Dispositivo de control para controlar la posición de un cable remolcado sísmico marino.
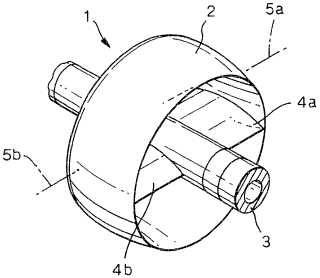
Un dispositivo de control (1) para controlar la posición de un cable remolcado marino,
comprendiendo el dispositivo de control:
una aleta aerodinámica anular (2)
una montura (3) dispuesta para montar la aleta aerodinámica anular sobre y alrededor del cable remolcado; y
medios de control (4a, 4b) dispuestos para controlar la inclinación y/o rotación de la aleta aerodinámica para ajustar la posición lateral y/o profundidad del cable remolcado;
caracterizado porque los medios de control comprenden uno o más alerones (4a, 4b) montados de manera rotativa a lo largo de una cuerda o parte de una cuerda de la aleta aerodinámica anular que pasa a través del centro de la montura (3), y que conecta la montura a la superficie interior de la aleta aerodinámica anular.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2002/003057.
Solicitante: ATLAS ELEKTRONIK UK LIMITED.
Nacionalidad solicitante: Reino Unido.
Dirección: MEADOWS ROAD QUEENSWAY MEADOWS NEWPORT, SOUTH WALES NP19 4SS REINO UNIDO.
Inventor/es: NICHOLSON,James Richard Stephen.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01V1/38 FISICA. › G01 METROLOGIA; ENSAYOS. › G01V GEOFISICA; MEDIDA DE LA GRAVITACION; DETECCION DE MASAS U OBJETOS; MARCAS O ETIQUETAS DE IDENTIFICACION (medios para indicar dónde se encuentran personas sepultadas accidentalmente, p. ej. por la nieve A63B 29/02). › G01V 1/00 Sismología; Prospección o detección sísmica o acústica. › especialmente adaptado a las zonas recubiertas de agua (G01V 1/28 tiene prioridad).
PDF original: ES-2377312_T3.pdf
Fragmento de la descripción:
Dispositivo de control para controlar la posición de un cable remolcado sísmico marino.
Esta invención se refiere a dispositivos de control para controlar la posición de un cable remolcado marino tal como una formación militar remolcada o un cable remolcado sísmico.
Formaciones o hidrófobos sísmicos remolcados son generalmente remolcados detrás de un buque y pueden tener cientos de metros de longitud. Para realizar un estudio sísmico, se remolcan una serie de hidrófobos, paralelos a una profundidad predeterminada por debajo de la superficie del agua. Dispositivos conocidos como “pájaros” (“birds”) se usan para controlar la profundidad del hidrófobo en el agua. Sin embargo, en general, los pájaros de diseños de la técnica anterior no son capaces de corregir la alineación transversal de los hidrófobos, por ejemplo una corriente transversal afecta a la posición de un cable remolcado. Existe el deseo de poder controlar tal alineación transversal de manera que se impida en enredamiento de hidrófobos adyacentes y proporcionar una geometría óptima para la recogida de datos.
Los cables remolcados son generalmente desplegados y recuperados por medio de un chigre o torno. Otro problema de muchos diseños de la técnica anterior es que los pájaros son demasiado voluminosos para permitirles estar permanentemente fijados a los hidrófobos, teniendo necesariamente los pájaros que ser sujetados o retirados de los cables remolcados a intervalos a medida que los cables remolcados son desplegados o recuperados. Además, la estabilidad hidrodinámica de los diseños de la técnica anterior es cuestionable, particularmente después de un periodo de manejo a brazo en el campo.
El problema de controlar la alineación transversal de cables remolcados es en cierto grado aliviado por una propuesta del documento EP-B-0939910, que propone un pájaro que tiene dos alas planas controlables independientemente, configuradas para proporcionar control tanto lateral como transversal.
