Procedimiento de detección de la posición de un vehículo estacionado.
Procedimiento de detección de una posición de un primer vehículo (2) estacionado,
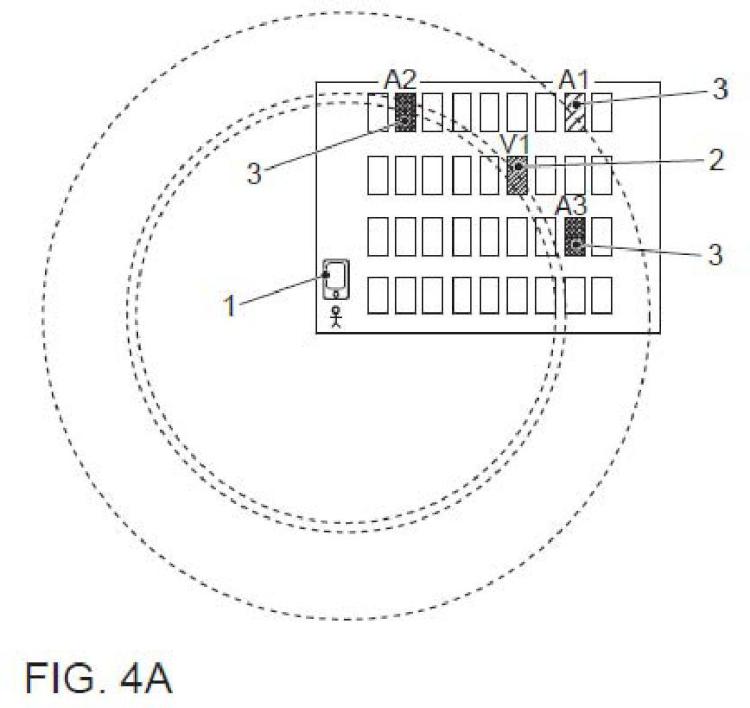
vinculado con un dispositivo electrónico móvil (1), en donde el primer vehículo (2) establece comunicación con al menos tres vehículos (2, 3) estacionados, genera una base de datos (5) con unas identificaciones de cada vehículo y unas distancias del dispositivo electrónico móvil (1) respecto a estos al menos tres vehículos (2, 3) estacionados, recibe en el dispositivo electrónico móvil (1) una tabla de posición (4) que comprende unas identificaciones de cada vehículo y unas distancias entre los vehículos (2, 3) estacionados, emite a través del dispositivo electrónico móvil (1) indicaciones para facilitar que el dispositivo electrónico móvil alcance la posición del primer vehículo (2), habilitando que un usuario que ha aparcado el vehículo (2) en una zona sin cobertura GPS, pueda ser guiado hasta su vehículo (2) con el fin de poder encontrarlo fácilmente.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201530860.
Solicitante: SEAT, S.A..
Inventor/es: MORENO PAREJO,Alejandro.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G08G1/13 FISICA. › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › teniendo el indicador forma de mapa.
- G08G1/137 G08G 1/00 […] › teniendo el indicador forma de mapa.
- G08G1/14 G08G 1/00 […] › que indican las plazas libres individuales en parques de estacionamiento.
Fragmento de la descripción:
Procedimiento de detección de la posición de un vehículo estacionado
OBJETO DE LA INVENCIÓN
La presente solicitud de patente tiene por objeto un procedimiento de detección de la posición de un vehículo estacionado, según la reivindicación 1, que incorpora notables innovaciones y ventajas. 10
ANTECEDENTES DE LA INVENCIÓN
En el estado de la técnica hay diversas soluciones conocidas de procedimientos de 15 detección de la posición de un vehículo estacionado.
Es conocido del estado de la técnica, según se refleja en el documento "Intelligent Indoor Parking", de la Universidad de Budapest, un sistema de navegación de vehículos en interiores para la aplicación concreta de estacionamiento, al objeto de disminuir la 20 circulación innecesaria en los garajes y reducir la contaminación del aire. En concreto se divulga un sistema de posicionamiento y navegación que supervisa la ocupación de los estacionamientos y, con la ayuda de una infraestructura inalámbrica Wi-Fi, sigue la posición desde la entrada del vehículo en el garaje, guiando al conductor a una plaza de aparcamiento libre. La interfaz de navegación es el smartphone del conductor. Es por tanto 25 necesaria la inclusión de una infraestructura inalámbrica fija y una digitalización del parking, todo ello válido únicamente para dicho aparcamiento en cuestión.
