Dispositivo de rehabilitación de mano en garra y procedimiento de utilización del mismo.
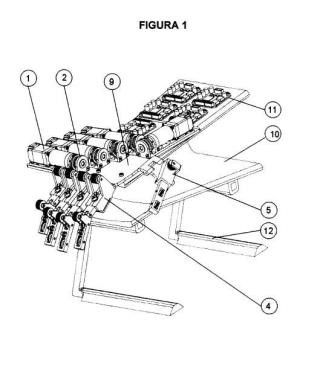
Dispositivo de rehabilitación de la mano, que comprende una férula rígida (10) sobre la que va atornillada una placa soporte (9) en la que están fijados los motorreductores (1),
los mecanismos extensores de dedos largos (4) y del pulgar (5) y las tarjetas controladoras (11) de los motorreductores. Los motorreductores accionan unas poleas motrices (2) que traccionan mediante hilos de compuesto sintético, los mecanismos extensores de los dedos (4) y (5) de forma programada, mediante las tarjetas controladoras (11). El dispositivo de rehabilitación se apoya sobre una mesa mediante dos patas extraíbles (12).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201300328.
Solicitante: UNIVERSIDAD DE BURGOS.
Nacionalidad solicitante: España.
Inventor/es: RUIZ CALVO,JUSTO, MARTINEZ MARTINEZ,ALBERTO, MARTIN FRAILE,JUAN VICENTE, PRECIADO CALZADA,Mónica, BARRIOCANAL IZQUIERDO,Mario, RUIZ DIEZ,David.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61F2/42 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61F FILTROS IMPLANTABLES EN LOS VASOS SANGUINEOS; PROTESIS; DISPOSITIVOS QUE MANTIENEN LA LUZ O QUE EVITAN EL COLAPSO DE ESTRUCTURAS TUBULARES, p. ej. STENTS; DISPOSITIVOS DE ORTOPEDIA, CURA O PARA LA CONTRACEPCION; FOMENTACION; TRATAMIENTO O PROTECCION DE OJOS Y OIDOS; VENDAJES, APOSITOS O COMPRESAS ABSORBENTES; BOTIQUINES DE PRIMEROS AUXILIOS (prótesis dentales A61C). › A61F 2/00 Filtros implantables en los vasos sanguíneos; Prótesis, es decir, elementos de sustitución o de reemplazo para partes del cuerpo; Dispositivos para unirlas al cuerpo; Dispositivos para proporcionar permeabilidad o para evitar que colapsen las estructuras tubulares del cuerpo, p. ej. stents (como artículos cosméticos, ver las subclases apropiadas, p. ej. pelucas o postizos, A41G 3/00, A41G 5/00, uñas artificiales A45D 31/00; prótesis dentales A61C 13/00; materiales para prótesis A61L 27/00; riñones artificiales A61M 1/14; corazones artificiales A61M 60/00). › para las muñecas o los tobillos; para las manos, p. ej. para los dedos; para los pies, p. ej. para los dedos de los pies.
- A63B23/16 A […] › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63B MATERIAL PARA LA EDUCACION FISICA, GIMNASIA, NATACION, ESCALADA O ESGRIMA; JUEGOS DE PELOTA; MATERIAL DE ENTRENAMIENTO (aparatos para gimnasia pasiva, masaje A61H). › A63B 23/00 Aparatos de ejercicio especialmente adaptados a partes determinadas del cuerpo (A63B 22/00 tiene prioridad; aspectos de resistencia A63B 21/00; controles eléctricos o electrónicos de los mismos A63B 24/00; dispositivos para ejercitar o fortificar los dedos o los brazos para la enseñanza de la manipulación de teclados G09B, p. ej. G09B 15/06). › para las manos o los dedos.
Fragmento de la descripción:
OBJETO DE LA INVENCIÓN.
La presente invención se refiere a un dispositivo que sirve de ayuda al fisioterapeuta en el proceso de rehabilitación de las personas que adolecen de la patología denominada mano en garra. El dispositivo diseñado permite un mejor control del esfuerzo realizado sobre los tendones de cada articulación de la mano de cada paciente, así como de las cargas y magnitudes alcanzadas en cada sesión de rehabilitación. El dispositivo realiza de forma repetitiva el número de ciclos a la tensión estipulada por el terapeuta, en cada uno de los dedos de la mano a rehabilitar. Con este dispositivo no es necesario que el terapeuta realice con sus propias manos el estiramiento de los dedos del paciente, por lo que se limita a programar la actuación del dispositivo, pudiendo por tanto estar en el proceso de rehabilitación de varios pacientes de forma simultánea.