Sin embargo, el mismo dispositivo está diseñado con una longitud rígida que le impide ser almacenado mientras está unido al cable remolcado.
El documento US 3.893.403 divulga una aleta hidrodinámica en forma de anillo para unión por medio de una brida ajustable a un cable remolcado. La brida y un peso sujeto a la aleta hidrodinámica son ajustables para deprimir o mantener una posición lateral del cable remolcado. El cable remolcado no pasa a través de la aleta hidrodinámica de anillo sino que está sujeto en uso por la brida debajo del cable remolcado. La aleta hidrodinámica en forma de anillo está formada como una aleta aerodinámica con un borde delantero redondeado romo y cuerpo posterior estrechado que termina en un borde trasero. Aletas de compensación pueden estar fijadas a la superficie exterior de la aleta hidrodinámica en anillo para ajustar el paso.
El documento US 2.325.616 divulga un anillo de guarnición con aletas cruzadas circunscritas para la fijación alrededor de un calabrote o cable remolcado para mantener el calabrote o cable a una profundidad constante a lo largo de su longitud. Las aletas están proporcionadas por dos miembros similares, cada uno de los cuales comprende una parte arqueada que define un cuarto de círculo para sujetar alrededor del calabrote o cable que termina en aletas radiales mutuamente ortogonales.
La presente invención se propone aliviar las desventajas de los diseños de la técnica anterior explicados anteriormente.
De acuerdo con u primer aspecto de la presente invención, se proporciona un dispositivo de control según se ha expuesto en la reivindicación 1.
Realizaciones adicionales de la invención se incluyen en las reivindicaciones dependientes.
La montura puede comprender, convenientemente, un árbol hueco posicionado en la aleta aerodinámica anular y que se puede montar de manera rotativa alrededor de un eje longitudinal del cable remolcado. Alternativamente, la montura puede estar permanentemente fijada al cable remolcado y tener una superficie exterior montada de manera rotativa alrededor de la parte fija de la montura. La montura está preferiblemente dispuesta de manera que no esté alineada concéntricamente con la aleta aerodinámica anular. Los medios de control incluyen normalmente uno o más motores para ajustar la posición de rotación o traslación de la aleta aerodinámica anular.
En algunas realizaciones, los alerones tienen un plano de simetría radial al plano del anillo de la alta aerodinámica anular, y la aleta aerodinámica anular puede estar lastrada en una parte de su anillo de manera que hace que el dispositivo, cuando no se apliquen otras cargas, asiente con los montantes en una posición rotacional predeterminada con respecto a la horizontal. Una pluralidad de dispositivos lastrados en diferentes posiciones alrededor del anillo de la aleta aerodinámica anular pueden estar situados a una distancia similar a lo largo de la longitud de cables remolcados adyacentes para ayudar a la separación de los cables remolcados debido al efecto ascensional de los montantes de alerones posicionados rotacionalmente de manera diferente. Cada dispositivo de control puede ser hecho girar alrededor de 2 ejes. Uno esencialmente en alineación con el eje longitudinal del cable remolcado y uno esencialmente ortogonal al mismo (es decir, para inclinar la aleta aerodinámica anular en una dirección hacia delante, hacia atrás, izquierda o derecha) . El movimiento del dispositivo puede ser por ello efectuado en dos dimensiones, una dada por la elevación producida por los montantes de alerones cuando el dispositivo es hecho girar y una segunda producida por la aleta aerodinámica anular cuando se inclina el dispositivo.
Los medios de control incluyen uno o más alerones montados rotativamente entre la montura y la superficie interior de la aleta aerodinámica anular. Convenientemente, un único par de alerones están montados rotativamente en posiciones diametralmente opuestas. La rotación de cada alerón puede ser realizada de manera independiente por un motor. Opcionalmente, los alerones pueden estar conectados funcionalmente a dos salientes, uno que se extiende radialmente hacia fuera desde la superficie exterior de la montura y el otro radialmente hacia dentro desde la superficie interior de la aleta aerodinámica. Opcionalmente, uno del par de alerones está fijado en posición donde se une a la aleta aerodinámica anular y está libre para girar junto a la montura.
