Receptor electrónico con correladores de bucle abierto para mitigar la interferencia de múltiples trayectorias, y método para estimar un error de alineación.
Receptor electrónico para un sistema global de navegación por satélite,
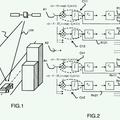
configurado para recibir, a lo largo de una trayectoria de línea de visión, una señal de navegación (si(t)) modulada con una secuencia de un tipo pseudoaleatorio, y para recibir, a lo largo de trayectorias reflejadas, varias réplicas de la señal de navegación, comprendiendo dicho receptor:
- una etapa de entrada (4) configurada para generar una señal de entrada (si(n)) de tipo numérico, como función de la señal de navegación y de las réplicas de la señal de navegación;
- un bucle de enganche de retardo (6) que incluye un generador de forma de onda local (34) configurado para generar una secuencia local (cr0(n)), estando dicho bucle de enganche de retardo configurado para recibir la señal de entrada y alinear en el tiempo la secuencia local con la secuencia recibida a lo largo de la trayectoria de línea de visión; y
- un primer correlador (51) y un segundo correlador (53), que están configurados para recibir la señal de entrada y para generar, respectivamente, una primera réplica de la secuencia local (A1(n)) y una segunda réplica de la secuencia local (A2(n)), estando dichos correladores primero y segundo configurados además para generar, respectivamente, una primera señal de correlación (y1(w), ym1(w)) y una segunda señal de correlación (y2(w), ym2(w)), indicando la primera señal de correlación la correlación entre la combinación de las secuencias recibidas y la primera réplica de la secuencia local, indicando la segunda señal de correlación la correlación entre la combinación de las secuencias recibidas y la segunda réplica de la secuencia local;
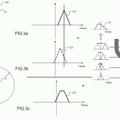
caracterizado porque, en un primer modo de funcionamiento, los correladores primero y segundo funcionan en modo de bucle abierto y dichas réplicas primera y segunda de la secuencia local están ambas adelantadas con respecto a la secuencia local, comprendiendo además dicho receptor una unidad de procesamiento (52) configurada para determinar una primera estimación de un error de alineación (τ ) entre la secuencia recibida a lo largo de la trayectoria de línea de visión y la secuencia local, como función de las señales de correlación primera y segunda y de los desplazamientos de fase entre la secuencia local y las réplicas primera y segunda de la secuencia local; y en el que, en dicho primer modo de funcionamiento, la primera réplica de la secuencia local (A1(n)) está adelantada con respecto a la secuencia local (cr0(n)) una primera cantidad (sA1), estando la segunda réplica de la secuencia local (A2(n)) adelantada con respecto a la secuencia local una segunda cantidad (sA2), estando dichas cantidades primera y segunda fijadas; y en el que la unidad de procesamiento (52) está configurada para determinar un tiempo que indica las posiciones de un primer punto ((x1 1(w), y1 1(w)) y un segundo punto ((x2 1(w), y2 1(w)) de una función de correlación de referencia, en el que dicha función de correlación de referencia adopta valores iguales a los valores de las señales de correlación primera y segunda (y1 1(w), y2 1(w); ym1(w), ym2(w)), respectivamente con respecto a un primer punto de referencia ((x1 0(w), y1 0(w)) y un segundo punto de referencia ((x2 0(w), y2 0(w))) de dicha función de correlación de referencia, estando dichos puntos de referencia primero y segundo separados del pico principal de dicha función de correlación de referencia distancias proporcionales, respectivamente, a las cantidades primera y segunda; y en el que dicha función de correlación de referencia indica la función de correlación en ausencia de múltiples trayectorias de la secuencia recibida a lo largo de la trayectoria de línea de visión.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2014/063523.
Solicitante: Leonardo S.p.A.
Nacionalidad solicitante: Italia.
Dirección: PIAZZA MONTE GRAPPA 4 00195 ROMA ITALIA.
Inventor/es: MARGARIA,DAVIDE, FALLETTI,EMANUELA, PARIZZI,FRANCESCO, BAGNASCO,ALBERTO, TORCHI,AUGUSTO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S19/22 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › Problemas relacionados con multitrayectos.
