Método y aparato para detectar continuamente la presencia de vehículos con un sensor óptico y un sensor magnético.
En la presente invención se describe un método y un aparato de detección continua,
no intermitente, de vehículos basado en la detección del cambio brusco de iluminación que se produce en el suelo de debajo de un vehículo cuando éste llega o sale, y en la utilización de dicha detección para activar un sensor magnético cuya sensibilidad está ajustada para detectar sólo aquellas anomalías magnéticas suficientemente grandes para poder ser atribuidas a un vehículo que esté sobre el sensor. Tanto el sensor de iluminación como el sensor magnético están conectados directamente a un controlador digital sin necesidad de componentes electrónicos activos ni de una fuente de alimentación propia o compartida. El detector puede ser fijo o portátil, inalámbrico o conectado mediante cables, y puede funcionar de forma independiente o como parte de una red de sensores.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/ES2010/000364.
Solicitante: UNIVERSITAT POLITECNICA DE CATALUNYA.
Nacionalidad solicitante: España.
Inventor/es: PALLAS ARENY,RAMON, CASAS PIEDRAFITA,JAIME OSCAR, SIFUENTES DE LA HOYA,ERNESTO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01V11/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01V GEOFISICA; MEDIDA DE LA GRAVITACION; DETECCION DE MASAS U OBJETOS; MARCAS O ETIQUETAS DE IDENTIFICACION (medios para indicar dónde se encuentran personas sepultadas accidentalmente, p. ej. por la nieve A63B 29/02). › Prospección o detección por métodos que combinan técnicas cubiertas por dos o más de los grupos principales especificadas en los grupos G01V 1/00 - G01V 9/00.
- G08G1/017 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › por identificación de los vehículos (G08G 1/015, G08G 1/054 tienen prioridad).
PDF original: ES-2428663_T3.pdf
Fragmento de la descripción:
Método y aparato para detectar continuamente la presencia de vehículos con un sensor óptico y un sensor magnético.
La presente invención se refiere a un método y un aparato para conocer si en una zona determinada hay algún vehículo presente, más particularmente a un método que se basa en un sensor de iluminación y un sensor magnético dispuestos en el suelo de dicha zona.
Objeto El objeto de la presente invención es desarrollar un método para detectar continuamente si en una zona predeterminada hay un vehículo presente, empleando para ello un sensor óptico pasivo que detecte la sombra producida por el vehículo, y un sensor magnético que confirme si dicha sombra es debida a un vehículo que está sobre el sensor, o puede que sea debida a otra causa que reduce la iluminación. Un segundo objeto de la presente invención es desarrollar un aparato que ofrezca una señal de salida que indique si en una zona predeterminada hay
o no un vehículo, y que tenga un consumo de energía suficientemente pequeño para poder funcionar con una pila.
Antecedentes de la invención Saber si hay un vehículo en una zona predeterminada es una necesidad común en la gestión de aparcamientos, pasos a nivel, salidas de emergencia, control de accesos, zonas de seguridad, y otras aplicaciones donde se deban tomar decisiones a partir de la presencia o ausencia de un vehículo en una zona concreta. En zonas cubiertas con algún tipo de techo, la presencia de un vehículo en una zona concreta se puede conocer mediante uno o más sensores colgados del techo o de una estructura sujeta a éste, y situados directamente sobre la zona que se desea vigilar. Una forma habitual de hacerlo es mediante sensores basados en algún tipo de radiación, por ejemplo ultrasonidos o radiación infrarroja, porque el tiempo de tránsito entre un emisor y un receptor depende de si la radiación enviada por el emisor se refleja en el suelo o en otro objeto más cercano, como puede ser la cubierta de un vehículo. Una solución alternativa, que no exige tener un sensor por cada zona específica que se desee vigilar, es poner una o más cámaras de televisión enfocadas hacia el área de interés. Mediante algoritmos de análisis de imágenes se puede conocer la cantidad de vehículos que hay en el área cubierta por las cámaras. Esta solución es técnicamente más compleja por cuanto hay que poder detectar vehículos que queden parcial o totalmente ocultos detrás de otros, y exige disponer de un soporte para montar la cámara o cámaras. En un edificio, este soporte se puede anclar en una pared o en el techo, pero en las zonas sin techo hay que poner algún tipo de poste.
