DISPOSITIVO DE IMPRESIÓN OMNIDIRECCIONAL POR CHORRO DE TINTA APTO PARA SU CONEXIÓN A UN BRAZO ROBÓTICO.
Dispositivo de impresión omnidireccional por chorro de tinta apto para su conexión a un brazo robótico.
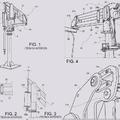
El objeto de la presente invención se refiere a un dispositivo de impresión omnidireccional por chorro de tinta que comprende, al menos, un cabezal (1) de impresión de nebulización de gas y tinta presurizados, donde dicho cabezal (1) está equipado con un canal (5) interior de suministro de tinta y un canal (6) exterior para el suministro de gas; y donde el cabezal (1) comprende, asimismo, una cámara (7) presurizada conectada con el canal (6) de gas, y que actúa como medio de impulsión del mismo. Ventajosamente, dicho dispositivo comprende, además, un módulo (2) de suministro conectado cabezal (1) de impresión, equipado con medios de alojamiento presurizado y distribución regulable de tinta y gas al cabezal (1) de impresión; un módulo (3) de electrónica conectado al módulo (2) de suministro y/o al cabezal (1) de impresión; y un módulo (4) de conexión electromecánica a un brazo robótico, equipado con medios para su fijación mecánica solidaria a dicho brazo.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201631197.
Solicitante: INGENIATRICS TECNOLOGIAS, S.L.
Nacionalidad solicitante: España.
Provincia: SEVILLA.
Inventor/es: GAÑÁN RIESCO,Braulio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J18/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Brazos.
- B41J2/015 B […] › B41 IMPRENTA; MAQUINAS COMPONEDORAS DE LINEAS; MAQUINAS DE ESCRIBIR; SELLOS. › B41J MAQUINAS DE ESCRIBIR; MECANISMOS DE IMPRESION SELECTIVA, es decir, MECANISMOS QUE IMPRIMEN DE OTRA MANERA QUE NO SEA POR UTILIZACION DE FORMAS DE IMPRESION; CORRECCION DE ERRORES TIPOGRAFICOS (composición B41B; impresión sobre superficies especiales B41F; marcado para el lavado B41K; raspadores, gomas o dispositivos para borrar B43L 19/00; productos fluidos para corregir errores tipográficos por recubrimiento C09D 10/00; registro en materia de medidas G01; reconocimiento o presentación de datos, marcado de soportes de registro en forma numérica, p. ej. por punzonado, G06K; aparatos de franqueo o aparatos de impresión y entrega de tiquets G07B; conmutadores eléctricos para teclados, en general H01H 13/70, H03K 17/94; codificación en relación con teclados o dispositivos similares, en general H03M 11/00; emisores o receptores para transmisión de información numérica H04L; transmisión o reproducción de imágenes o de dibujos invariables en el tiempo, p. ej. transmisiones en facsímil, H04N 1/00; mecanismos de impresión especialmente adaptados para aparatos, p. ej. para cajas-registradoras, máquinas de pesar, produciendo un registro de su propio funcionamiento, ver las clases apropiadas). › B41J 2/00 Máquinas de escribir o mecanismos de impresión selectiva caracterizados por el procedimiento de impresión o de marcado para el cual son concebidas (montaje, arreglo o disposición de los tipos o de las matrices B41J 1/00; procedimientos de marcado B41M 5/00; estructura o fabricación de las cabezas, p. ej. cabezas de variación de inducción, para el registro por magnetización o desmagnetización de un soporte de registro G11B 5/127; cabezas para la reproducción de información capacitiva G11B 9/07). › caracterizados por el procedimiento de formación del chorro (B41J 2/215 tiene prioridad).
- B41J2/11 B41J 2/00 […] › para obtener una vaporización de tinta.
- B41J2/14 B41J 2/00 […] › Su estructura.
PDF original: ES-2594891_A1.pdf
Patentes similares o relacionadas:
BANCO DE ENSAYOS PARA LA MEDICIÓN DE IMPACTOS, del 3 de Junio de 2020, de ASENSIO CAÑO, Miguel Ángel: 1. Un banco de ensayos para la medición de impactos que comprende un primer soporte y un segundo soporte que se caracteriza porque el primer […]
EQUIPO DE IMPRESIÓN Y ETIQUETADO AUTOMÁTICO DE PALÉS, del 14 de Abril de 2020, de LABELFACTORY, S.L: Equipo de impresión y etiquetado automático de palés. Equipo que comprende una zona segura protegida con un vallado perimetral y puertas de acceso aperturables […]
Disposición articulada con al menos un eje accionado, del 26 de Abril de 2019, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Disposición articulada con al menos un eje accionado, en particular para activar un movimiento de un componente de un robot, - en donde al menos […]
 Un manipulador neumático equilibrado, del 4 de Enero de 2016, de DALMEC S.P.A.: Un manipulador neumático equilibrado, que incluye:
- un dispositivo de soporte que incluye un grupo giratorio alrededor de un eje vertical (z);
[…]
Un manipulador neumático equilibrado, del 4 de Enero de 2016, de DALMEC S.P.A.: Un manipulador neumático equilibrado, que incluye:
- un dispositivo de soporte que incluye un grupo giratorio alrededor de un eje vertical (z);
[…]
Robot delta para aumetnar los requisitos en cuanto a dinámica, higiene y protección frente a las consecuencias de una colisión, del 2 de Enero de 2013, de ELAU GMBH: Robot delta destinado al aumento de los requisitos en cuanto a dinámica, higiene y protección frente a las consecuencias de una colisión, que comprende -un alojamiento […]
NUEVOS DERIVADOS DE PIPERIDINA COMO MODULADORES DEL RECEPTOR CCR5 DE LA QUIMIOQUINA., del 16 de Mayo de 2007, de BIOTAGE AB: Un compuesto de fórmula (I): (Ver fórmula) en la que A está ausente o es (CH2)2; R1 es heterociclilo, en el que el grupo heterociclilo se selecciona de pirano, piperidina, piperazina, […]
DISPOSICION ROBOTICA GONIOMETRICA., del 16 de Noviembre de 2002, de ARMSTRONG HEALTHCARE LIMITED: EN UNA DISPOSICION ROBOTICA UN TELESCOPIO ALARGADO SE HALLA ADAPTADO PARA SER INSERTADO DENTRO DE UN PACIENTE . UN BRAZO CONDUCTOR ESTA […]
ROBOT MANIPULADOR PARA PALETIZADOR, del 14 de Octubre de 2011, de SIDEL PARTICIPATIONS: Robot manipulador del tipo de tres o cuatro ejes para paletizador, que comprende: - un puente guiado sobre vigas situadas en la parte superior del armazón […]