SERVOMANDO PARA EL CONTROL DE VEHÍCULOS.
Servocomando para el control de vehículos, elementos de tracción o embarcaciones,
así como cualquier elemento susceptible de posicionamiento ubicado en los mismos, mediante un mando electromecánico que proporciona y recibe informaciones para el control del movimiento o posicionamiento del vehículo.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200902013.
Solicitante: UNIVERSITAT POLITECNICA DE CATALUNYA.
Nacionalidad solicitante: España.
Inventor/es: PINDADO RICO,RAFAEL, BOSCH TOUS, RICARD, GARCÍA CALVETE,JULIO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60K31/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60K DISPOSICIONES O MONTAJE DE CONJUNTOS DE PROPULSION O DE TRANSMISIONES SOBRE VEHICULOS; DISPOSICIONES O MONTAJE DE VARIOS MOTORES PRINCIPALES DIFERENTES EN VEHÍCULOS; ACCIONAMIENTOS AUXILIARES PARA VEHICULOS; INSTRUMENTACION O TABLEROS DE A BORDO DE VEHICULOS; DISPOSICIONES DE CONJUNTOS DE PROPULSION SOBRE VEHICULOS, RELATIVAS A LA REFRIGERACION, A LA ADMISION DE AIRE, AL ESCAPE DE GASES O A LA ALIMENTACION DE CARBURANTE. › B60K 31/00 Accesorios actuantes únicamente sobre una sola subunidad, para el control automático de la velocidad, p.ej. prevenir que la velocidad sobrepase un valor determinado o mantener una velocidad particular, seleccionada por el conductor del vehículo (accesorios actuantes sobre dos o más subunidades B60W 30/14; control del conjunto de propulsión en sí ver las clases o subclases apropiadas, p. ej. F02D; indicadores de velocidad G01P; sistemas o dispositivos para controlar la velocidad en general G05D 13/00). › y medios para comparar una variable eléctrica, p. ej. voltaje, impulso, forma de onda, flujo o similar con otra variable de la misma clase, los medios de comparación desarrollan una señal eléctrica con la que se alimentan los medios de control.
- G05B13/02 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 13/00 Sistemas de control adaptativos, es decir, sistemas que se regulan a sí mismos para obtener un rendimiento óptimo siguiendo un criterio predeterminado (G05B 19/00 tiene prioridad; aprendizaje automático G06N 20/00). › eléctricos.
- G05D3/12 G05 […] › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 3/00 Control de la posición o de la dirección (G05D 1/00 tiene prioridad; control de programa numérico G05B 19/18). › utilizando realimentación.
Fragmento de la descripción:
braciones mecánicas, por ejemplo cerca del motor del Servomando para el control de vehículos.
Sector de la técnica La presente invención concierne en general a un dispositivo electromecánico para el control del movimiento de vehículos, y en particular un dispositivo que comprende un accionamiento servocontrolado y un codificador de posición acoplados sobre un mando mecánico accesible por el operador. Estado de la técnica anterior Son conocidas diversas propuestas relativas a métodos y aparatos cuyo fin es el de proporcionar consignas eléctricas de control para el movimiento de vehículos y, en general, cualquier dispositivo móvil tanto analógicas como digitales.
Tradicionalmente, la consigna y gobierno de motores se realizaba mediante el control de la energía que excitaba el motor. Actualmente, mediante la utilización de electrónica de potencia es posible el control del accionamiento mediante consignas eléctricas, analógicas o digitales, de control. Los beneficios consisten en una mayor eficiencia de energía y una mayor precisión y seguridad de operación.
Como ejemplos, se puede citar el mando de control de grúas hidráulicas, el control del accionamiento de trenes o tranvías, así como todo tipo de accionamiento mecánico cuya función es la de proporcionar las consignas de control para el movimiento de vehículos o el posicionamiento de diversas partes mecánicas. Un inconveniente asociado a la mayoría de estos mandos es que el retorno a la posición neutral así como la dureza del mando se realiza mediante elementos puramente mecánicos que no permiten configuración dinámica de su comportamiento ni de su posición de reposo.
En la patente WO2008/092274, se describe un aparato y sistema destinado al control de la aceleración y deceleración de vehículos. El dispositivo contempla un pedal con una posición neutra y se puede mover entre dos posiciones opuestas para producir la señal correspondiente a cero en el punto neutral y positiva o negativa dependiendo del movimiento entorno a dicha posición. Esta señal actúa sobre los elementos de potencia.
