Sistema de detección de múltiples peligros.
Aparato (10) para la inspección de un objeto en búsqueda de un artículo peligroso,
que comprende:
una unidad de pruebas (20) que incluye unas fuentes y/o un equipo de prueba; un compartimento; un sensor adaptado para generar una señal de salida; y una unidad de computación (40) para recibir y procesar la salida,
caracterizado porque:
la unidad de pruebas (20) presenta una pluralidad de superficies externas; el compartimento comprende una pluralidad de compartimentos (60a-60e) acoplados con la unidad de pruebas (20), estando cada uno de los compartimentos colocado de manera adyacente a una de las superficies externas de la unidad de pruebas y estando configurado para contener el objeto que está siendo inspeccionado;
el sensor (66) está adaptado para generar una señal de salida que indica que el objeto en el respectivo compartimento ha accedido a las fuentes y/o al equipo de prueba en la unidad de pruebas; y
la unidad de computación (40) está destinada a recibir y procesar la señal de salida de cada uno de los compartimentos.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11177304.
Solicitante: QYLUR SECURITY SYSTEMS.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 202 RINCONADA AVENUE PALO ALTO, CA 94301 ESTADOS UNIDOS DE AMERICA.
Inventor/es: SAGI-DOLEV,ALYSIA M.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01M99/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › Ensayo de estructuras o aparatos, no previstos en los otros grupos de esta subclase.
- G01V11/00 G01 […] › G01V GEOFISICA; MEDIDA DE LA GRAVITACION; DETECCION DE MASAS U OBJETOS; MARCAS O ETIQUETAS DE IDENTIFICACION (medios para indicar dónde se encuentran personas sepultadas accidentalmente, p. ej. por la nieve A63B 29/02). › Prospección o detección por métodos que combinan técnicas cubiertas por dos o más de los grupos principales especificadas en los grupos G01V 1/00 - G01V 9/00.
- G08B19/00 G […] › G08 SEÑALIZACION. › G08B SISTEMAS DE SEÑALIZACION O DE LLAMADA; TRANSMISORES TELEGRAFICOS DE ORDENES; SISTEMAS DE ALARMA. › Alarmas que reaccionan a dos o más condiciones diferentes, indeseables o anormales, p. ej. atraco e incendio, temperatura anormal y caudal de derrame anormal.
PDF original: ES-2453980_T3.pdf
Fragmento de la descripción:
Sistema de detección de múltiples peligros.
Campo de la invención La presente invención se refiere en general a un sistema para detectar la presencia de un artículo peligroso, y más en particular a un sistema para detectar la presencia de un artículo peligroso mediante el uso de una pluralidad de pruebas en paralelo.
Antecedentes En la actualidad, los sistemas de seguridad de puntos de control en lugares públicos como aeropuertos o edificios gubernamentales normalmente incluyen algún tipo de combinación de una prueba de imagen, un detector de metales y una prueba química. La prueba química habitualmente se sirve de una máquina de mesa para la detección de rastros de explosivos (ETD, por sus siglas en inglés, explosive trace detection) , en la que se toma un hisopo o una muestra de aire de un objeto (por ejemplo, una bolsa) y se somete a una prueba para detectar rastros de materiales explosivos.
Desgraciadamente, los sistemas de control de seguridad que se utilizan actualmente no son tan fiables como deberían. Por ejemplo, las pruebas de rayos X identifican artículos peligrosos basándose en la densidad de los objetos, y un gran número de objetos inofensivos posee densidades similares a las de algunos objetos peligrosos. Como es natural, el índice de falsos negativos es elevado. Puesto que la prueba de imagen implica rayos X o tomografías computerizadas, la exactitud de las pruebas depende en gran medida del estado de concentración y del juicio de un operador humano que revisa las imágenes a medida que se van escaneando las bolsas. Aunque varios sistemas incluyen la clasificación visual automática de artículos sospechosos, la dependencia de la concentración y el juicio humanos todavía desempeña un papel importante en estos sistemas. Debido a las distracciones, la fatiga y las limitaciones naturales de la capacidad para concentrarse de los seres humanos, un sistema de control que se base en gran medida en el juicio humano no puede alcanzar un nivel óptimo de precisión. Asimismo, debido a que la prueba de imagen se basa en gran medida en la visualización de los objetos que se están sometiendo a pruebas, un pasajero puede disfrazar u ocultar un artículo nocivo peligroso para evitar la detección por la prueba de imagen.