Es por otro lado conocido del estado de la técnica, según se refleja en el documento US8643510, una llave de vehículo para la comunicación por radio con dicho vehículo. La 30 llave del vehículo tiene un transmisor de radio para la transmisión de señales. En concreto tiene un receptor de radio y/o audio para poder localizar el vehículo dentro de una corta distancia. Dicha localización es realizada mediante una comunicación bidireccional con un transceptor del vehículo, en comunicación con el receptor de radio y/o el receptor de audio y el transmisor de radio. Se describe además un método enfocado a localizar el vehículo mediante el uso de la llave del vehículo.
Es también conocido del estado de la técnica, según se refleja en el documento US2009264082, un aparato y un método para determinar el rumbo y la distancia entre un 5 dispositivo móvil y un objeto utilizando mediciones basadas en radiofrecuencia. El dispositivo móvil se comunica con el objeto de determinar la orientación relativa entre el dispositivo móvil y el objeto con respecto al norte magnético y, opcionalmente, la distancia entre el dispositivo móvil y el objeto. El dispositivo móvil puede ser un llavero de control remoto y el objeto puede ser un vehículo. Es por tanto necesaria la inclusión de aparatos 10 capaces de medir el norte magnético como magnetómetros, teniendo como consecuencia un incremento notable de costes del aparato.
Es por otro lado conocido del estado de la técnica, según se refleja en el documento "A GPS-less Method to Find Your Parked Car", divulgado en una conferencia sobre automoción 15 en Pittsburg, Pennsylvania, USA, un procedimiento para encontrar un vehículo en una amplia zona de aparcamiento. Pulsando un botón en el llavero, el cual se utiliza por lo general para bloquear o desbloquear de forma remota el vehículo, los vehículos en el entorno del usuario formar una corriente de luz encendiendo sus luces y llevando así la atención del usuario a la posición de su vehículo. Dicho modo de señalización se asemeja a 20 la ruta de emergencia marcada en el suelo de los aviones hacia las salidas más cercanas.
En dicho documento se habla por tanto de generar una red de vehículos, en la que el usuario envía una señal con la identificación de su vehículo; ésta viaja a través de todos los vehículos de la red. Cada salto de un vehículo a otro es un paso, y cada paso queda 25 registrado. Cada vehículo de la red envía una señal que contiene el tiempo en que ha recibido la señal y los pasos anteriores. Cuando la señal llega al vehículo objetivo, evalúa el camino más corto y enciende las luces de todos los vehículos que conforman ese camino más corto. Se generan pues saltos infinitos de información, además de un guiado molesto e indiscreto del usuario hacia su propio vehículo. 30
Así pues, se ve que existe aún una necesidad de un procedimiento de detección de la posición de un vehículo estacionado, de modo que un usuario sea capaz de encontrar su vehículo en una zona sin cobertura GPS, habilitando que un usuario que ha aparcado el vehículo en una zona sin cobertura, pueda ser guiado hasta su vehículo con el fin de poder encontrarlo.
DESCRIPCIÓN DE LA INVENCIÓN 5
De acuerdo con la presente invención, este cometido se soluciona mediante un procedimiento de detección de la posición de un vehículo estacionado según la reivindicación 1. Ventajas adicionales de la invención se presentan acompañando las características incluidas en las reivindicaciones dependientes, mencionadas en la 10 descripción que se reseña a continuación.
La idea de la presente invención se centra en crear una red entre vehículos aparcados en una zona de no cobertura por GPS ni redes de telefonía móvil (por ejemplo en parkings subterráneos) , con el fin de obtener un localizador de vehículo, y facilitando así que un 15 usuario sea capaz de encontrar su vehículo posteriormente.
Las tecnologías utilizadas en la idea son:
- Comunicación Car2car: cada vehículo dispone de un emisor y receptor de señales tipo car2car, 20
- Triangulación entre vehículos con el fin de saber su posición relativa, - Triangulación entre el teléfono inteligente y los vehículos para posicionar el teléfono inteligente con respecto a los vehículos.