Una alternativa más económica que las cámaras puede ser colocar detectores en el suelo de cada parcela que se desee vigilar. Para la detección se puede adaptar alguno de los métodos basados en la emisión y recepción de algún tipo de radiación que normalmente se aplican desde el techo. Pero es más simple basar la detección en un sistema pasivo que capte la alteración que la presencia de un vehículo produzca en alguna condición previa del entorno. Además, el consumo de energía de los detectores pasivos será inferior porque no hace falta crear dicha condición preexistente, a diferencia de los detectores basados en la emisión y recepción de radiación (radiofrecuencia, óptica, mecánica-ultrasonidos) que deben generar la radiación que emiten. En áreas de aparcamiento grandes, y en general donde no haya una infraestructura que permita un suministro inmediato de energía eléctrica a cada parcela vigilada, la posibilidad de alimentar cada detector con baterías reduce los costes de instalación. En estos casos, otra cualidad importante del detector es que su consumo de energía sea lo menor posible.
Una magnitud física que se puede medir en el suelo y que cambia al pasar un vehículo es la tensión mecánica en un elemento sobre el cual pase la rueda. Así, el documento WO/1996/01461 de Antonio Hernando Grande y col. describe un dispositivo para detectar vehículos estacionados que se basa en detectar la tensión mecánica que produce la rueda del vehículo a su paso sobre un hilo que tiene un extremo fijo en un soporte metálico y cuyo otro extremo está sujeto a un soporte semicircular donde se encuentra pegada una cinta de material magnético amorfo. Esta cinta constituye el núcleo de un arrollamiento que recoge la fuerza electromotriz inducida al paso de la rueda sobre el hilo. Se aprecia que, igual como sucede con los sensores piezoeléctricos, tubos neumáticos y espiras inductivas, que detectan un cambio transitorio breve debido al paso del vehículo, este sensor tiene que estar continuamente en estado activo, con el consiguiente consumo de energía, y no puede detectar vehículos estacionados. Además, un vehículo que, por ejemplo, pase sobre el sensor cuando va hacia otra plaza de aparcamiento, dará una señal al pasar sobre el sensor de cada plaza, pero acabará estacionado en una plaza concreta, con lo cual el recuento de detecciones es mayor que el número de vehículos estacionados.
Otra magnitud física que queda alterada con el paso de un vehículo, e incluso con su mera presencia, es el campo magnético, porque el abundante material ferromagnético en los vehículos provoca una anomalía del campo magnético terrestre que perdura mientras el vehículo esté presente. Dicha anomalía se puede detectar por ejemplo mediante sensores magnetorresistivos (basados en el efecto magnetorresistivo, anisótropo-AMR o gigante-GMR) y por ello este método se ha aplicado mucho para detectar el paso de vehículos y un poco menos para detectar su presencia [véanse por ejemplo: M. J. Caruso, L. S. Withanawasam, “Vehicle Detection and Compass Applications using AMR Magnetic Sensors” http://www.ssec.honeywell.com/magnetic/datasheets/amr.pdf; P. Ripka, “Magnetic sensors for traffic control, ” Proceedings of the International Symposium on Measurement and Control in Robotics (ISMCR 99) , Tokio, vol. 10, pp. 241–246, 1999; G. Rouse, H. French, H. Sasaki “A solid-state vehicle detector for roadway applications, ” IEEE Proceedings on Vehicle Navigation and Information Systems Conference, Seattle, USA, pp. 11-16, July 1995; S. V. Marshall, “Vehicle Detection Using a Magnetic Field Sensor, ” IEEE Transactions on Vehicular Technology, vol. 27, no. 2, pp. 65-68, May 1978; R. Lao, D. Czajkowski, “Magnetorresistors for Automobile Detection and Traffic Control, ” Sensors, pp. 70-73, April 1996]. Para detectar un vehículo basta con medir la anomalía magnética en la dirección de la componente predominante del campo magnético terrestre, que cambia de unos a otros puntos de la Tierra, según la latitud, aunque también se puede detectar un vehículo midiendo en otras direcciones.