Se ha intentado aumentar la precisión de un sistema de seguridad de punto de control mediante el uso de una combinación de pruebas, como por ejemplo una prueba de imagen, una prueba de detección de metales y una prueba química. Normalmente, las pruebas se llevan a cabo mediante la utilización de tres equipos independientes que se colocan uno al lado del otro. Los equipos independientes someten a prueba los objetos por separado y de forma secuencial, una prueba tras otra. Por ejemplo, un sistema de seguridad en aeropuertos puede emplear una prueba de imagen de rayos X y someter posteriormente a una prueba química únicamente las bolsas que han sido indicadas como sospechosas por la prueba de imagen de rayos X. De manera similar, por lo que respecta a los pasajeros, en primer lugar se les puede pedir que pasen a través de un portal de detección de metales preliminar, y después se les puede someter a una prueba de detección de metales más rigurosa llevada a cabo por un operador humano solo cuando la prueba preliminar del portal tiene como consecuencia que se dispare una alarma.
Un problema con este tipo de combinación en serie/secuencial de pruebas es que la precisión general depende en gran medida de la exactitud de cada prueba individual, y en algunos casos de la exactitud de la primera prueba. Por ejemplo, si no se utiliza la prueba química a menos que una bolsa no pase la prueba de imagen por rayos X, el uso de la prueba química resulta útil únicamente si la prueba de imagen de rayos X identifica con precisión las bolsas sospechosas. Si el operador que está revisando las imágenes de rayos X no detecta un posible artículo peligroso, el hecho de que se pueda realizar fácilmente una prueba química no altera la circunstancia de que el posible artículo peligroso haya pasado a través del sistema de seguridad.
Aunque el uso de múltiples pruebas en todos los pasajeros y sus equipajes constituiría una manera obvia de mejorar la precisión de los controles de seguridad, tal solución no resulta práctica, ya que tendría como consecuencia que los pasajeros pasarían un periodo excesivo de tiempo atravesando los controles de seguridad. Además, el coste de este sistema sería prohibitivo. En una implementación práctica, la precisión de las pruebas de control de seguridad está equilibrada con –y se ve comprometida por– la necesidad de que los pasajeros pasen a través del sistema a una velocidad razonable. Además, si se utiliza en primer lugar una prueba que produce un índice elevado de falsos positivos, como la prueba de rayos X, el flujo de pasajeros se reduce innecesariamente debido a que muchas bolsas que no contienen un artículo peligroso tendrían que ser sometidas a la segunda prueba.
Es deseable un sistema y un método que permita que los pasajeros atraviesen un punto de control de seguridad a una velocidad razonable sin comprometer la precisión de las pruebas de control de seguridad.
El documento WO2004023413 divulga: una red de sensores que proporciona la capacidad de detectar, clasificar e identificar una diversidad de agentes en una zona amplia, tal como una zona geográfica o edificio. El procesamiento
de información obtenido a partir de múltiples sensores proporciona una elevada probabilidad de detección de con una baja probabilidad de falsa alarma.
El documento WO9921148 divulga un sistema de recorrido integrado para detectar objetos escondidos o sospechosos mediante uno o más de un dispositivo de escáner dieléctrico, un dispositivo de escáner de rayos X, un dispositivo de detección de metales, un dispositivo de cámara de ondas milimétricas y un dispositivo de análisis y recogida de vapor.
Sumario De acuerdo con un aspecto de la invención, está previsto un aparato según la reivindicación 1.
El aparato puede incluir una unidad de pruebas que incluye un equipo para someter el objeto a una combinación de dos o más pruebas y unas unidades de objeto modulares pueden acoplarse a la unidad de prueba. Cada una de las unidades de objeto puede estar diseñada para contener un objeto, comprobando la unidad de prueba los objetos en las diferentes unidades de objeto. Una unidad de computación puede recibir señales de salida de una o más de las unidades de objeto y de la unidad de prueba y puede determinar un factor de riesgo para cada objeto en las diferentes unidades de objeto.
