Dispositivo electromecánico para medir la inclinación de un plano de apoyo con elevada resolución, elevada exactitud y baja sensibilidad a perturbaciones externas.
Un dispositivo electromecánico (1) para medir la inclinación de un plano de apoyo con elevada resolución,
elevada exactitud y baja sensibilidad a perturbaciones externas, que comprende un primer sistema de péndulo electromecánico (2) controlado en un bucle cerrado para medir las rotaciones estáticas de un péndulo invertido (3) que está pivotado a una estructura de soporte (4) que puede asociarse con el plano de apoyo (5) cuya inclinación ha de ser medida midiendo el par mecánico requerido para mantener a dicho péndulo invertido (3) en una posición neutral, es decir, sustancialmente perpendicular a dicho plano de apoyo (5), mediante primeros medios motor (10) que están asociados con dicho péndulo invertido y actúan sobre él como una función de su desviación angular de dicha posición neutral medida por primeros medios sensores de posición (8) asociados con dicho péndulo invertido (3), y comprendiendo además un segundo sistema de péndulo electromecánico (6) que está controlado en un bucle cerrado para medir las rotaciones dinámicas de un péndulo equilibrado (7) que está pivotado a dicha estructura de soporte (4) mediante segundos medios sensores de posición (9) que están asociados con dicho péndulo equilibrado (7) e interactúan con segundos medios motor (11) que están asociados con dicho péndulo equilibrado (7).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IT2008/000346.
Solicitante: Microgate S.r.l.
Inventor/es: BIASI,ROBERTO, PESCOLLER,DIETRICH.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C9/12 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 9/00 Medida de la inclinación, p. ej. mediante inclinómetros, mediante niveles. › mediante la utilización de un único péndulo (plomadas G01C 15/10).
- G01C9/16 G01C 9/00 […] › mediante la utilización de más de un péndulo.
PDF original: ES-2538402_T3.pdf
Fragmento de la descripción:
Dispositivo electromecánico para medir la inclinación de un plano de apoyo con elevada resolución, elevada exactitud y baja sensibilidad a perturbaciones externas.
Campo técnico
La presente invención hace referencia a un dispositivo electromecánico para medir la inclinación de 5 un plano de apoyo con elevada resolución, elevada exactitud y baja sensibilidad a perturbaciones externas, tal como por ejemplo perturbaciones magnéticas o térmicas o aceleraciones en el plano, etcétera.
Estado de la técnica
Actualmente, dispositivos conocidos, diseñados para medir la inclinación de un plano de apoyo y/o similares y conocidos comúnmente como inclinómetros están disponibles comercialmente. 10
Más precisamente, los principales campos de uso de tales tipos de dispositivo pueden ser los siguientes:
- corrección metrológica de sistemas de objetivos que requieren precisión en términos absolutos, tales como por ejemplo telescopios;
- control de la estabilidad del suelo, tal como por ejemplo para predecir corrimientos de tierra; 15
- control de estructuras civiles, tales como por ejemplo monumentos;
- control geodésico en regiones afectadas por fenómenos volcánicos o de bradiseísmo;
- análisis dinámicos de estructuras civiles.
Los dispositivos conocidos están basados en el clásico nivel de burbuja, en el que la burbuja de aire normalmente está sustituida por un electrolito y la medición ocurre por medios electrónicos, permitiendo un 20 elevado grado de resolución y exactitud.
Estos tipos de dispositivos conocidos no están exentos de inconvenientes, los cuales incluyen el hecho de que si el plano cuya inclinación ha de ser medida está sometido a movimientos horizontales, son incapaces de distinguir entre inclinación y aceleraciones horizontales orientadas en ángulos rectos al vector de gravedad. 25
Este problema ocurre particularmente en el uso de sistemas de objetivos, tales como por ejemplo telescopios.
En tales aplicaciones, los tipos de dispositivos conocidos están colocados típicamente en la plataforma azimut y, durante los rápidos movimientos de selección de objetivos de telescopios, están sometidos a grandes aceleraciones horizontales que provocan que la medición no sea fiable. 30
Además, tales aceleraciones horizontales pueden llevar también a la saturación del dispositivo, impidiendo que realice la medición.
Otro inconveniente de los tipos de dispositivos conocidos consiste en que son dinámicamente lentos si el inclinómetro es llevado a saturación como consecuencia de elevadas inclinaciones.
