Vehículo submarino autónomo para la adquisición de datos geofísicos.
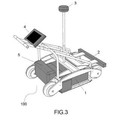
Un vehículo submarino autónomo equipado (100) para la adquisición del gradiente gravimétrico y magnético cerca del lecho marino,
caracterizado porque comprende:
- al menos un gradiómetro gravimétrico (5);
- al menos un gradiómetro magnético (4).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2011/068539.
Solicitante: ENI S.P.A..
Nacionalidad solicitante: Italia.
Dirección: PIAZZALE E. MATTEI 1 00144 ROME ITALIA.
Inventor/es: GIORI,ITALIANO, ANTONELLI,MASSIMO, FINOTELLO,ROBERTO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01V11/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01V GEOFISICA; MEDIDA DE LA GRAVITACION; DETECCION DE MASAS U OBJETOS; MARCAS O ETIQUETAS DE IDENTIFICACION (medios para indicar dónde se encuentran personas sepultadas accidentalmente, p. ej. por la nieve A63B 29/02). › Prospección o detección por métodos que combinan técnicas cubiertas por dos o más de los grupos principales especificadas en los grupos G01V 1/00 - G01V 9/00.
PDF original: ES-2537449_T3.pdf
Fragmento de la descripción:
Vehículo submarino autónomo para la adquisición de datos geofísicos La presente invención está relacionada con un vehículo submarino autónomo para la adquisición de datos geofísicos, equipado con instrumentos para la recogida de dichos datos en el lecho marino.
El análisis del lecho marino permite obtener información útil sobre la composición y estructura del propio subsuelo.
En particular, una correcta evaluación de ciertas zonas del subsuelo permite la identificación de posibles depósitos de hidrocarburos.
Uno de los sistemas de análisis utilizado es una prospección magnetométrica que aprovecha el magnetismo de la Tierra y se lleva a cabo normalmente en regiones relativamente grandes del territorio.
Todas las variaciones del campo magnético, que no pueden ser atribuidas a causas naturales o artificiales, son debidas a los contrastes de susceptibilidad magnética en las rocas del subsuelo. Las rocas que proporcionan estos contrastes son principalmente rocas magnéticas que forman normalmente el substrato sobre el cual descansan las rocas sedimentarias.
Las prospecciones magnetométricas y las del gradiente magnético permiten estimar el grosor de las rocas sedimentarias, detectando posibles intrusiones/efusiones volcánicas presentes en el subsuelo.
Un sistema adicional de análisis del subsuelo está representado por la medición gravimétrica, la cual permite el seguimiento de variaciones de la aceleración de la gravedad.
El gravímetro permite la medición de la aceleración de la gravedad, y por tanto de las diferencias de masa de las rocas del subsuelo, revelando las variaciones de la densidad de las litologías situadas por debajo del gravímetro, por ejemplo una capa de basalto tiene un efecto gravimétrico mayor que una capa de sal, ya que su densidad específica es mucho más alta que la de la sal.
Esta medición requiere normalmente numerosas correcciones, ya que la medición de la gravedad está influenciada por muchos factores, tales como la topografía de la zona, por ejemplo la latitud, las mareas y el nivel en el cual se efectúa la medición.
Con el fin de obtener resultados significativos y para una correcta interpretación de los datos, los instrumentos deben alcanzar un nivel muy alto de sensibilidad y precisión, del orden de micro-Gales (1 µGal = 10-8 m/seg2) , es decir, 10-9 g (aceleración de la gravedad g = 9, 80665 m/s2) . Con este nivel de sensibilidad, los efectos espurios no relacionados con la distribución de masa en el subsuelo, ya sean debidos a irregularidades topográficas o a artefactos antrópicos sobre la superficie, o a fluctuaciones temporales de la gravedad de origen astronómico (mareas) , pueden solaparse con la señal útil, haciendo que la detección sea compleja.
Además de este fenómeno, existen derivas instrumentales, cuyos efectos se hacen más significativos con una recogida de datos prolongada.
Con el fin de superar estas dificultades, se ha desarrollado el método gradiométrico, donde los datos a procesar son un componente del tensor gradiente de g, determinado como la diferencia entre los valores de g medidos con respecto a una distancia base fija.
Existen diversos métodos y sistemas en el estado de la técnica que usan análisis gravimétricos y/o magnetométricos para adquirir información sobre el subsuelo.
La patente WO 2006/020662, por ejemplo, describe un método de análisis de una zona geográfica, que utiliza un aeroplano adecuadamente equipado con instrumentos gravimétricos.