Hasta la fecha, la acción sobre la consigna se traduce directamente en una reacción por parte del sistema, desprovista de supervisión. Esta supervisión aumenta la seguridad de operación del conjunto. Explicación de la invención
Es necesario ofrecer una alternativa al estado de la técnica que solvente los inconvenientes de los que adolecen los aparatos y métodos convencionales de control.
La presente invención tiene por objeto ofrecer un sistema de control de vehículos que mejora las prestaciones y versatilidad de los actuales.
Estas mejoras son la configurabilidad de los límites del rango de trabajo, el tipo de reacción mecánica del mando a la actuación del operador, la posibilidad de variar la posición de reposo, así como el control del mando a partir de consignas eléctricas. Además, se ofrece la posibilidad de disponer de un mando multipunto. Es decir, el control del sistema desde varios mandos de forma indistinta, con más o menos prestaciones.
Otra finalidad de la invención es obtener un sistema compacto, robusto y fiable que pueda operar en vehículo.
El servomando objeto de la invención, se conecta al sistema a controlar mediante señales puramente eléctricas, sin existir ningún vínculo mecánico entre el sistema de mando y el sistema de tracción del vehículo. Descripción breve de las figuras
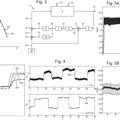
Para la mejor comprensión de otros objetos o méritos de la invención se acompañan dos ilustraciones relativas a la constitución básica del mismo. Estas figuras deben tomarse a título ilustrativo y no limitativo en los que la Fig. 1 es un diagrama de bloques del conjunto y la Fig. 2 es un diagrama de bloques del servomotor mencionado en la Fig. 1. Descripción detallada del objeto de la invención
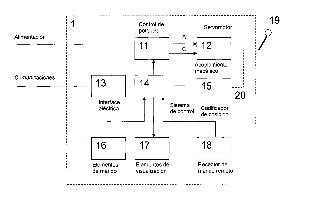
Referido a la Fig. 1, el servomando propuesto está ubicado en una bastidor 1 que contiene la totalidad de elementos eléctricos, electrónicos y mecánicos que lo constituyen y que son los siguientes:
Servomotor 12, detallado en la Fig. 2, cuyo objeto es el de proporcionar una posición de referencia para el servomando.
1. Bastidor o caja que constituye el servomando.
11. Control de potencia del servomotor. El par del motor es controlable a partir de consignas enviadas por el sistema de control. Este control de potencia actúa directamente sobre el servomotor 12 mediante las señales A de alimentación y C de control.
12. Servomotor. Actúa bajo las órdenes enviadas por el módulo de control de potencia posicionando el mando 19 en la posición deseada. Dispone de control de par motor o resistente.
El servomotor, detallado en la Fig. 2, está ubicado en un bastidor 2 y dispone de un convertidor de los pulsos de control en una tensión de referencia (21) , que proporciona la información de posición deseada a un comparador (22) . La señal de error proporcionada por el comparador (22) se amplifica mediante el bloque amplificador (23) y se envía a un modulador y controlador de potencia del motor (24) , que está conectado eléctricamente con el motor (25) . Este motor está unido rígidamente a un sistema de reducción mecánica (26) que finaliza en un elemento externo de posición (28) , que normalmente dispone de un ángulo de posición de +-90º . El acoplamiento mecánico, posiciona simultáneamente un potenciómetro, que proporciona la tensión proporcional a la posición real. Esta señal de posición real, se envía al comparador (22) , para cerrar el lazo de control del sistema.
13. Interface eléctrica de comunicaciones. Posibilita la conexión a las redes de comunicación normalizadas usadas para el control del vehículo. Entre otras, pueden ser CAN ®, RS-232, bucles de corriente, etc. Opcionalmente puede disponer de puertos adicionales para diagnóstico y configuración.
14. Sistema de control. Es el núcleo del sistema, almacena las configuraciones, parámetros y modos de operación, controla los elementos de salida como servomotor (12) , elementos de visualización (17) como displays, indicadores luminosos, etc., lee los elementos de mando (16) como señales de entrada, tanto de teclado o codificador digital, así como la posición del servomando (19) a través del codificador de posición (15) . Además, lee las órdenes recibidas de los posibles mandos remotos a través del receptor de mando remoto (18) .
3 ES 2359308A1 4
15. Dispone de un codificador de posición (15) , que proporciona información sobre la posición real del mando (19) .
16. El servomando puede contener un conjunto de teclas o interruptores para configurar su operación, y uno o más codificadores de posición para entrada de parámetros.