La invención posibilita el hecho de identificar un objeto en una unidad de objeto que tiene múltiples sensores situados dentro de la misma, y de someter el objeto a una combinación de pruebas para identificar las propiedades del objeto. Las señales de salida de los múltiples sensores dispuestos en la unidad de objeto pueden ser leídas, y las señales de salida pueden ser procesadas individualmente para generar valores de parámetro. Los valores de parámetro pueden combinarse para determinar un factor de riesgo que indique la probabilidad de que el artículo peligroso esté presente en el objeto.
Breve descripción de los dibujos La Figura 1 es un diagrama de bloques en el que se ilustran los componentes principales de un sistema de detección de múltiples peligros de conformidad con la invención.
La Figura 2 es un diagrama de bloques de un ejemplo de forma de realización del sistema de detección de múltiples peligros.
La Figura 3 es un diagrama de bloques en el que se ilustran los módulos de la unidad de computación para ejecutar un método de identificación de artículos peligrosos.
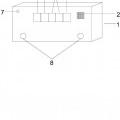
La Figura 4 es un ejemplo de forma de realización del sistema de detección de múltiples peligros que incluye una sola unidad de pruebas y múltiples unidades de objeto.
La Figura 5 es un diagrama de bloques en el que se muestra la unidad de pruebas y las unidades de objeto.
La Figura 6 es otro ejemplo de forma de realización del sistema de detección de múltiples peligros en el que el objeto es un ser humano (o cualquier otro animal) .
La Figura 7 es otro ejemplo adicional de realización del sistema de detección de múltiples peligros para someter a prueba objetos inanimados y seres humanos.
Descripción detallada de las formas de realización En la presente memoria, se describen las formas de realización de la invención en el contexto de un sistema de seguridad de punto de control. Sin embargo, se comprenderá que las formas de realización proporcionadas en la presente memoria constituyen únicamente ejemplos de formas de realización y el ámbito de la invención... [Seguir leyendo]
Reivindicaciones:
1. Aparato (10) para la inspección de un objeto en búsqueda de un artículo peligroso, que comprende:
una unidad de pruebas (20) que incluye unas fuentes y/o un equipo de prueba; un compartimento; un sensor adaptado para generar una señal de salida; y una unidad de computación (40) para recibir y procesar la salida,
caracterizado porque:
la unidad de pruebas (20) presenta una pluralidad de superficies externas; el compartimento comprende una pluralidad de compartimentos (60a-60e) acoplados con la unidad de pruebas (20) , estando cada uno de los compartimentos colocado de manera adyacente a una de las superficies externas de la unidad de pruebas y estando configurado para contener el objeto que está siendo inspeccionado;
el sensor (66) está adaptado para generar una señal de salida que indica que el objeto en el respectivo compartimento ha accedido a las fuentes y/o al equipo de prueba en la unidad de pruebas; y
la unidad de computación (40) está destinada a recibir y procesar la señal de salida de cada uno de los 20 compartimentos.
2. Aparato según la reivindicación 1, en el que un sensor (66) está dispuesto en cada uno de los compartimentos (60a-60e) .
3. Aparato según la reivindicación 1, en el que el sensor (66) está dispuesto en la unidad de pruebas (20) y en el que el sensor lee una señal de salida de cada uno de los compartimentos que indica que el compartimento ha tenido acceso al recurso.
4. Aparato según la reivindicación 1, 2 o 3, en el que los compartimentos (60a-60e) tienen acceso al recurso 30 simultánea, o secuencialmente.
5. Aparato según la reivindicación 1, 2 o 3, en el que la unidad de pruebas (20) comprende un mecanismo de rotación para dirigir el recurso hacia un compartimento seleccionado de entre los compartimentos (60a-60e) .
7. Aparato según la reivindicación 5, en el que la unidad de pruebas (20) tiene una sección transversal hexagonal.
9. Aparato según la reivindicación 1, 2 o 3, en el que el recurso (20) comprende una fuente de radiación destinada a verificar los objetos en los compartimentos. 45
10. Aparato según la reivindicación 1, 2 o 3, en el que el recurso (20) comprende una unidad de inducción de campo magnético.
11. Aparato según la reivindicación 1, 3 o 3, en el que cada uno de los compartimentos (60a-60e) comprende un 50 mecanismo destinado a mover un objeto dentro y fuera del compartimento.