En particular, de acuerdo con este método, se recogen datos geofísicos relativos a la zona que se examina, se calculan parámetros geofísicos relativos a la zona bajo examen y se define entonces una relación entre los datos recogidos y los previstos.
Estos datos geofísicos pueden ser revelados con un gravímetro o con un gradiómetro gravimétrico, con el fin de analizar la densidad superficial de la zona examinada.
Particularmente en la industria de los hidrocarburos, se conoce también el sistema de Gradiómetro de Gravedad del Tensor Total (FTG) para exploraciones de ultramar, desarrollado por Bell Aerospace (actualmente Lockheed Martin) .
Dos ejemplos de la aplicación industrial de la tecnología FTG son la Air-FTG® (FTG-aérea) y la Marine-FTG® (FTGmarina) .
El primero es un sistema de prospección gravimétrico/gradiométrico aerotransportado, mientras que el segundo es un sistema marino.
Ambos sistemas proporcionan información sobre el gradiente gravimétrico por medio de un análisis tensorial y un proceso de reducción de las perturbaciones generadas por los medios de transporte y otros factores externos.
Un ejemplo adicional de un sistema aerotransportado de análisis gradiométrico es el gradiómetro Falcon® de gravedad aerotransportado (AGG) de la compañía BHP-Billiton, que al volar sobre zonas geográficas puede medir los cambios en la gravedad de la Tierra.
En particular, la medición del gradiente se obtiene como diferencia entre las respuestas medidas por dos gradiómetros. Los datos revelados con este sistema deben ser purificados respecto a las interferencias relativas a los medios de transporte aéreo.
Sin embargo, la técnica conocida tiene diversos límites asociados con la calidad de los datos gravimétricos medidos, los datos, en realidad, son adquiridos normalmente por instrumentos posicionados en la proximidad del nivel del mar o incluso por encima del propio nivel, de esta manera, el instrumento de medición está a menudo alejado del objeto medido. La intensidad de la señal gradiométrica generada por una estructura de masas disminuye con la distancia al cubo, consecuentemente, las detecciones del gradiente de gravedad relativo al lecho marino efectuadas por los gradiómetros gravimétricos posicionados cerca o por encima de la superficie del mar, acusan la distancia en términos de precisión de la señal.
Hay por tanto un amplio margen de mejora de la calidad y fiabilidad de las detecciones geofísicas, particularmente si se dirigen a la búsqueda de nuevas formaciones potencialmente adecuadas para la producción de hidrocarburos.
En la solicitud de patente US 2010/0153050, se describe una técnica adicional conocida del estado de la técnica, en la cual se usa un AUV que comprende un sensor gradiométrico para la prospección del campo de gravead cerca del lecho marino.
En particular, este documento describe un sistema provisto de un sensor de gravedad que comprende una junta cardan motorizada, un sensor de movimiento montado sobre la junta, un sensor gravimétrico montado sobre la junta y un recipiente capaz de contener los componentes citados, instalable dentro de un AUV.
Sin embargo, el uso de un gravímetro a bordo de un AUV para la prospección del campo gravitatorio tiene varias limitaciones.
En realidad, el gravímetro no es capaz de separar los efectos debidos a la aceleración de la gravedad con respecto a los efectos debidos a las aceleraciones inerciales del vehículo submarino a lo largo del componente vertical.
El gradiómetro gravimétrico, por el contrario, al medir el gradiente de gravedad con dos acelerómetros, permite anular los efectos inerciales, comunes a los dos instrumentos.
El Solicitante ha averiguado ahora un sistema y la instalación de un aparato adecuado para medir los datos gravimétricos y magnetométricos en la proximidad del lecho marino, para obtener resultados que son cualitativamente más altos que los obtenidos en el nivel del mar o por encima de él. La resolución que se puede obtener, en realidad, desde las prospecciones efectuadas con sensores situados a una distancia limitada desde el objeto potencial de la prospección, es mayor tanto en amplitud como en la frecuencia de las anomalías, para el campo gravitatorio y magnético.
Además, en el estado de la técnica, no hay métodos de medición combinados del gradiente gravimétrico y magnético.
Un objetivo adicional de la presente invención es combinar la medición del gradiente de gravedad con la medición del gradiente magnético para obtener información cualitativamente mejorada sobre el subsuelo marino.
La técnica conocida, además, no describe métodos de prospección y detección de los datos gradiométricos magnéticos y de la gravedad efectuados con medios de transporte submarinos capaces de alcanzar grandes profundidades.