PROBLEMA TÉCNICO A RESOLVER Y ANTECEDENTES DE LA INVENCIÓN.
En el presente estado de la técnica, los dispositivos destinados a la rehabilitación de mano en garra no son capaces de rehabilitar de forma autónoma, previa programación, los dedos de la mano dañada, ni existe en la actualidad ningún dispositivo motorizado para realizar tal función. Los dispositivos actuales consisten en férulas inmovilizadoras que mantienen a uno, dos, o más dedos en una ligera extensión constante, durante varias horas al día.
Tal esfuerzo al que se ven sometidas las falanges, bien sea de un dedo o del conjunto de todos los dedos de la mano, se consigue normalmente a base de la tracción producida por gomas elásticas o por muelles que mantienen en estado de tensión constante a los dedos a rehabilitar.
El proceso de rehabilitación con estos sistemas actuales no se acerca a lo que debe ser una rehabilitación pasiva adecuada, que consiste, fundamentalmente en realizar repeticiones sucesivas, manteniendo el estiramiento durante un breve periodo de
tiempo. Por tal motivo el tratamiento de rehabilitación, en la actualidad, lo realiza el terapeuta con sus propias manos durante sesiones de tiempo prefijadas.
Los dispositivos existentes en la actualidad sólo se pueden considerar un complemento al tratamiento realizado por el fisioterapeuta.
El dispositivo aquí presentado es autónomo y se encarga de reproducir y repetir mediante motores eléctricos, el ciclo de esfuerzos introducido por el fisioterapeuta en el equipo de control, para cada uno de los dedos de la mano de forma independiente. El terapeuta no realiza esfuerzo muscular alguno para rehabilitar al paciente, sino que programa los ejercicios que el dispositivo va a realizar durante cada sesión de tratamiento de rehabilitación.
DESCRIPCIÓN DE LA INVENCIÓN
La presente invención describe un dispositivo para la rehabilitación de pacientes con la patología de mano en garra y que consta de una férula rígida de polímero termoestable (10) donde el paciente debe introducir el antebrazo y la mano que debe ser rehabilitada.
Para una mayor comodidad en el apoyo del brazo a la forma del dispositivo de rehabilitación, se interpondrá, entre el antebrazo y la férula rígida, una almohadilla (15) de silícona caliente que adquirirá la forma del brazo y su ajuste a la férula (10). Una vez la silicona se ha enfriado, esta adquiere rigidez y deja fijada de forma cómoda el brazo y muñeca del paciente, pero permitiendo la movilidad de los dedos incluido el pulgar.
El soporte de la férula está diseñado para ser apoyado sobre una mesa cuando el paciente sentado sobre una silla, está haciendo la sesión de rehabilitación.
El dispositivo dispone de cinco motoreductores (1), eléctricos paso a paso programables, y que pueden ser de otro tipo de control distinto al paso a paso, en cuyos ejes se sitúan unas poleas motrices con cuatro acanaladuras cada una, excepto la correspondiente al motor del dedo pulgar que tiene tres acanaladuras.
Cada acanaladura de la polea motriz se corresponde con un hilo tensor del cual tira la polea.
En la parte dorsal de la palma de la mano y atornillada a la férula por el exterior se encuentra una placa soporte (9) rígida metálica donde se ubican los cinco motorreductores correspondientes uno a cada dedo. A esta placa rígida están unidos cinco mecanismos articulados a modo de dedos artificiales que se ubican justamente por encima del dedo correspondiente al que el mecanismo tensiona y que denominaremos
mecanismos extensores (4) correspondientes a los dedos largos y (5) el correspondiente al dedo pulgar.Tales mecanismos a modo de dedos artificiales, disponen de dos falanges metálicas unidas entre sí por una articulación de giro y entre la falange y la placa rígida mediante otra articulación de giro. Además la primera falange artificial que se une a la placa rígida tiene posibilidad de alargamiento longitudinal mediante movimiento telescópico o de corredera, para acomodarse a la antropometría y movimiento natural de las articulaciones de los dedos del paciente. La acanaladura de mayor radio se corresponde con el hilo que tracciona la falange distal del dedo, la cual está unida al hilo mediante una abrazadera con cinta adhesiva (14) tipo velero. La segunda acanaladura se corresponde con el hilo que tracciona la falange media del dedo de idéntica forma al anterior. La tercera acanaladura tira del hilo que extiende la falange distal metálica del mecanismo extensor del dedo. La acanaladura de menor diámetro se corresponde con el hilo que tira de la falange proximal metálica del mecanismo extensor. Esta falange metálica está unida directamente a la falange proximal del dedo mediante abrazadera de cinta adhesiva (14) tipo velero.