17. El servomando puede disponer además de elementos de visualización como indicadores luminosos
o pantallas, alfanuméricas o gráficas de operación. En estos dispositivos se muestra tanto el estado de operación, como los parámetros de operación y la configuración del sistema.
18. Opcionalmente, es posible controlar de forma remota el servomando a partir de controles remotos, bien para actuar en caso de alarma, forzar la parada, o programar configuraciones almacenadas previamente en la configuración del sistema, entre otras posibles funcionalidades.
19. El servomando dispone de un mando mecánico, accesible por el operador y accionado también por el servomotor, para llevarlo a la posición de reposo, u ofrecer un par resistente al operador.
20. Un acoplamiento mecánico (20) , enlaza el mando externo (19) posicionado por el operador, o por el servomotor (12) , con el codificador de posición (15) .
Modo de operación
Tras su conexión, el sistema de control del servomando recupera los parámetros de operación almacenados y si la configuración lo requiere realiza las funciones de autotest y calibración, definiendo los límites de operación. Luego va a la posición de reposo programada.
El sistema controla electrónicamente la fuerza que ejerce sobre el mando mecánico (19) que es accesible por el propio mando o por el operador, posibilitando de este modo, el retorno a la posición de reposo, o bien permite el control por parte del operador.
El hecho de que la posición de reposo sea parametrizable, amplía las posibilidades de control del sistema, ya que en cada momento se puede configurar de forma que el rango de acción sea el máximo dependiendo de la función a realizar.
También es posible eliminar la función de retorno a posición de reposo,...
Reivindicaciones:
1. Sistema servomando para el control de vehículos, elementos de tracción o embarcaciones, así como cualquier elemento susceptible de posicionamiento ubicado en los mismos, en adelante vehículo, mediante un mando electromecánico que proporciona y recibe informaciones para el control del movimiento o posicionamiento del vehículo del tipo que comprende:
- un servomotor (12) ligado a una alimentación
(A) y a un control (C) provenientes de un módulo de potencia (11) y un mando mecánico (19, 28) , que dicho servomotor (12) contiene un convertidor de pulsos a tensión (21) cuya señal se añade con un restador (22) a la realimentación resultado de la señal procesada por una cadena formada por un amplificador (23) seguido de un driver y control de potencia de motor (24) seguido del motor (25) seguido de una reducción mecánica (26) que se manipula a través de un mando mecánico (19, 28) y una reducción mecánica (26) a un codificación de posición (27) que se realimenta (22) , estando dicho servomotor (12) doblemente realimentado a través del acoplamiento mecánico (20) que da señal a un codificador de posición (15) que informa a un sistema de control (14) que, a su vez, cierra el segundo lazo de realimentación a través del control de potencia (11) , controlado a través del sistema de control (14) que informa de su estado a través de elementos de visualización (17) o a través del bus de comunicaciones y también permite dar consignas por su conexión a través de la interfaz eléctrica (13)
2. Sistema definido según la reivindicación 1 que comprende dos o más mandos para el control multipunto y caracterizado porque el mando mecánico móvil (19, 28) , accesible por el operador del sistema en cualquiera de los puntos de mando y que puede modificar manualmente la posición del mando, o bien eléctricamente mediante señales de control externas (16, 18) , a partir del sistema de control del propio mando (14) o a partir de consignas externas provenientes del bus de comunicaciones a través de la interface eléctrica (13) . 3. Sistema según la reivindicación 1, caracterizado porque dicho mando externo (19, 28) proporciona señales indicadoras de la posición física, que se devuelven al módulo de control (14) , de forma que el sistema de control (14) conoce la posición mecánica del mando del sistema (19, 28) . 4. Sistema según la reivindicación 1, caracterizado porque dicho sistema electrónico de control (14) es configurable y contiene memoria volátil para almacenar las variables y consignas dinámicas para el funcionamiento del conjunto, y memoria no volátil para almacenar las configuraciones y parámetros básicos del sistema. 5. Sistema según la reivindicación 1, que envía señales de control (14) a un servosistema (12) que posiciona el elemento mecánico de salida (19) , accesible por el usuario. 