El sistema envía señales de radiofrecuencia con algún protocolo Bluetooth, Bluetooth Low 25 Energy, WiFi, WiFiDirect Las ondas de Bluetooth o Wifi a veces inducen errores debido a que la señal emitida no llega siempre directamente al receptor (por ejemplo al rebotar en columnas de un parking, paredes) . Así, cuantos más vehículos estén dentro de la red de vehículos interconectados, mejor va a ser la precisión del mapa. Si la red está formada por muchos vehículos, en caso de detectar una señal errónea, es más factible suprimirla 30 haciendo caso del resto de información redundante. De igual modo, la red se va actualizando con nuevos vehículos estacionados, además de eliminar los vehículos que han abandonado la red.
Hay que tener en cuenta, no obstante, que no se desea de una localización exacta, sino que el usuario busca una orientación aproximada hacia la que empezar a andar para encontrar su vehículo.
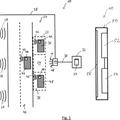
Así pues, y más concretamente, la presente invención consiste en un procedimiento de 5 detección de una posición de un primer vehículo estacionado, vinculado con un dispositivo electrónico móvil, en donde dicho dispositivo electrónico móvil comprende una unidad de procesamiento, una primera memoria y un primer transceptor de señales inalámbricas, en donde el primer vehículo y el dispositivo electrónico móvil intercambian información con unos vehículos periféricos estacionados en un entorno al primer vehículo, en donde dichos 10 vehículos periféricos y dicho primer vehículo comprenden una unidad de control, una segunda memoria y un segundo transceptor de señales inalámbricas, que comprende las etapas de:
a. establecer comunicación entre la unidad de procesamiento del dispositivo electrónico móvil y las unidades de control de al menos tres vehículos estacionados, 15
b. generar una base de datos con unas identificaciones de cada vehículo y unas distancias del dispositivo electrónico móvil respecto a estos al menos tres vehículos estacionados por medio de la unidad de procesamiento, c. recibir en el dispositivo electrónico móvil una tabla de posición que comprende unas identificaciones de cada vehículo y unas distancias entre los vehículos estacionados, 20
d. establecer en el dispositivo electrónico móvil un mapa mediante un proceso de triangulación, en base a la tabla de posición y a la base de datos (alguno de los vehículos puede estar fuera del campo de alcance del dispositivo móvil)
e. eliminar unas ambigüedades en el mapa, y f. emitir a través del dispositivo electrónico móvil indicaciones para facilitar que el 25 dispositivo electrónico móvil alcance la posición del primer vehículo.
Por tanto, y mediante dicho procedimiento, el usuario portador del dispositivo electrónico móvil es orientado hacia su vehículo estacionado, ahorrándole la necesidad de memorizar la posición en la que lo dejó aparcado. Precisar que las indicaciones del dispositivo electrónico móvil pueden ser indicaciones concretas, como gire a la derecha o siga una dirección 30 concreta,...
Reivindicaciones:
1. Procedimiento de detección de una posición de un primer vehículo (2) estacionado, vinculado con un dispositivo electrónico móvil (1) , en donde dicho dispositivo electrónico 5 móvil (1) comprende una unidad de procesamiento (11) , una primera memoria (12) y un primer transceptor de señales inalámbricas (13) , en donde el primer vehículo (2) y el dispositivo electrónico móvil (1) intercambian información con unos vehículos periféricos (3) estacionados en un entorno al primer vehículo (2) , en donde dichos vehículos periféricos (3) y dicho primer vehículo (2) comprenden una unidad de control (21) , una segunda memoria 10 (22) y un segundo transceptor de señales inalámbricas (23) , que comprende las etapas de:
a. establecer comunicación entre la unidad de procesamiento (11) del dispositivo electrónico móvil (1) y las unidades de control (21) de al menos tres vehículos (2, 3) estacionados, b. generar una base de datos (5) con unas identificaciones de cada vehículo y unas 15 distancias del dispositivo electrónico móvil (1) respecto a estos al menos tres vehículos (2, 3) estacionados por medio de la unidad de procesamiento (11) , c. recibir en el dispositivo electrónico móvil (1) una tabla de posición (4) que comprende unas identificaciones de cada vehículo y unas distancias entre los vehículos (2, 3) estacionados, 20
d. establecer en el dispositivo electrónico móvil (1) un mapa (6) mediante un proceso de triangulación, en base a la tabla de posición (4) y a la base de datos (5) , e. eliminar unas ambigüedades en el mapa (6) , y f. emitir a través del dispositivo electrónico móvil (1) indicaciones para facilitar que el dispositivo electrónico móvil alcance la posición del primer vehículo (2) . 25
