Procedimiento y dispositivo para la estimación de una postura.
Procedimiento para la estimación de la postura de un objeto que se mueve mediante cálculo por ordenador de desplazamientos de las coordenadas de posición 3D de los nodos de un modelo de esqueleto,
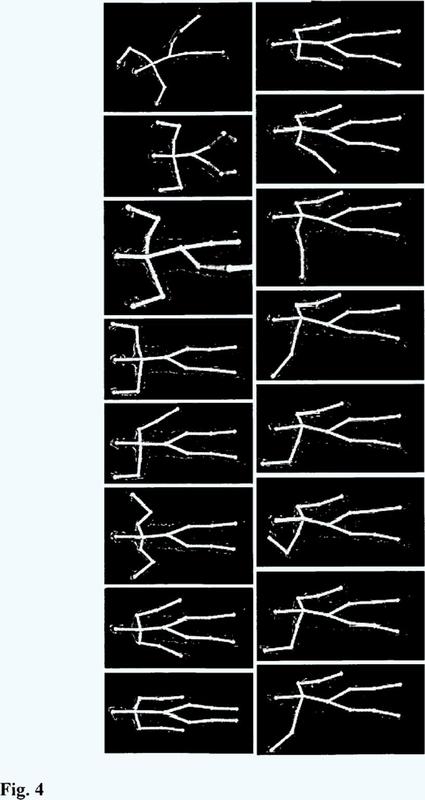
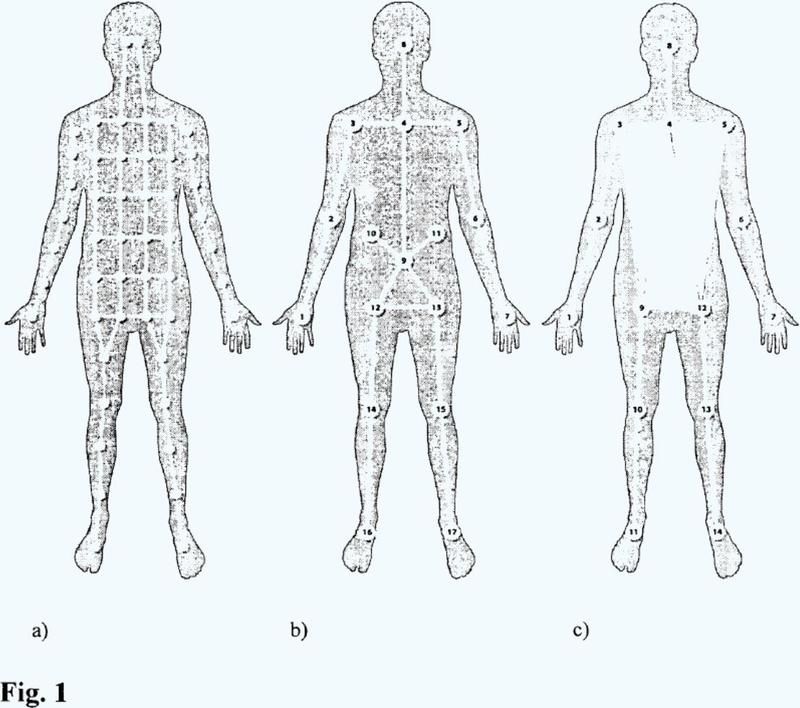
que se ajusta de manera continua en una secuencia de nubes de puntos 3D, en el que las coordenadas de nodos se encuentran tabuladas en una memoria de datos electrónicos y las nubes de puntos 3D se determinan a partir de imágenes electrónicamente registradas de una cámara de detector de profundidad, que representan el objeto que se mueve, en donde el modelo de esqueleto es una topología que presenta como elementos de topología N1 nodos, N2 aristas y N3 triángulos con N1, N2 > 0 y N3 ≥ 0, y cada elemento de topología se describe mediante nodos, pares de nodos o tripletes de nodos y se asigna de manera fija a una parte del objeto que se mueve y en donde una unidad de cálculo realiza las siguientes etapas:
a. seleccionar de manera aleatoria un punto de datos X de la nube de puntos 3D;
b. calcular el punto de base de altura P con respecto a X con referencia a cada elemento de topología y determinar si P se encuentra respectivamente dentro del elemento de topología;
c. calcular la distancia de X a cada elemento de topología como norma del vector diferencial X - P;
d. determinar aquel elemento de topología que presenta la distancia mínima a X de todos los elementos de topología, cuyo punto de base de altura P se encuentra dentro del elemento de topología;
e. desplazar el elemento de topología determinado en la etapa d mediante desplazamiento de todos los nodos que determinan el elemento de topología en dirección del vector X - P, en donde el vector de desplazamiento para un nodo se multiplica por una tasa de aprendizaje y, en caso de que el elemento de topología sea una arista o un triángulo, por un peso que resulta de la distancia del nodo al punto de base de altura P con respecto a X con referencia al elemento de topología determinado en la etapa d y
f. repetir las etapas a a e por un número predeterminado de etapas de aprendizaje con reducción gradual de la tasa de aprendizaje;
g. actualizar las coordenadas de nodos en la tabla de la memoria de datos electrónicos tras K pases del número predeterminado de etapas de aprendizaje con K ≥ 1;
h. proporcionar al menos las coordenadas de nodos actualizadas en la tabla para el procesamiento posterior.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2011/006388.