6. Sistema según la reivindicación 1, que dispone de uno o más sistemas de comunicaciones (13) para el intercambio de información con el exterior. 7. Sistema según la reivindicación 1 y 4, dónde los parámetros de operación del sistema son accesibles mediante menús de visualización que facilitan la operación y la configuración del servomando, así como la parametrización del sistema mecánico a controlar. 8. Sistema según la reivindicación 1, que dispone adicionalmente de elementos de visualización (17) como indicadores luminosos, pantallas alfanuméricas o gráficas que muestran el estado de operación, configuración, parámetros de operación, o parámetros del vehículo. 9. Sistema según la reivindicación 1, que dispone adicionalmente de diversos mandos auxiliares como pulsadores o interruptores (16) para facilitar la configuración del mando o acceder a menús de funciones. 10. Sistema según la reivindicación 1, que dispone adicionalmente de uno o más receptores de control remoto (18) posibilitando el control a distancia del sistema a partir de mandos remotos mediante enlaces por radiofrecuencia en todas sus variantes (zigbee bluetooth®, etc.) , o mediante un mando a distancia por infrarrojos. OFICINA ESPAÑOLA DE PATENTES Y MARCAS Nº solicitud: 200902013 ESPAÑA Fecha de presentación de la solicitud: 13.10.2009 Fecha de prioridad: INFORME SOBRE EL ESTADO DE LA TECNICA 51 Int. Cl. : Ver Hoja Adicional DOCUMENTOS RELEVANTES INFORME DEL ESTADO DE LA TÉCNICA Nº de solicitud: 200902013 CLASIFICACIÓN OBJETO DE LA SOLICITUD B60K31/04 (2006.01) G05D3/12 (2006.01) G05B13/02 (2006.01) Documentación mínima buscada (sistema de clasificación seguido de los símbolos de clasificación) B60K, G05D, G05B Bases de datos electrónicas consultadas durante la búsqueda (nombre de la base de datos y, si es posible, términos de búsqueda utilizados) INVENES, EPODOC Informe del Estado de la Técnica Página 2/4 Nº de solicitud: 200902013 Fecha de Realización de la Opinión Escrita: 09.05.2011 Declaración Se considera que la solicitud cumple con el requisito de aplicación industrial. Este requisito fue evaluado durante la fase de examen formal y técnico de la solicitud (Artículo 31.2 Ley 11/1986) . La presente opinión se ha realizado sobre la base de la solicitud de patente tal y como se publica. Informe del Estado de la Técnica Página 3/4 Nº de solicitud: 200902013 1. Documentos considerados. A continuación se relacionan los documentos pertenecientes al estado de la técnica tomados en consideración para la realización de esta opinión. 2. Declaración motivada según los artículos 29.6 y 29.7 del Reglamento de ejecución de la Ley 11/1986, de 20 de marzo, de Patentes sobre la novedad y la actividad inventiva; citas y explicaciones en apoyo de esta declaración Reivindicación nº 1 Se establece el documento D01 como el documento más próximo del Estado de la Técnica. El documento D01 hace referencia a un sistema de selección de cambios para una transmisión asistida. Dicho documento contiene: -un motor de combustión interna (22) (ver columna 2, línea. 2. 27; figura 1) . -un circuito de control (4) realimentado desde un sensor de velocidad (8) (ver columna 2, línea. 2. 30; figura 1) . -un sensor (7) de monitorización de la posición del engranaje de la transmisión y transmite una señal de realimentación al circuito de control (4) (ver columna 2, línea. 3. 33; figura 1) . -un selector (5) que permite seleccionar entre varios programas de conducción (ver columna 2, línea. 4. 43; figura 1) . -un sensor de velocidad (21) que monitoriza las posiciones de la palanca de cambio o actuador (2) y las envía al circuito de control (4) (ver columna 2, línea. 4. 45) . La invención reivindicada en la reivindicación nº 1 es un sistema de control de un servomotor que recibe informaciones para el control del movimiento o posicionamiento. La diferencia entre el documento D01 y la reivindicación nº 1 reside en que en D01 no se utiliza un servomotor. El efecto técnico de esta diferencia es ubicar el motor en cualquier posición dentro de su rango de operación y mantenerlo estable en dicha posición. El problema técnico objetivo será como ubicar un motor en cualquier posición dentro de su rango de operación y mantenerlo estable en dicha posición. Este problema y su correspondiente solución se encuentran ya recogidos en el documento D02 que divulga un dispositivo de control de la fuerza de conducción para un vehículo y que contiene un servomotor (4) (ver resumen; figura) . En consecuencia, la reivindicación nº 1 carece de Actividad Inventiva a la vista de lo divulgado en los documentos D01 y D02 (Art 8 LP) . Reivindicaciones nº 2 y 3 El objeto de la invención recogido en las reivindicaciones nº 2 y 3 aparece ya contenido en el documento D01 (ver columna 2, línea. 