2. Procedimiento de detección de la posición de un primer vehículo (2) estacionado según la reivindicación 1, caracterizado porque las etapas b. y f. se repiten iterativamente hasta que el dispositivo electrónico móvil (1) alcanza la posición del primer vehículo (2) estacionado emparejado con dicho dispositivo electrónico móvil (1) . 30
3. Procedimiento de detección de la posición de un primer vehículo (2) estacionado según la reivindicación 1, caracterizado porque la etapa de establecer comunicación entre la unidad de procesamiento (11) del dispositivo electrónico móvil (1) y las unidades de control (21) de al menos tres vehículos (2, 3) estacionados comprende las etapas de: 35
a. enviar una señal genérica a través del primer transceptor de señales inalámbricas (13) del dispositivo electrónico móvil (1) , b. recibir una señal concreta de cada uno de los vehículos (2, 3) estacionados, donde dicha señal concreta es emitida por el segundo transceptor de señales inalámbricas (23) de cada uno de los vehículos, 5
4. Procedimiento de detección de la posición de un primer vehículo (2) estacionado según la reivindicación 1, caracterizado porque la etapa de generar una base de datos (5) con unas identificaciones de cada vehículo y unas distancias del dispositivo electrónico móvil (1) respecto a estos al menos tres vehículos (2, 3) estacionados por medio de la unidad de 10 procesamiento (11) , comprende las etapas de:
a. determinar un tiempo comprendido entre la emisión de la señal genérica a través del primer transceptor de señales inalámbricas (13) del dispositivo electrónico móvil (1) y la recepción de la señal concreta de cada uno de los vehículos (2, 3) estacionados, b. determinar una distancia entre el dispositivo electrónico móvil (1) a cada uno de los 15 vehículos (2, 3) estacionados, c. actualizar la primera memoria (12) del dispositivo electrónico móvil (1) con las distancias del dispositivo electrónico móvil (1) con cada uno de los vehículos (2, 3) estacionados.
5. Procedimiento de detección de la posición de un primer vehículo (2) estacionado según la reivindicación 1, caracterizado porque la etapa de eliminar las ambigüedades en el mapa (6) comprende las etapas de:
a. determinar una variación en una dirección de movimiento del dispositivo electrónico móvil (1) a través de un acelerómetro (14) y/o magnetómetro (15) , 25
b. determinar unas nuevas distancias del dispositivo electrónico móvil (1) con al menos dos vehículos (2, 3) estacionados,
c. comparar las nuevas distancias del dispositivo electrónico móvil (1) con al menos dos vehículos (2, 3) estacionados con la distancia entre el dispositivo electrónico móvil (1) a cada uno de los vehículos (2, 3) estacionados, almacenadas en la primera memoria (12) . 30
d. eliminar al menos una alternativa de mapa (6) .
6. Procedimiento de detección de la posición de un primer vehículo (2) estacionado según la reivindicación 1, caracterizado porque una generación de la tabla de posición (4) que comprende las identificaciones de cada vehículo y las distancias entre los vehículos (2, 3) estacionados comprende las etapas de:
a. enviar una señal genérica a través del segundo transceptor de señales inalámbricas (23) del primer vehículo (2) estacionado, b. recibir una señal concreta de cada uno de los vehículos periféricos (3) estacionados, 5 donde dicha señal concreta es emitida por el segundo transceptor de señales inalámbricas (23) de cada uno de dichos vehículos periféricos (3) estacionados, c. determinar un tiempo comprendido entre la emisión de la señal genérica y la recepción de la señal concreta de cada uno de los vehículos periféricos (3) estacionados, d. determinar una distancia del primer vehículo (2) estacionado a cada uno de los 10 vehículos periféricos (3) estacionados, e. recibir una información de las distancias entre los vehículos periféricos (3) estacionados, f. procesar en la unidad de control (21) la información recibida de distancias entre los vehículos periféricos (3) y la distancia del primer vehículo (2) estacionado a cada uno de 15 dichos vehículos periféricos (3) ,
g. actualizar la segunda memoria (22) del primer vehículo (2) estacionado con la información procesada, y h. generar dicha tabla de posición (4) .
7. Procedimiento de detección de la posición de un primer vehículo (2) estacionado según la reivindicación 6, caracterizado porque la segunda memoria (22) del primer vehículo (2) estacionado se actualiza ante un cambio de posición de un vehículo periférico (3) del entorno.