Cada motorreductor está gobernado por su propia tarjeta controladora (11) en función del esfuerzo torsor programado por el terapeuta. El desplazamiento de cada hilo es proporcional al diámetro de su acanaladura en la polea motriz (2), de forma tal que el desplazamiento mayor, se corresponde con el movimiento de la falange distal de cada dedo, y la limitación en el par del eje motriz se corresponde con la suma de los pares resistentes producidos por los distintos hilos en la polea motriz (2). Cuando el par torsor producido por el motor alcanza el valor programado, este motor, gobernado por la placa controladora, deja de incrementar la tracción sobre el hilo, manteniendo esa tensión durante el tiempo programado por el terapeuta. Finalizado este periodo, el motor deja de fraccionar quedando ahora el dedo libre que volverá a recuperar la posición inicial arrastrando tras él al mecanismo extensor y el destensado de la polea motriz (2)
Transcurrido de nuevo un tiempo programado sin tensión, el motor vuelve a repetir el ciclo, tirando del mecanismo extensor hasta el par máximo prefijado.
El dispositivo de rehabilitación lleva incorporado la electrónica de programación y pantalla de visualización de datos. Los datos de programación y control de la rehabilitación también pueden ser registrados o impresos en el propio dispositivo o enviados a otro dispositivo externo, como se indica en la descrición de la realización preferente.
El dispositivo de rehabilitación tiene conexión a la red eléctrica monofásica de 220- 240 voltios de C.A.
El procedimiento de utilización del dispositivo de rehabilitación de la mano, comprende las siguientes etapas para su utilización:
a.- Conexión de la clavija del cable eléctrico del dispositivo a un enchufe monofásico de la red eléctrica C.A. de 220-240 voltios.
b.- lntroducción del antebrazo con la mano a rehabilitar junto con la almohadilla de silicona caliente (15) en la férula termoestable (10), como se aprecia en la figura 10;
c.- amarre con las cintas abrazaderas (14) de cada dedo del mecanismo extensor (4) y (5) a las falanges correspondientes de cada dedo de la mano y ajuste mediante el cierre tipo velero de las propias cintas abrazaderas (14);
d.- activación del interruptor que conecta la alimentación eléctrica del dispositivo.
e.- ejecución del programa de control seleccionado para dicho paciente, una vez que la almohadilla de silicona (15) se ha enfriado y rigidizado con la forma anatómica del antebrazo del paciente.
f.- Desactivación del interruptor de la conexión eléctrica una vez terminado el programa, y desamarre de todos los cierres tipo velero de las abrazaderas (14) de todas las falanges de los dedos, para retirar el antebrazo y mano de la férula y concluir la sesión de rehabilitación del paciente.
BREVE DESCRIPCIÓN DE LAS FIGURAS
Para completar la invención que se está describiendo y con objeto de ayudar a una mejor comprensión de las características de la invención, de acuerdo con un ejemplo preferente de realización de la...
Reivindicaciones:
1.- Dispositivo de rehabilitación de mano en garra que comprende:
-Una férula (10) en la que se introduce el antebrazo y mano del paciente
-Una placa soporte (9) sobre la que se atornillan los mecanismos de que consta el dispositivo de rehabilitación
- Cinco motorreductores eléctricos (1 )
- Cuatro mecanismos extensores (4) para rehabilitación de los dedos largos.
- Un mecanismo extensor (5) para la rehabilitación del dedo pulgar.
- Cinco tarjetas programables (11), una por cada motorreductor.