- G01S19/30 G01S 19/00 […] › relacionado con el código.
- H04B1/7075 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04B TRANSMISION. › H04B 1/00 Detalles de los sistemas de transmision, no cubiertos por uno de los grupos H04B 3/00 - H04B 13/00; Detalles de los sistemas de transmisión no caracterizados por el medio utilizado para la transmisión. › con código de adquisición de fase.
- H04B1/7085 H04B 1/00 […] › que usa un lazo de seguimiento de código, p. ej. un lazo de retraso bloqueado.
- H04B1/711 H04B 1/00 […] › siendo las interferencias interferencias multicamino.
PDF original: ES-2633013_T3.pdf
Patentes similares o relacionadas:
Procedimiento mejorado para determinar la posición y/o la velocidad de un vehículo guiado; sistema asociado, del 27 de Marzo de 2019, de ALSTOM Transport Technologies: Un procedimiento para seleccionar un conjunto de satélites visibles utilizables (LSVU) de un conjunto de satélites visibles (LSV) de una constelación de […]
Método y aparato para formar un haz, del 4 de Octubre de 2017, de LOCATA CORPORATION PTY LTD: Un dispositivo para formar un haz de un sistema de antenas , incluyendo el citado dispositivo: un sistema de antenas que […]
Método y aparato para conformar un haz remoto, del 4 de Octubre de 2017, de LOCATA CORPORATION PTY LTD: Un dispositivo para conformar un haz desde un sistema de antenas, en un receptor físicamente separado, incluyendo el dispositivo: un sistema […]
 Dispositivo espaciotemporal multi-antenas multi-correladores para el rechazo de los multi-trayecto de los sistemas de navegación, del 26 de Octubre de 2016, de THALES: Dispositivo de localización adecuado para discriminar una señal útil de señales multi-trayecto, incluyendo dicho dispositivo al menos dos […]
Dispositivo espaciotemporal multi-antenas multi-correladores para el rechazo de los multi-trayecto de los sistemas de navegación, del 26 de Octubre de 2016, de THALES: Dispositivo de localización adecuado para discriminar una señal útil de señales multi-trayecto, incluyendo dicho dispositivo al menos dos […]
 Procedimiento de estimación de la dirección de llegada de señales de navegación en un receptor después de la reflexión por unas paredes en un sistema de posicionamiento por satélite, del 16 de Febrero de 2016, de THALES: Procedimiento de estimación de la dirección de llegada de señales de navegación en un receptor tras la reflexión por unas paredes en un sistema de posicionamiento por […]
Procedimiento de estimación de la dirección de llegada de señales de navegación en un receptor después de la reflexión por unas paredes en un sistema de posicionamiento por satélite, del 16 de Febrero de 2016, de THALES: Procedimiento de estimación de la dirección de llegada de señales de navegación en un receptor tras la reflexión por unas paredes en un sistema de posicionamiento por […]
 Procedimiento de determinación de un indicador de confianza relativo a la trayectoria tomada por un móvil, del 12 de Febrero de 2016, de THALES: Procedimiento de determinación de un indicador de confianza relativo a la trayectoria de un móvil equipado con un receptor capaz de estimar la posición del móvil a partir […]
Procedimiento de determinación de un indicador de confianza relativo a la trayectoria tomada por un móvil, del 12 de Febrero de 2016, de THALES: Procedimiento de determinación de un indicador de confianza relativo a la trayectoria de un móvil equipado con un receptor capaz de estimar la posición del móvil a partir […]
Método de detección por trayectoria múltiple en receptores de espectro ensanchado, del 20 de Junio de 2013, de France Brevets: Un método para un análisis de detección por trayectoria múltiple de una señal deradiofrecuencia por medio de un receptor de espectro ensanchado , que consisteen: recibir […]
PROCEDIMIENTO Y APARATO PARA PROCESAMIENTO DE MEDICIÓN DE SEÑALES DE UN SISTEMA DE POSICIONAMIENTO POR SATÉLITE (SPS), del 13 de Julio de 2011, de SNAPTRACK INC.: Un procedimiento de procesado de las señales (SPS) de un sistema de posicionamiento por satélite, comprendiendo el mencionado procedimiento: determinar un primer posible pico […]