Los tiempos de reajuste para realizar una lectura adecuada de tales dispositivos pueden alcanzar 35 incluso varios minutos. Tales tiempos largos pueden ocurrir como consecuencia de la saturación del dispositivo que puede conllevar la inmersión total de los detectores en el líquido que está presente dentro del dispositivo.
Para permitir al sistema asentarse de nuevo y permitir al detector estar completamente seco, es inevitablemente necesario permitir que pase algún tiempo. 40
US-3, 983, 6356 muestra un sistema de control hidráulico de nivel fluídico en el que un péndulo invertido es utilizado en conjunción con dos sensores de proximidad para proveer una señal de salida proporcional a la desviación angular.
US-A1-2002/166756 muestra un sensor de inclinación que utiliza un péndulo invertido.
El objetivo de la presente invención es proveer un dispositivo que permita mediciones de la 45 inclinación de un plano de apoyo con una elevada resolución, elevada exactitud y baja sensibilidad a perturbaciones externas tales como por ejemplo perturbaciones magnéticas o térmicas o aceleraciones en el plano.
Dentro de este objetivo, un objeto de la presente invención es proveer un dispositivo que sea dinámicamente rápido.
Otro objeto de la presente invención es proveer un dispositivo que sea altamente fiable, 5 relativamente simple de proveer y con costes competitivos.
Este objetivo y estos y otros objetos que resultarán aparentes de mejor modo a continuación se consiguen mediante un dispositivo electromecánico para medir la inclinación de un plano de apoyo con elevada resolución, elevada exactitud y baja sensibilidad a perturbaciones externas, tal y como se define en la reivindicación 1. 10
Otras características y ventajas de la invención resultarán aparentes de mejor modo a partir de la descripción de un ejemplo de realización preferido pero no exclusivo de un dispositivo electromecánico para medir la inclinación de un plano de apoyo con elevada resolución, elevada exactitud y baja sensibilidad a perturbaciones externas, según la presente invención, ilustrada mediante ejemplo no limitador en los dibujos que acompañan, en los que: 15
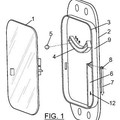
la figura 1 es un diagrama esquemático de un dispositivo según la presente invención;
la figura 2 es una representación esquemática del péndulo invertido según la presente invención;
la figura 3 es una representación esquemática del péndulo equilibrado según la presente invención.
Con referencia a las figuras, el dispositivo electromecánico para medir la inclinación del plano de apoyo con elevada resolución, elevada exactitud y baja sensibilidad a perturbaciones externas, 20 generalmente designado por el número de referencia 1, comprende un primer sistema de péndulo electromecánico 2 (con un punto fijo designado por el número de referencia 1000) , controlado en un bucle cerrado para medir las rotaciones estáticas de un péndulo invertido 3 pivotado a una estructura de soporte 4 que puede estar asociada con el plano de apoyo 5 cuya inclinación ha de ser medida, respecto de una posición de comienzo designada por 5a, y un segundo sistema de péndulo electromecánico 6 (con un punto 25 fijo designado por el número de referencia 1000) , también controlado en un bucle cerrado y adaptado para medir las rotaciones dinámicas de un péndulo equilibrado 7 pivotado a la estructura de soporte 4.
La inclinación del plano de apoyo 5 está representada por el grado de libertad O1.
La medición de las rotaciones estáticas del péndulo invertido 3, representada por el grado de libertad O2, se realiza midiendo el par mecánico requerido para mantener al péndulo invertido 3 en la posición 30 neutral, es decir, sustancialmente perpendicular al plano de apoyo 5, mediante primeros medios motor que están asociados con el péndulo invertido 3 y actúan allí como una función de su desviación angular de la posición neutral.
Esta desviación angular es medida por primeros medios de sensor de posición 8 asociados con el péndulo invertido 3. 35
El par requerido para mantener el péndulo invertido 3 en la posición neutral es designado por el vector Mc.
La medición de las rotaciones dinámicas del péndulo equilibrado 7, representada por el grado de libertad O3, es realizada mediante segundos medios sensores de posición 9 que están asociados con el péndulo equilibrado 7 e interactúan con segundos medios motor que están también asociados con el 40 péndulo equilibrado 7.
En el ejemplo de realización ilustrado, los primeros medios motor y los segundos medios motor respectivamente comprenden motores electromagnéticos 10 y 11, cada uno de los cuales comprende un actuador VCM 12 movido por un controlador 13.