4. 45) . Por consiguiente, las reivindicaciones nº 2 y 3 carecen de Actividad Inventiva (Art 8 LP) . Reivindicación nº 4 El objeto de la reivindicación nº 4 también aparece contenido en el documento D01 (ver columna 2, línea. 2. 30) . Por lo tanto, la reivindicación nº 4 carece también de Actividad Inventiva (Art 8 LP) . Reivindicación nº 5 El objeto de la reivindicación nº 5 está contenido en D02 (ver resumen; figura) . En consecuencia, la reivindicación nº 5 carece de Actividad Inventiva (Art 8 LP) . Reivindicaciones 6 y 7 La utilización de "sistemas de comunicación con el exterior" y de " menús de visualización" como los citados en las reivindicaciones nº 6 y 7 son técnicas muy conocidas y por lo tanto, obvias para un experto en la materia. Por consiguiente, las reivindicaciones nº 6 y 7 carecen de Actividad Inventiva (Art 8 LP) . Reivindicación nº 8 El objeto de la invención recogido en la reivindicación nº 8 aparece ya en D01 (ver columna 2, línea. 6. 68; figuras 1, 2) . Por lo tanto, la reivindicación nº 8 carece de Actividad Inventiva (Art 8 LP) . Reivindicación nº 9 El objeto de la reivindicación nº 9 aparece recogido en el documento D01 (ver columna 5, líneas 4-6) . En consecuencia la reivindicación nº 8 carece de Actividad Inventiva (Art 8 LP) . Reivindicación nº 10 La utilización de "un sistema de control remoto" como el descrito en la reivindicación nº 10 es una técnica muy conocida y por tanto, obvia para un experto en la materia. Por consiguiente, la reivindicación nº 10 carece también de Actividad Inventiva. Informe del Estado de la Técnica Página 4/4 o también por elementos de mando (16) o un receptor de mando remoto (18) opcional.
ES 2 359 308 A1
OPINIÓN ESCRITA
Base de la Opinión.
OPINIÓN ESCRITA
Falta de Actividad Inventiva
Patentes similares o relacionadas:
Puesta en servicio automática de controlador para convertidores electrónicos de potencia activos trifásicos, del 1 de Julio de 2020, de OTIS ELEVATOR COMPANY: Un sistema para modular un nivel de corriente de salida de un convertidor de potencia bidireccional conectado a una red para garantizar que se proporcione […]
 Sistema de control, del 29 de Abril de 2020, de COVENTRY UNIVERSITY: Un sistema de control para controlar una instalación , comprendiendo el sistema de control un bucle de retroalimentación que incluye un integrador […]
Sistema de control, del 29 de Abril de 2020, de COVENTRY UNIVERSITY: Un sistema de control para controlar una instalación , comprendiendo el sistema de control un bucle de retroalimentación que incluye un integrador […]
Procedimiento y aparato de administración de energía eléctrica y dispositivo electrónico, del 1 de Enero de 2020, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento de administración de energía eléctrica, aplicado en un dispositivo electrónico cargado por un adaptador de alimentación eléctrica […]
MÉTODO DE CONTROL DE UN CONVERTIDOR ELECTRÓNICO CC/CA TRIFÁSICO CON FALLO EN UNA FASE, del 19 de Diciembre de 2019, de UNIVERSIDAD POLITECNICA DE MADRID: Método de control de un convertidor electrónico CC/CA trifásico con fallo en una fase. Se divulga un método de control de un convertidor electrónico de CC/CA trifásico […]
Método y sistema de refrigeración redundante, del 5 de Diciembre de 2019, de Dawes, Warwick Graham Andrew: Un método para implementar un sistema de refrigeración redundante para proporcionar una carga de refrigeración máxima predeterminada para el aire en un espacio acondicionado […]
Método de control de bomba, del 4 de Diciembre de 2019, de Grundfos Holding A/S: Procedimiento de control de bombas para controlar el funcionamiento de un sistema der bombas con al menos dos equipos de bombas , que están dispuestos en paralelo […]
MÉTODO Y SISTEMA DE CONTROL PREDICTIVO DE UN CONVERTIDOR CC/CA, del 2 de Diciembre de 2019, de UNIVERSIDAD POLITECNICA DE MADRID: Método y sistema de control predictivo de un convertidor CC/CA. Se divulga un método y un sistema de control predictivo de un convertidor CC/CA para transmisión […]
Equilibrio de par síncrono en sistemas de múltiples bombas, del 5 de Noviembre de 2019, de ITT Manufacturing Enterprises LLC: Un método de control en un sistema que tiene múltiples bombas (18a-18d), en donde las múltiples bombas (18a-18d) se accionan y funcionan conjuntamente […]