Un primer objeto de la presente invención está relacionado por tanto con un vehículo submarino autónomo equipado para la adquisición del gradiente gravimétrico y magnético cerca del lecho marino, caracterizado porque comprende:
- al menos un gradiómetro gravimétrico;
- al menos un... [Seguir leyendo]
Reivindicaciones:
1. Un vehículo submarino autónomo equipado (100) para la adquisición del gradiente gravimétrico y magnético cerca del lecho marino, caracterizado porque comprende:
- al menos un gradiómetro gravimétrico (5) ; -al menos un gradiómetro magnético (4) .
2. El vehículo submarino autónomo equipado (100) según la reivindicación 1, en el que dicho gradiómetro gravimétrico (5) mide la componente vertical Tzz del gradiente gravimétrico.
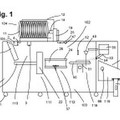
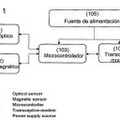
** (Ver fórmula) ** que dicho gradiómetro gravimétrico (5) comprende dos acelerómetros que tienen una sensibilidad de 1 dentro de una gama de frecuencias inferior a 10-1 Hz. 4. El vehículo submarino autónomo equipado (100) según la reivindicación 3, en el que dicha gama de frecuencias oscila entre 10-4 Hz y 10-2 Hz. 5. El vehículo submarino autónomo equipado (100) según cualquiera de las reivindicaciones precedentes, en el que dicho gradiómetro gravimétrico (5) está posicionado en el baricentro de dicho vehículo submarino autónomo equipado (100) . 6. El vehículo submarino autónomo equipado (100) según la reivindicación 1, en el que dicho gradiómetro magnético (4) consiste en al menos dos magnetómetros escalares (12) integrados con dicho vehículo (100) y situados dentro y/o fuera del casco (1) del vehículo (100) . 7. El vehículo submarino autónomo equipado (100) según la reivindicación 6, en el que dichos magnetómetros escalares (12) que forman dicho gradiómetro magnético (4) son 3. 8. El vehículo submarino autónomo equipado (100) según la reivindicación 6, en el que dichos magnetómetros escalares (12) están posicionados a una distancia de 20 cm a 10 m uno del otro. 9. El vehículo submarino autónomo equipado (100) según la reivindicación 8, en el que dichos magnetómetros escalares (12) están posicionados a una distancia de 40 cm a 1, 5 m uno del otro. 10. El vehículo submarino autónomo equipado (100) según la reivindicación 6, en el que dichos magnetómetros escalares (12) que forman dicho gradiómetro magnético (4) efectúan mediciones del campo magnético con una precisión de hasta 0, 01 nT. 11. El vehículo submarino autónomo equipado (100) según la reivindicación 10, en el que dichos magnetómetros escalares (12) que forman dicho gradiómetro magnético (4) efectúan mediciones del campo magnético con una precisión de hasta 0, 1 nT. 12. El vehículo submarino autónomo equipado (100) según cualquiera de las reivindicaciones 6 a 11, en el que dichos magnetómetros escalares (12) miden el campo magnético con tecnologías de Resonancia Magnética Nuclear. 13. El vehículo submarino autónomo equipado (100) según cualquiera de las reivindicaciones precedentes, que comprende: -un casco (1) ; -al menos un sistema (3) de propulsión; -al menos un sistema (2) de accionamiento; - al menos un sistema (7) de alimentación; -al menos un sistema (8) de control. 14. Uso del vehículo submarino autónomo equipado (100) según cualquiera de las reivindicaciones precedentes, para identificar zonas potenciales útiles para la explotación de crudo. 15. Un método de análisis de las características geofísicas del subsuelo, que comprende la adquisición del gradiente gravimétrico y magnético en un entorno submarino, caracterizado por las fases siguientes: - uso de un vehículo submarino autónomo equipado (100) según cualquiera de las reivindicaciones 1 -13; - inmersión de dicho vehículo (100) en la proximidad del lecho marino; -navegación a lo largo de una ruta programada; -adquisición y almacenamiento de los datos recogidos por dichos gradiómetros y dichos instrumentos en correlación con el punto geográfico de la medición. 5. recuperación de los datos recogidos y uso de los mismos para el análisis geofísico del subsuelo. 