Tanto los primeros medios sensores de posición 8 como los segundos medios de posición 9, para el 45 cierre del correspondiente bucle de control, pueden comprender un par de sensores capacitivos que operan diferencialmente.
La elección de motores electromecánicos como actuadores y de sensores capacitivos como sensores emana de una elección técnica específica que no es vinculante en modo alguno.
Las mediciones de las rotaciones estáticas y dinámicas de los dos péndulos 3 y 7, medidas respectivamente por los dos sistemas electromecánicos 2 y 6, son procesadas por medios de procesamiento de datos 14 que están asociados con los dos sistemas electromecánicos para calcular la inclinación O1.
Tal y como se explicará con mayor detalle a continuación, con el fin de limpiar de la medición de las 5 rotaciones estáticas del péndulo invertido 3 las rotaciones dinámicas que están presentes también en el péndulo invertido 3, se provee un filtro de paso bajo 15, el cual está interpuesto entre la salida del primer sistema electromecánico 2 y los medios de procesamiento de datos 14 con el fin de filtrar, con una frecuencia de corte preestablecida, las mediciones hechas por el primer sistema electromecánico 2.
Preferiblemente, la frecuencia de corte es igual a 0.5Hz.... [Seguir leyendo]
Reivindicaciones:
1. Un dispositivo electromecánico (1) para medir la inclinación de un plano de apoyo con elevada resolución, elevada exactitud y baja sensibilidad a perturbaciones externas, que comprende un primer sistema de péndulo electromecánico (2) controlado en un bucle cerrado para medir las rotaciones estáticas de un péndulo invertido (3) que está pivotado a una estructura de soporte (4) que puede asociarse con el 5 plano de apoyo (5) cuya inclinación ha de ser medida midiendo el par mecánico requerido para mantener a dicho péndulo invertido (3) en una posición neutral, es decir, sustancialmente perpendicular a dicho plano de apoyo (5) , mediante primeros medios motor (10) que están asociados con dicho péndulo invertido y actúan sobre él como una función de su desviación angular de dicha posición neutral medida por primeros medios sensores de posición (8) asociados con dicho péndulo invertido (3) , y comprendiendo además un 10 segundo sistema de péndulo electromecánico (6) que está controlado en un bucle cerrado para medir las rotaciones dinámicas de un péndulo equilibrado (7) que está pivotado a dicha estructura de soporte (4) mediante segundos medios sensores de posición (9) que están asociados con dicho péndulo equilibrado (7) e interactúan con segundos medios motor (11) que están asociados con dicho péndulo equilibrado (7) .
2. El dispositivo según la reivindicación 1, caracterizado por el hecho de que comprende medios de 15 procesamiento de datos (14) que están asociados con dichos primer (2) y segundo (6) sistemas electromecánicos para calcular dicha inclinación.
3. El dispositivo según una o más de las anteriores reivindicaciones, caracterizado por el hecho de que dicho péndulo invertido (3) es obtenido monolíticamente con dicha estructura de soporte (4) , con la interposición entre ellos de una primera porción de material que es lo bastante flexible elásticamente como 20 para proveer un acoplamiento de bisagra.
4. El dispositivo según una o más de las anteriores reivindicaciones, caracterizado por el hecho de que dicho péndulo equilibrado (7) es obtenido monolíticamente con dicha estructura de soporte (4) , con la interposición entre ellos de una segunda porción de material que es lo bastante flexible elásticamente como para proveer un acoplamiento de bisagra. 25
5. El dispositivo según una o más de las anteriores reivindicaciones, caracterizado por el hecho de que dichos primeros medios motor (10) comprenden primeros motores electromagnéticos.
6. El dispositivo según una o más de las anteriores reivindicaciones, caracterizado por el hecho de que dichos primeros medios sensores de posición (8) comprenden primeros sensores capacitivos.
7. El dispositivo según una o más de las anteriores reivindicaciones, caracterizado por el hecho de 30 que segundos medios motor (11) comprenden segundos motores electromagnéticos.
8. El dispositivo según una o más de las anteriores reivindicaciones, caracterizado por el hecho de que dichos segundos medios sensores de posición (9) comprenden segundos sensores capacitivos.
9. El dispositivo según una o más de las anteriores reivindicaciones, caracterizado por el hecho de que comprende un filtro de paso bajo (15) que está interpuesto entre la salida de dicho primer sistema 35 electromecánico (2) y dichos medios de procesamiento de datos (14) y está adaptado para filtrar con una frecuencia de corte preestablecida las mediciones realizadas por dicho primer sistema electromecánico (2) .