Cuando se desee, los medios de control pueden esta configurados para permitir que el par de alerones sean posicionados simultánea e independientemente, por ejemplo, cada uno de un par opuesto puede ser simultáneamente inclinado en el mismo ángulo de incidencia para proporcionar elevación en una dirección única sin rotación. La posición radial de los alerones alrededor del eje longitudinal del cable remolcado puede ser ajustada igualmente por medio de un motor. La rotación de la posición radial de los alerones alrededor del eje longitudinal origina deseablemente una rotación simultánea de la aleta aerodinámica anular alrededor del mismo eje. Alternativamente, los alerones están dispuestos dentro de un armazón o bastidor que puede girar libremente dentro del centro de la aleta aerodinámica anular. El armazón puede, por ejemplo, incorporar un armazón cilíndrico separado de la superficie interior de la aleta aerodinámica anular sólo mediante cojinetes que permiten girar al alerón anular y al armazón cilíndrico independientemente y ser fijados para girar al unísono.
Los motores de control pueden ser convenientemente alimentados por cables eléctricos que pasan a través del cable remolcado y conectados a una fuente de energía en el vehiculo marino que lleva los cables remolcados. Alternativamente, los motores pueden ser alimentados por baterías. Los medios de control pueden ser puramente electromecánicos y ser operados manualmente o, alternativamente, pueden estar conectados con un sistema informático configurado para gestionar el posicionamiento de los cables remolcados dentro del agua. Unos tales medios de control por ordenador pueden comprender además un sistema de transductores para vigilar la posición real de los cables remolcados y de los componentes del dispositivo de control.
Se ha de entender que para los fines de esta invención, la expresión aleta aerodinámica anular pretende incluir anillos anulares con perfiles aerodinámicos de sección transversal variada. Estas formas de sección transversal pueden estar comprendidas entre una... [Seguir leyendo]
Reivindicaciones:
1. Un dispositivo de control (1) para controlar la posición de un cable remolcado marino, comprendiendo el dispositivo de control:
una aleta aerodinámica anular (2)
una montura (3) dispuesta para montar la aleta aerodinámica anular sobre y alrededor del cable remolcado; y medios de control (4a, 4b) dispuestos para controlar la inclinación y/o rotación de la aleta aerodinámica para ajustar la posición lateral y/o profundidad del cable remolcado;
caracterizado porque los medios de control comprenden uno o más alerones (4a, 4b) montados de manera rotativa a lo largo de una cuerda o parte de una cuerda de la aleta aerodinámica anular que pasa a través del centro de la montura (3) , y que conecta la montura a la superficie interior de la aleta aerodinámica anular.
2. Un dispositivo de control según la reivindicación 1, en el que la montura (3) comprende un árbol hueco situado dentro de la aleta aerodinámica anular (2) y que se puede montar de manera rotativa alrededor de un eje longitudinal de un cable remolcado.
3. Un dispositivo de control según la reivindicación 1, en el que la montura (3) está dispuesta para ser permanentemente fijada al cable remolcado y tiene una superficie exterior montada rotativamente alrededor de una parte fija de la montura (3) .
4. Un dispositivo de control según cualquiera de las reivindicaciones precedentes, en el que la montura (3) no es concéntrica con la aleta aerodinámica anular.
5. Un dispositivo de control según cualquiera de las reivindicaciones precedentes, en el que los medios de control incorporan un motor electromecánico (301) dispuesto para ajustar la posición rotacional y/o lateral de la aleta aerodinámica anular.
6. Un dispositivo de control según cualquiera de las reivindicaciones precedentes, en el que la aleta aerodinámica anular está ponderada en una parte de su anillo de manera que haga que el dispositivo, cuando no se aplican otras cargas, se oriente con los alerones en una posición rotacional predetermina con respecto a la horizontal.