Un problema común a todas estas aplicaciones basadas en magnetorresistores es que el consumo de energía de estos sensores es relativamente alto porque su resistencia eléctrica es del orden de 1 kΩ a 5 kΩ, y por lo tanto si se les alimenta de forma continua pueden agotar una pila en un tiempo muy breve. Si hay más de un sensor, por ejemplo en nodos sensores que incluyen un sensor magnético para detectar vehículos y varios sensores específicos para conocer las condiciones ambientales (temperatura, lluvia, hielo, etc.) , y el sistema no tiene ninguna conexión mediante hilos, por ejemplo tal como describe el documento US20060202863A1 de Robert Kavaler, el problema del consumo de energía es aún más grave. Además, los refinamientos en magnetómetros basados en magnetorresistores aplicados a la detección de vehículos, utilizan un convertidor analógico-digital como medio para obtener una señal digital correspondiente a la anomalía magnética medida, y dicho convertidor exige un acondicionamiento de la salida del sensor magnético, que se realiza mediante amplificadores, tal como se describe por ejemplo en los documentos US5491475 de Gordon F. Rouse y William M. Volna, y US6546344 de James A. Rodrian y Donald R. Janke. Estos circuitos de acondicionamiento de señal con amplificadores, filtros, etc., conllevan un consumo de energía adicional.
Un sistema obvio para reducir el consumo de energía es alimentar el detector de forma intermitente en intervalos de tiempo predeterminados. Pero si se quiere tener una detección de presencia o ausencia fiable, dichos intervalos deben ser suficientemente breves, y en consecuencia el ahorro de energía dependerá mucho del régimen de ocupación de la zona. El documento US200201090856 de Charles K. Howard describe una solución para evitar que el sensor magnético tenga que estar funcionando continuamente. Consiste en emplear un sensor de vibración que detecte la vibración del suelo producida por un vehículo... [Seguir leyendo]
Reivindicaciones:
1. Método para la detección continua de la presencia de un vehículo estático en una zona predeterminada,
caracterizado porque se realiza desde el suelo y utiliza un doble principio de medida basado en un sensor óptico 5 pasivo y en un sensor de campo magnético, donde:
- dicho sensor óptico pasivo y dicho sensor de campo magnético están conectados a un controlador digital, desde el cual son activados y alimentados;
- en un estado de espera, dicho controlador digital permanece en un estado de bajo consumo y alimenta dicho sensor óptico pasivo, mientras que dicho sensor de campo magnético no recibe ninguna alimentación;
- en dicho estado de espera, dicho sensor óptico pasivo detecta el nivel de iluminación y, cuando dicho nivel de iluminación detectado es inferior a un valor predefinido, despierta a dicho controlador digital de su estado de
bajo consumo y este último activa y alimenta a dicho sensor de campo magnético para que confirme la presencia de un vehículo mediante la detección y la cuantificación de una anomalía magnética en una dirección en la cual el campo magnético de la Tierra es grande de acuerdo con la latitud de la zona donde se usa.
2. Método según la reivindicación 1, donde:
- en dicho estado de espera, dicho controlador digital funciona en un modo que no requiere ninguna señal de reloj y del cual sale cuando recibe una interrupción externa desde dicho sensor óptico pasivo cuando el nivel de iluminación detectado es inferior al valor predefinido;
- al recibir dicha interrupción externa, dicho controlador digital pasa a funcionar con un reloj, activa y alimenta a dicho sensor de campo magnético, obtiene de dicho sensor de campo magnético un valor del campo magnético y deduce un cambio en el campo magnético con respecto a un valor de referencia del campo magnético obtenido en ausencia de vehículo;
- si el cambio en el campo magnético es mayor que un valor predeterminado, el controlador digital genera una señal que indica la presencia de un vehículo y obtiene periódicamente de dicho sensor de campo magnético nuevos valores del campo magnético;
- cuando, después de haber generado dicha señal que indica la presencia de un vehículo, el cambio en el campo magnético se torna inferior al valor predeterminado, dicho controlador digital genera una señal de ausencia de vehículo y vuelve a dicho estado de espera.