10. El dispositivo según la reivindicación 9, caracterizado por el hecho de que dicha frecuencia de corte es preferiblemente igual a 0.5 Hz.
11. El dispositivo según una o más de las anteriores reivindicaciones, caracterizado por el hecho de 40 que comprende medios de conversión de medición (16) que están interpuestos entre dicho segundo sistema electromecánico (6) y dichos medios de procesamiento de datos (14) para convertir la medición de dicha rotación dinámica de dicho péndulo equilibrado (7) en un formato que sea compatible con la medición de dicha rotación estática de dicho péndulo invertido (3) .
Patentes similares o relacionadas:
Estructura de disposición de sensor de ángulo de inclinación para vehículos, del 27 de Septiembre de 2017, de HONDA MOTOR CO., LTD.: Un vehículo que tiene al menos tres ruedas y una estructura de disposición de sensor de ángulo de inclinación , incluyendo dicho vehículo una pluralidad de […]
 INDICADOR DE ÁNGULOS DE INCLINACIÓN VERTICAL, del 2 de Julio de 2012, de CAÑAS Y GOMEZ S.L.: Indicador de ángulos de inclinación vertical, que comprende una carcasa dentro de la que se alojan un primer dispositivo de contrapeso y un segundo dispositivo […]
INDICADOR DE ÁNGULOS DE INCLINACIÓN VERTICAL, del 2 de Julio de 2012, de CAÑAS Y GOMEZ S.L.: Indicador de ángulos de inclinación vertical, que comprende una carcasa dentro de la que se alojan un primer dispositivo de contrapeso y un segundo dispositivo […]
MEJORAS EN LA PATENTE DE INVENCION 200102676 POR "DISPOSITIVO DE CONTROL DE MANIOBRABILIDAD EN BASCULACION DE CARGAS"., del 1 de Noviembre de 2006, de BOTELLA GALLARDO,RAFAEL HERNANDEZ MARCO,MATIAS GALVAN MIRA,ANTONIO: A partir de un péndulo montado con libertad de basculación sobre un aro soporte a través de un eje , las mejoras consisten en disponer a un […]
MEJORAS EN LA PATENTE DE INVENCION Nº P200102676, POR "DISPOSITIVO DE CONTROL DE MANIOBRABILIDAD EN BASCULACION DE CARGA"., del 16 de Septiembre de 2005, de BOTELLA GALLARDO,RAFAEL HERNANDEZ MARCO,MATIAS GALVAN MIRA,ANTONIO: El dispositivo de la P200102676 se basa en un péndulo montado con libertad de basculación sobre un soporte establecido al efecto en la caja basculante […]
SENSOR DE INCLINACION., del 1 de Abril de 2005, de TEMIC TELEFUNKEN MICROELECTRONIC GMBH: SE DA A CONOCER UN SENSOR DE INCLINACION PARA LA DETECCION DE UN ANGULO DE VUELCO, EN PARTICULAR COMO SENSOR DE VUELCO EN UN VEHICULO DE TRANSPORTE PARA DISPARO DE UN DISPOSITIVO […]
DISPOSITIVO PARA LA CONSTRUCCION O COMPROBACION DEL PARALELISMO O PERPENDICULARIDAD DE DETERMINADO PLANO RESPECTO DEL PLANO TERRESTRE., del 16 de Enero de 2005, de CLARAMONTE LAHOZ,PASCUAL: 1. Dispositivo para la construcción o comprobación del paralelismo o perpendicularidad de determinado plano respecto del plano terrestre […]
DISPOSITIVO DE CONTROL DE MANIOBRABILIDAD EN BASCULACION DE CARGAS, del 16 de Septiembre de 2004, de BOTELLA GALLARDO,RAFAEL HERNANDEZ MARCO,MATIAS GALVAN MIRA,ANTONIO: El dispositivo está previsto para su aplicación en cajas basculantes de vehículos de transporte, para evitar el vuelco, ante la detección de una excesiva […]
INDICADOR DE ANGULOS PARA INDICAR DOS DIRECCIONES PERPENDICULARES ENTRE SI., del 16 de Enero de 1980, de LARS A. BERGKVIST: Indicador de ángulos para indicar dos direcciones perpendiculares entre si, que comprende dos dispositivos indicadores de ángulos cada uno de los cuales comprende un […]