- Conexión a la red eléctrica monofásica de 220-240 voltios de C.A.
caracterizado porque la férula (10) es rígida de material termoestable, y sobre la cual va atornillada una placa soporte (9) metálica en la que se apoyan los mecanismos que se citan:
- Los motorreductores (1) que accionan sus poleas motrices (2)
- Los mecanismos extensores de los dedos (4) y (5)
- Las tarjetas controladoras de los motorreductores (11)
- La conexión a la red eléctrica doméstica.
2.- Dispositivo de rehabilitación de mano en garra, acorde a las reivindicación 1, caracterizado porque los motorreductures eléctricos (1) pueden ser de otro tipo de control distinto al paso a paso.
3.- Dispositivo de rehabilitación de mano en garra, según reivindicaciones anteriores caracterizado porque el propio dispositivo lleva incorporado la electrónica de programación y pantalla de visualización de datos
4.- Dispositivo de rehabilitación de mano en garra según reivindicaciones anteriores caracterizado porque los datos de programación y control de la rehabilitación pueden ser registrados o impresos en el propio dispositivo o enviados a otro dispositivo extemo.
5.- Procedimiento de utilización de un dispositivo de rehabilitación de mano en garra según reivindicaciones anteriores caracterizado por comprender las siguientes etapas para su utilización:
a.- Conexión de la clavija del cable eléctrico del dispositivo a un enchufe monofásico de la red eléctrica C.A. de 220-240 voltios
b.- lntroducción del antebrazo con la mano a rehabilitar junto con la almohadilla de silicona 5 caliente (15) en la férula termoestable (10)
c.- amarre con las cintas abrazaderas (14) de cada dedo del mecanismo extensor (4) y (5) a las falanges correspondientes de cada dedo de la mano y ajuste mediante el cierre tipo velero de las propias cintas abrazaderas (14)
d.- activación del interruptor que conecta la alimentación eléctrica del dispositivo.
e.-ejecución del programa de control seleccionado para dicho paciente, una vez que la almohadilla de silicona (15) se ha enfriado y rigidizado con la forma anatómica del antebrazo del paciente
f.- Desactivación del interruptor de la conexión eléctrica una vez terminado el programa, y desamarre de todos los cierres tipo velero de las abrazaderas (14) de todas las falanges 15 de los dedos, para retirar el antebrazo y mano de la férula y concluir la sesión de rehabilitación del paciente
Patentes similares o relacionadas:
Implante de articulación subastragalina, del 15 de Julio de 2020, de Paragon 28, Inc: Un implante de articulación subastragalina para reemplazar una articulación subastragalina natural existente entre los huesos astrágalo y calcáneo de […]
Prótesis que incluye disposición de bola y cavidad, del 13 de Mayo de 2020, de APTIS MEDICAL, LLC: Una prótesis para sustituir una articulación de mamífero, que comprende: un primer cuerpo , que incluye una bola montada en un eje; un segundo cuerpo , […]
Aparato para alinear una copa acetabular, del 29 de Abril de 2020, de DePuy Ireland Unlimited Company: Una copa acetabular que comprende: una cubierta sustancialmente hemisférica que tiene un borde , en donde un eje de copa de la copa acetabular pasa a través […]
Prótesis de tobillo mejorada, del 15 de Abril de 2020, de In2Bones: Prótesis de tobillo, que comprende un componente astragalino que comprende una cara superior astragalina que define una primera superficie […]
Prótesis del escafoides, del 19 de Febrero de 2020, de Medartis Holding AG: Una prótesis del escafoides que comprende un cuerpo delimitado por una superficie externa , en donde la superficie externa […]
Implante de artrodesis e instrumento de sujeción de tal implante, del 7 de Agosto de 2019, de In2Bones: Un implante de artrodesis que permite promover la fusión ósea de un primer hueso con un segundo hueso , comprendiendo dicho implante : - un cuerpo […]
Unión protésica articular con caña de expansión, del 3 de Julio de 2019, de Zrinski GmbH: Prótesis parcial articular, especialmente para una articulación de dedo, que está constituida o bien por un componente próximo o distal así como por una caña […]
Sistemas para la fijación o la fusión de huesos usando implantes compresivos, del 22 de Abril de 2019, de SI-Bone, Inc: Un conjunto para la fijación o la fusión de estructuras óseas, que comprende primeros y segundos segmentos de huesos separados por una línea de fractura o de articulación, […]