7. Un dispositivo según cualquiera de las reivindicaciones precedentes, en el que al menos un alerón (4b) está montado de manera rotativa alrededor de un par de puntos de pivotamiento, que se extienden radialmente hacia fuera desde la superficie exterior de la montura (3) y radialmente hacia dentro desde la superficie interior del alerón anular (2) .
8. Un dispositivo de control según las reivindicaciones 5 ó 7, en el que los medios de control incorporan uno o más pares de alerones (4a, 4b) que están montados de manera rotativa en posiciones diametralmente opuestas.
9. Un dispositivo de control según la reivindicación 8, en el que los medios de control comprenden un único par de alerones (4a, 4b) que están montados de manera rotativa en posiciones diametralmente opuestas, estando uno primero de dichos alerones (4a) conectado fijamente a la superficie interior de la aleta aerodinámica anular y montado rotativamente con respecto a la montura y estando el segundo de dichos alerones (4b) montado rotativamente con respecto tanto a la montura (3) como a la aleta aerodinámica anular (2) .
10. Un dispositivo de control según cualquiera de las reivindicaciones 7 a 9, en el que los medios de control incorporan uno o más motores electromecánicos (12) para controlar la posición rotacional de los alerones alrededor de su eje de rotación (5a, 5b) .
11. Un dispositivo de control según la reivindicación 10, en el que hay una pluralidad de alerones (4a, 4b) , y la posición rotacional de al menos uno de los alerones (4a) alrededor de su eje de rotación es controlable con independencia de la posición rotacional de uno o más de los otros alerones (4b) alrededor de sus respectivos ejes de rotación (5a, 5b) .
12. Un dispositivo de control según cualquiera de las reivindicaciones 7 a 11, en el que el alerón o alerones (4a, 4b) son hechos cambiar su posición de traslación cuando el alerón anular (2) es hecho girar alrededor de la montura (3) .
13. Un dispositivo de control según las reivindicaciones 5, 7 u 11, en el que los motores electromecánicos (301,
12) están dispuestos para ser alimentados por cables eléctricos que pasan a través del cable remolcado y conectados a una fuente de energía en un vehiculo marino que lleva los cables remolcados.
14. Un dispositivo de control según la reivindicación 5 o la 10, en el que los motores electromecánicos (301, 12) son alimentados por baterías.
15. Un dispositivo de control según cualquiera de las reivindicaciones 5 ó 10, en el que los motores electromecánicos (301, 12) son accionados manualmente.
16. Un dispositivo de control según cualquiera de las reivindicaciones 1 a 14, en el que los medios de control incorporan un sistema informático configurado para gestionar el posicionamiento de los cables remolcados dentro del agua.
17. Un dispositivo de control según la reivindicación 16, en el que los medios de control comprenden además un sistema de transductores para vigiar la posición real de los cables remolcados y/o los componentes del dispositivo de control.
18. Un dispositivo de control según cualquier reivindicación precedente, en el que los medios de control incorporan uno o más alerones (4a, 4b) montados alrededor de un diámetro o parte de un diámetro que pasa a través del centro de la montura (3) y que conecta la montura a la superficie interior de la aleta aerodinámica anular (2) y los bordes delanteros de los alerones están dirigidos esencialmente hacia delante de la cara delantera de la aleta aerodinámica anular.
19. Un cable remolcado marino que comprende:
un cable alargado flexible que lleva a lo largo de su longitud una pluralidad de hidrófonos y una pluralidad de dispositivos de control (1) según se reivindican en cualquiera de las reivindicaciones precedentes para controlar la posición del cable remolcado marino en el agua, estando los dispositivos de control separados a lo largo de la longitud del cable remolcado y montados permanentemente alrededor del mismo.
20. Un cable remolcado marino según la reivindicación 19, en el que la aleta aerodinámica anular esta montada alrededor del cable remolcado con puntos de unión tan cerca como es posible en el plano de su centro ascensional.