3. Método según la reivindicación 2, donde:
- si inmediatamente después de que dicho controlador digital haya recibido dicha interrupción externa, porque el nivel de iluminación detectado por dicho sensor óptico pasivo es inferior al valor predefinido, el cambio en el campo magnético es inferior al valor predeterminado, dicho controlador digital obtiene periódicamente un valor del nivel de iluminación detectado por dicho sensor óptico pasivo y un valor del campo magnético
proporcionado por dicho sensor de campo magnético;
- si el cambio en el campo magnético es superior al valor predeterminado, el controlador digital genera una señal que indica la presencia de un vehículo y sigue obteniendo periódicamente un valor del nivel de iluminación detectado por dicho sensor óptico pasivo y un valor del campo magnético proporcionado por dicho sensor de campo magnético;
- si el cambio en el campo magnético es inferior al valor predeterminado, o el nivel de iluminación detectado no es inferior al valor predefinido, dicho controlador digital genera una señal que indica la ausencia de un vehículo y vuelve a dicho estado de espera;
- en todo momento, si el cambio en el campo magnético es mayor que el valor predeterminado y el nivel de iluminación detectado no es inferior al valor predefinido, el controlador digital genera una señal de alarma.
4. Método según cualquiera de las reivindicaciones 1 a 3, donde los modos de funcionamiento y la frecuencia de reloj de dicho controlador digital cambian de forma dinámica en función de las señales obtenidas de dicho sensor óptico pasivo y dicho sensor de campo magnético.
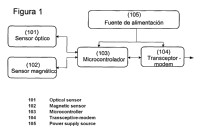
5. Aparato adaptado para realizar el método según la reivindicación 1, caracterizado porque comprende un controlador digital, un sensor óptico pasivo para detectar un nivel de iluminación y un sensor de campo magnético
para detectar y cuantificar una anomalía magnética en una dirección en la cual el campo magnético de la Tierra es grande de acuerdo con la latitud de la zona donde se usa, dicho sensor óptico pasivo y dicho sensor de campo magnético siendo activados y alimentados desde dicho controlador digital, y porque dicho controlador digital está configurado para realizar las acciones siguientes:
-en un estado de espera, permanecer en un estado de bajo consumo y alimentar dicho sensor óptico pasivo, 5 sin suministrar ninguna alimentación a dicho sensor de campo magnético;
- en dicho estado de espera, ser despertado de su estado de bajo consumo por dicho sensor óptico pasivo cuando este último detecta un nivel de iluminación inferior a un valor predefinido, y activar y alimentar a dicho sensor de campo magnético para que confirme la presencia de un vehículo mediante la detección y la cuantificación de una anomalía magnética en una dirección en la cual el campo magnético de la Tierra es grande de acuerdo con la latitud de la zona donde se usa.
6. Aparato según la reivindicación 5, donde dicho controlador digital está configurado para realizar además las acciones siguientes: 15
- en dicho estado de espera, funcionar en un modo que no requiere ninguna señal de reloj y salir de éste cuando recibe una interrupción externa desde dicho sensor óptico pasivo cuando el nivel de iluminación detectado es inferior al valor predeterminado;
- al recibir dicha interrupción externa, pasar a funcionar con un reloj, activar y alimentar a dicho sensor de campo magnético, obtener de dicho sensor de campo magnético un valor del campo magnético y deducir un cambio en el campo magnético con respecto a un valor de referencia del campo magnético obtenido en ausencia de vehículo;
- si el cambio en el campo magnético es mayor que un valor predeterminado, generar una señal que indica la presencia de un vehículo y obtener periódicamente de dicho sensor de campo magnético nuevos valores del campo magnético;
- cuando, después de haber generado dicha señal que indica la presencia de un vehículo, el cambio en el campo magnético se torna inferior al valor predeterminado, generar una señal de ausencia de vehículo y volver a dicho estado de espera.
7. Aparato según la reivindicación 6, donde dicho controlador digital está configurado para realizar además las acciones siguientes: 35
- si inmediatamente después de haber recibido dicha interrupción externa, porque el nivel de iluminación detectado por dicho sensor óptico pasivo es inferior al valor predefinido, el cambio en el campo magnético es inferior al valor predeterminado, obtener periódicamente un valor del nivel de iluminación detectado por dicho sensor óptico pasivo y un valor del campo magnético proporcionado por dicho sensor de campo magnético;
- si el cambio en el campo magnético es superior al valor predeterminado, generar una señal que indica la presencia de un vehículo y seguir obteniendo periódicamente un valor del nivel de iluminación detectado por dicho sensor óptico pasivo y un valor del campo magnético proporcionado por dicho sensor de campo magnético;
- si el cambio en el campo magnético es inferior al valor predeterminado, o el nivel de iluminación detectado no es inferior al valor predefinido, generar una señal que indica la ausencia de un vehículo y volver a dicho estado de espera;
- en todo momento, si el cambio en el campo magnético es mayor que el valor predeterminado y el nivel de iluminación detectado no es inferior al valor predefinido, generar una señal de alarma.