12. Aparato según la reivindicación 1, 2 o 3, en el que cada uno de los compartimentos (60a-60e) comprende un sensor de peso para detectar la presencia de un objeto, y en el que la unidad de pruebas comprende:
13. Aparato según la reivindicación 1, 2 o 3, en el que la unidad de pruebas (20) contiene una pluralidad de
un detector que lee cada sensor de peso; y un procesador que determina hacia qué compartimentos debe ser dirigido el recurso.
diferentes recursos. 60
14. Aparato según la reivindicación 1, 2 o 3, en el que las superficies externas de la unidad de pruebas (20) son planas y cada uno de los compartimentos (60a-60e) tiene por lo menos una superficie plana que está acoplada con una de las superficies externas de la unidad de pruebas.
Patentes similares o relacionadas:
Procedimiento y sistema de monitoreo, del 27 de Mayo de 2020, de MariCare Oy: Procedimiento para observar la presencia, ubicación, movimiento y/o postura de uno o más objetos a monitorear con un sistema de monitoreo, […]
DISPOSITIVO PORTÁTIL DE ALARMA, PROTECCIÓN Y DEFENSA CON DISPOSITIVO GSM, del 30 de Abril de 2020, de ROCHA CORTEZ, Douglas Rene: Este sistema de alarma compacto y portátil brinda al usuario la comunicación en dos vías es decir, puede enviar un aviso de alerta a teléfonos, diferenciando el tipo de evento, […]
Un procedimiento para operar un sistema de alarma para un edificio, sistema de alarma para un edificio e instalación de alarma, del 16 de Enero de 2020, de Verisure Sàrl: Un procedimiento para operar un sistema de alarma para un edificio, sistema de alarma para un edificio e instalación de alarma. La invención se […]
Disposición y método de supervisión de seguridad usando un campo de visión común, del 11 de Septiembre de 2019, de RSIalarm, Inc: Una disposición de seguridad integrada que comprende: un sensor de intrusión adaptado para generar una señal de intrusión en respuesta a la detección de una violación […]
CONJUNTO DOMÓTICO DE CONTROL Y COMUNICACIONES, del 6 de Febrero de 2019, de AUCORE S.L: 1. Conjunto domótico de control y comunicaciones caracterizado porque comprende: - Uno o varios módulos domóticos de zona - Una unidad central de comunicaciones , Donde […]
 Monitorización de seguridad con mapeo programable, del 20 de Junio de 2018, de RSI Video Technologies, Inc: Una disposición de seguridad integrada, que comprende:
una pluralidad de sensores de intrusión ;
un sensor de movimiento para […]
Monitorización de seguridad con mapeo programable, del 20 de Junio de 2018, de RSI Video Technologies, Inc: Una disposición de seguridad integrada, que comprende:
una pluralidad de sensores de intrusión ;
un sensor de movimiento para […]
 Dispositivo portátil detector de incendios y humo con alarma, del 22 de Octubre de 2015, de RIVAS CECILIA, Rafael Ulises: 1. Dispositivo portátil detector de incendios y humo con alarma, caracterizado por comprender una caja de conexión o carcasa con un enchufe .
2. Dispositivo […]
Dispositivo portátil detector de incendios y humo con alarma, del 22 de Octubre de 2015, de RIVAS CECILIA, Rafael Ulises: 1. Dispositivo portátil detector de incendios y humo con alarma, caracterizado por comprender una caja de conexión o carcasa con un enchufe .
2. Dispositivo […]
 DISPOSITIVO AVISADOR DE SINIESTROS EN EDIFICIOS, del 21 de Octubre de 2015, de FRADES SÁNCHEZ, Antonio Esteban: 1. Dispositivo avisador de siniestros en edificios, caracterizado porque dispone de un panel informativo en cada planta y/o escalera de un edificio, siendo […]
DISPOSITIVO AVISADOR DE SINIESTROS EN EDIFICIOS, del 21 de Octubre de 2015, de FRADES SÁNCHEZ, Antonio Esteban: 1. Dispositivo avisador de siniestros en edificios, caracterizado porque dispone de un panel informativo en cada planta y/o escalera de un edificio, siendo […]