16. El vehículo submarino autónomo equipado (100) según la reivindicación 1, en el que el gradiómetro gravimétrico (5) comprende: - una primera carcasa esférica (13) conectada al vehículo submarino autónomo equipado (100) y capaz de resistir altas presiones; -una segunda carcasa (14) con dimensiones menores que las de la primera carcasa (13) y conectada a ella por medio de un sistema (17) de junta cardan; - una tercera carcasa (15) con dimensiones menores que la de la segunda carcasa (14) y conectada a ella por medio de una junta cardan (18) que permite su oscilación dentro de la segunda carcasa (14) , donde dicha tercera carcasa está provista de un sistema de pesas (19) instalado en la parte inferior; -dos acelerómetros (16) alineados a lo largo de la vertical, situados a una distancia mutua de menos de 60 cm, y confinados dentro de la estructura de la tercera carcasa (15) . 17. El vehículo submarino autónomo equipado (100) según la reivindicación 16, en el que dichos acelerómetros (16) del gradiómetro gravimétrico (5) están situados a una distancia que oscila entre 10 y 40 cm uno del otro. 3. El vehículo submarino autónomo equipado (100) según cualquiera de las reivindicaciones precedentes, en el
Patentes similares o relacionadas:
DISPOSITIVO Y PROCEDIMIENTO PARA MEDIR LA ALTURA DE CÚMULOS DE UNA SUSTANCIA EN ENTORNOS FERROVIARIOS, del 16 de Marzo de 2017, de ADMINISTRADOR DE INFRAESTRUCTURAS FERROVIARIAS (ADIF): Se divulga un dispositivo para medir la altura de cúmulos de una sustancia en entornos ferroviarios y su procedimiento de medida asociado. El dispositivo comprende: una […]
DISPOSITIVO Y PROCEDIMIENTO PARA MEDIR LA ALTURA DE CÚMULOS DE UNA SUSTANCIA EN ENTORNOS FERROVIARIOS, del 13 de Marzo de 2017, de ADMINISTRADOR DE INFRAESTRUCTURAS FERROVIARIAS (ADIF): Dispositivo y procedimiento para medir la altura de cúmulos de una sustancia en entornos ferroviarios. Se divulga un dispositivo para medir la altura de cúmulos […]
 Sistema y método de localización y cartografía de activos enterrados, del 23 de Octubre de 2014, de XPRESA GEOPHYSICS S.L: Sistema y método de localización y cartografía de servicios enterrados que combina la adquisición simultánea de una matriz de antenas de georradar (GPR, Ground Penetrating […]
Sistema y método de localización y cartografía de activos enterrados, del 23 de Octubre de 2014, de XPRESA GEOPHYSICS S.L: Sistema y método de localización y cartografía de servicios enterrados que combina la adquisición simultánea de una matriz de antenas de georradar (GPR, Ground Penetrating […]
 MAQUINA DE INSPECCIÓN AUTOMÁTICA Y CONTINUA, del 30 de Mayo de 2014, de ARPO-ROBOTIC SECURITY EQUIPMENT, S.L: Máquina de inspección automática y continua, para la detección de contenidos peligrosos en paquetes y otros envíos postales, y método correspondiente Comprende un […]
MAQUINA DE INSPECCIÓN AUTOMÁTICA Y CONTINUA, del 30 de Mayo de 2014, de ARPO-ROBOTIC SECURITY EQUIPMENT, S.L: Máquina de inspección automática y continua, para la detección de contenidos peligrosos en paquetes y otros envíos postales, y método correspondiente Comprende un […]
Sistema de detección de múltiples peligros, del 25 de Diciembre de 2013, de QYLUR SECURITY SYSTEMS: Aparato para la inspección de un objeto en búsqueda de un artículo peligroso, que comprende: una unidad de pruebas que incluye unas fuentes y/o un equipo […]
Sistema de detección de múltiples peligros, del 21 de Noviembre de 2013, de QYLUR SECURITY SYSTEMS: Sistema para la inspección de un ser humano o un animal con respecto a un artículo peligroso, comprendiendo el sistema: un portal para […]
 Método y aparato para detectar continuamente la presencia de vehículos con un sensor óptico y un sensor magnético, del 8 de Noviembre de 2013, de UNIVERSITAT POLITECNICA DE CATALUNYA: En la presente invención se describe un método y un aparato de detección continua, no intermitente, de vehículos basado en la detección del cambio brusco […]
Método y aparato para detectar continuamente la presencia de vehículos con un sensor óptico y un sensor magnético, del 8 de Noviembre de 2013, de UNIVERSITAT POLITECNICA DE CATALUNYA: En la presente invención se describe un método y un aparato de detección continua, no intermitente, de vehículos basado en la detección del cambio brusco […]
MÉTODO Y APARATO PARA DETECTAR CONTINUAMENTE LA PRESENCIA DE VEHÍCULOS CON UN SENSOR ÓPTICO Y UN SENSOR MAGNÉTICO, del 29 de Febrero de 2012, de UNIVERSITAT POLITECNICA DE CATALUNYA: Método y aparato para detectar continuamente la presencia de vehículos con un sensor óptico y un sensor magnético.En la presente invención se describe un método y un aparato […]