Solicitante: gestigon GmbH.
Nacionalidad solicitante: Alemania.
Dirección: Maria-Goeppert-Str. 9a 23562 Lübeck ALEMANIA.
Inventor/es: MARTINETZ,THOMAS, EHLERS,KRISTIAN, TIMM,FABIAN, BARTH,ERHARDT, KLEMENT,SASCHA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06T7/20 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › G06T 7/00 Análisis de imagen. › Análisis del movimiento (estimación del movimiento para codificación, decodificación, compresión o descompresión de señales de vídeo digitales H04N 19/43, H04N 19/51).
PDF original: ES-2558558_T3.pdf
Patentes similares o relacionadas:
Desplazamiento de inhibición de un dispositivo recargable inalámbricamente, del 26 de Febrero de 2020, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un método para inhibir el desplazamiento de un dispositivo recargable inalámbricamente posicionado en una superficie de carga subyacente […]
Sistemas y métodos de seguimiento de objetos asociativos, del 8 de Enero de 2020, de Isolynx, LLC: Un aparato de seguimiento asociativo para seguir un primer objeto (402 , 1206) usando información de seguimiento para el primer objeto (402 , 1206) e información […]
Procedimiento de estimación de flujo óptico a partir de un sensor de luz asíncrono, del 18 de Diciembre de 2019, de Sorbonne Université: Procedimiento de estimación de flujo óptico, que comprende: - recibir información asíncrona proveniente de un sensor de luz que tiene una matriz de píxeles dispuestos […]
Metrología en vivo de un objeto durante la fabricación u otras operaciones, del 21 de Agosto de 2019, de THE BOEING COMPANY: Un método para metrología en vivo de un objeto, que comprende: realizar una operación de escaneado mediante una pluralidad de sensores para […]
Procedimiento y dispositivo para la detección de objetos en movimiento en una secuencia de imágenes de vídeo, del 19 de Junio de 2019, de Airbus Defence and Space GmbH: Procedimiento para la detección de objetos en movimiento en una secuencia de imágenes de vídeo que comprende los pasos de: a) determinación de […]
Método y sistema para generar una representación 3D en una escena 3D dinámicamente cambiante, del 13 de Mayo de 2019, de VIZRT AG: Método para llenar los huecos que quedan en el fondo de una imagen después de recortar los objetos del fondo, que comprende las etapas […]
Sistema y método para medir el flujo del tráfico de un área, del 26 de Abril de 2019, de CUENDE INFOMETRICS, S.A.: Un sistema para estimar el flujo del tráfico real de un área, comprendiendo el sistema : • imágenes aéreas de un área tomadas a intervalos […]
Método implementado por ordenador y sistema para procesamiento de video con consistencia en el tiempo, del 15 de Abril de 2019, de RATIONAL PIXELS S.L: Un metodo implementado por ordenador para editar una secuencia de video con consistencia en el tiempo que comprende las etapas de: i) calcular un campo de movimiento […]