21. Un cable remolcado marino según las reivindicaciones 19 ó 20, en el que los dispositivos de control están situados a separaciones de entre unos 100 y unos 500 metros a lo largo de la longitud del cable remolcado.
22. Un cable remolcado marino según cualquiera de las reivindicaciones 19 a 21, en el que el cable remolcado es una formación militar remolcada.
23. Un cable remolcado marino según cualquiera de las reivindicaciones 19 a 22, en el que el cable remolcado es un cable remolcado sísmico.
24. Un cable remolcado marino según cualquiera de las reivindicaciones 19 a 23, que comprende una pluralidad de dispositivos de control ponderados en respectivas posiciones diferentes alrededor del anillo de la aleta aerodinámica anular y situados a separaciones similares a lo largo de la longitud del cable remolcado para ayudar a la separación del cable remolcado de cables remolcados similares debido a los respectivos efectos ascensionales de los alerones diferentemente posicionados rotacionalmente.
Patentes similares o relacionadas:
Método para instalar un cable submarino, del 17 de Junio de 2020, de FUNDACION TECNALIA RESEARCH & INNOVATION: Un método para instalar un cable submarino con un aparato sumergible , comprendiendo el método: suministrar alimentación eléctrica […]
Sistema de observación in situ multipunto a largo plazo con base en el fondo marino, del 4 de Marzo de 2020, de SHANDONG UNIVERSITY: Un sistema de observación in situ multipunto a largo plazo con base en el fondo marino caracterizado por comprender un marco de plataforma , un material flotante , […]
Dispositivo para controlar la posición de un cable de instrumentado remolcado en agua, del 24 de Julio de 2019, de KONGSBERG SEATEX AS: Un dispositivo de control para controlar la posición de un cable instrumentado remolcado en el agua, como un cable marino sísmico, y/o una batería de cables […]
 Método y aparato para sincronización de relojes subacuáticos usando luz y sonido, del 25 de Junio de 2019, de TrackServer, Inc: Un método para sincronizar dispositivos de reloj esclavos sumergidos a partir de un dispositivo de reloj maestro de modo inalámbrico, que comprende:
transmitir […]
Método y aparato para sincronización de relojes subacuáticos usando luz y sonido, del 25 de Junio de 2019, de TrackServer, Inc: Un método para sincronizar dispositivos de reloj esclavos sumergidos a partir de un dispositivo de reloj maestro de modo inalámbrico, que comprende:
transmitir […]
Bloque de amarres para un deflector, del 6 de Junio de 2019, de Mørenot Offshore AS: Un bloque de amarres para un deflector , incluyendo el bloque de amarres un vástago y un brazo basculante fijados de forma pivotante entre […]
Hidrófonos y sismómetros de fondo de mar, del 20 de Marzo de 2019, de INSTITUT FRANCAIS DE RECHERCHE POUR L'EXPLOITATION DE LA MER (IFREMER): Estación de fondo de mar destinada a efectuar unas mediciones in situ que comprende una estructura portadora de flotabilidad positiva a la […]
Búsqueda simultánea de fuentes durante la adquisición sísmica y la inversión sísmica, del 4 de Abril de 2018, de EXXONMOBIL UPSTREAM RESEARCH COMPANY: Un procedimiento para deducir un modelo de subsuperficie de velocidad u otra propiedad física, que comprende: obtener datos sísmicos adquiridos en una medición […]
 Método para la determinación de la distancia entre dispositivos acústicos bajo el agua, del 29 de Marzo de 2017, de Scantrawl a.s: Un método para la determinación de la distancia desde un punto de referencia al menos a dos módulos de sensor cuando estos están colocados aproximadamente […]
Método para la determinación de la distancia entre dispositivos acústicos bajo el agua, del 29 de Marzo de 2017, de Scantrawl a.s: Un método para la determinación de la distancia desde un punto de referencia al menos a dos módulos de sensor cuando estos están colocados aproximadamente […]