8. Procedimiento de detección de la posición de un primer vehículo (2) estacionado según la reivindicación 6, caracterizado porque la generación de la tabla de posición (4) con distancias entre el primer vehículo (2) y los vehículos periféricos (3) estacionados comprende una etapa adicional de control del movimiento anterior del primer vehículo (2) en su acceso a una posición de estacionamiento (41) , que comprende las etapas de: 30
a. determinar una variación en una dirección de movimiento del primer vehículo (2) a través de un cambio en el giro del volante de dicho primer vehículo (2) , b. actualizar la segunda memoria (22) del primer vehículo (2) con unas nuevas distancias entre el primer vehículo (2) y al menos dos vehículos periféricos (3) estacionados,
c. comparar las nuevas distancias entre el primer vehículo (2) y al menos dos vehículos periféricos (3) estacionados con la distancia del primer vehículo (2) estacionado a cada uno de los vehículos periféricos (3) estacionados almacenadas en la segunda memoria (22) .
d. eliminar al menos una alternativa de posición del primer vehículo (2) respecto a los vehículos periféricos (3) estacionados, y 5
e. generar dicha tabla de posición (4) sin ambigüedades.
9. Procedimiento de detección de la posición de un primer vehículo (2) estacionado según la reivindicación 1, caracterizado porque cada primer vehículo (2) estacionado asigna un vehículo contacto de entre los vehículos periféricos (3) estacionados, preferentemente dicho 10 vehículo contacto es un vehículo más próximo al primer vehículo (2) estacionado.
10. Procedimiento de detección de la posición de un primer vehículo (2) estacionado según las reivindicaciones 1, 6 ó 9, caracterizado porque el vehículo contacto envía a su correspondiente primer vehículo (2) la información de las distancias entre los vehículos 15 periféricos (3) estacionados y/o la tabla de posición (4) que comprende las distancias entre los vehículos periféricos (3) estacionados.
Patentes similares o relacionadas:
Sistema y dispositivo de señales para la entrada y salida de vehículos de un aparcamiento, del 17 de Diciembre de 2019, de RODRIGUEZ BARROS, ALEJANDRO: Sistema de señales para la entrada y salida de vehículos de un aparcamiento, comprende dispositivos activos asociados a unos elementos pasivos (P1), (BL2), (RU) y a un […]
 Procedimiento para registrar vehículos estacionados y para calcular tasas de estacionamiento, del 18 de Septiembre de 2019, de Cleverciti Systems GmbH: Procedimiento para registrar vehículos estacionados y para calcular tasas de estacionamiento, en donde
- se detectan y/o se fijan zonas de estacionamiento […]
Procedimiento para registrar vehículos estacionados y para calcular tasas de estacionamiento, del 18 de Septiembre de 2019, de Cleverciti Systems GmbH: Procedimiento para registrar vehículos estacionados y para calcular tasas de estacionamiento, en donde
- se detectan y/o se fijan zonas de estacionamiento […]
Provisión de servicios municipales usando dispositivos móviles y una red de sensores, del 11 de Septiembre de 2019, de Stationnement Urbain Developpements et Etudes: Un dispositivo móvil que comprende: un procesador , una memoria acoplada al procesador, un visualizador , un mecanismo de entrada […]
SISTEMA PARA DETECTAR VEHÍCULOS EN UN ÁREA, del 6 de Agosto de 2019, de CENVAL, S.L: Sistema para detectar vehículos en un área. Un sistema para detectar vehículos en un área , instalable en un poste fuera del área con un sensor de […]
Sistema de control de estacionamientos autónomo en zona viaria al aire libre., del 7 de Mayo de 2019, de ABRANTE VEGA, Israel: El sistema de control de estacionamientos al aire libre, constituye una ayuda a los diferentes usuarios de aparcamientos tanto en vías públicas como en […]
Procedimiento para la puesta a disposición de un vehículo definida por el usuario, del 10 de Abril de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para la puesta a disposición definida por el usuario de un vehículo en el que el vehículo identifica autónomamente, a partir de un […]
Sistema de gestión de aparcamiento, del 30 de Enero de 2019, de ONE SITU: Un método para monitorear un espacio de aparcamiento por un parquímetro , comprendiendo el método: determinar y comunicar, mediante el parquímetro […]
Sistema y procedimiento para la detección de la ocupación en aparcamientos, del 11 de Septiembre de 2018, de UNIVERSIDAD DE ALCALA.: Sistema y procedimiento para la detección del estado de ocupación de las plazas de aparcamiento (PAs) definidas. El sistema comprende: cámara de vídeo , […]