueda de vehículo, del 25 de Septiembre de 2019, de NEXION S.p.A: Un método para comprobar los neumáticos en las ruedas de un vehículo que comprende las etapas siguientes:
- cuando el vehículo está […]