8. Aparato según cualquiera de las reivindicaciones 1 a 7, donde dicho controlador digital está configurado de manera que cambia de forma dinámica sus modos de funcionamiento y la frecuencia de reloj en función de las 55 señales obtenidas de dicho sensor óptico pasivo y dicho sensor de campo magnético.
9. Aparato según cualquiera de las reivindicaciones 5 a 8, donde dicho sensor óptico pasivo es un sensor de iluminación resistivo LDR (Light-Dependent Resistor) y dicho sensor de campo magnético es un puente de magnetorresistencias.
10. Aparato según la reivindicación 9, donde el circuito de interfaz para dicho sensor de iluminación resistivo LDR es un divisor de tensión alimentado desde una salida de dicho controlador digital, a la vez que la salida de dicho divisor de tensión se conecta directa y simultáneamente a una entrada de interrupciones externas y a la entrada de un convertidor analógico-digital del mismo controlador digital.
11. Aparato según cualquiera de las reivindicaciones 5 a 10, donde dicho sensor de campo magnético se conecta directamente a puertos digitales de entrada y salida de dicho controlador digital, sin que ningún componente electrónico activo medie entre dicho sensor de campo magnético y dicho controlador digital.
Patentes similares o relacionadas:
Sistema y dispositivo de señales para la entrada y salida de vehículos de un aparcamiento, del 17 de Diciembre de 2019, de RODRIGUEZ BARROS, ALEJANDRO: Sistema de señales para la entrada y salida de vehículos de un aparcamiento, comprende dispositivos activos asociados a unos elementos pasivos (P1), (BL2), (RU) y a un […]
 Identificación de vehículo, del 31 de Octubre de 2019, de QINETIQ LIMITED: Un método para identificar un transmisor alojado en vehículo que emite una señal de interferencia sobre una banda de frecuencia predefinida, comprendiendo el método
monitorizar […]
Identificación de vehículo, del 31 de Octubre de 2019, de QINETIQ LIMITED: Un método para identificar un transmisor alojado en vehículo que emite una señal de interferencia sobre una banda de frecuencia predefinida, comprendiendo el método
monitorizar […]
Interfaz de búsqueda y reproducción de vídeo para la supervisión de vehículos, del 6 de Mayo de 2019, de HONEYWELL INTERNATIONAL INC.: Un procedimiento, que comprende: grabar fragmentos de vídeo respectivos de un área supervisada a partir de cada una cámara de una pluralidad de cámaras; proporcionar […]
Un sistema para uso en puestos de peajes de carretera, del 21 de Febrero de 2019, de KAPSCH TRAFFICCOM AB: Un sistema para su uso en puestos de peajes de carretera, que comprende un primer aparato óptico para grabar imágenes de una calzada y un segundo […]
Identificadores de comunicación de vehículos en base a la información de la placa de matrícula, del 14 de Febrero de 2019, de Nokia Technologies OY: Un procedimiento que comprende: recibir, desde un sensor, una imagen de un vehículo que incluye información de identificación del vehículo ; […]
Sistema de identificación y/o monitorización de vehículo, del 23 de Octubre de 2018, de Licensys Australasia Pty Ltd: Un aparato el cual puede funcionar para detectar e identificar vehículos, donde los vehículos individuales tienen cada uno al menos un dispositivo de comunicación RFID con una […]
Sistema mejorado para identificar un vehículo, del 17 de Octubre de 2018, de I.CAR S.r.l. (100.0%): Un sistema de identificación para un vehículo, que comprende: - al menos un elemento de identificación accesible para ser aplicado, […]
Procedimiento para la asignación de un emisor a un objeto a detectar, en la comunicación de vehículo a vehículo, y vehículo, del 23 de Mayo de 2018, de AUDI AG: Procedimiento para la asignación de un emisor, el cual transmite al menos una información de comunicación en una comunicación de vehículo a vehículo, a un objeto descrito mediante […]