MÉTODO PARA LA DETERMINACIÓN DE LA CORRECCIÓN DE ERRORES DE SEGUIMIENTO DE LA PLATAFORMA DE UN SEGUIDOR SOLAR, UNIDAD CENTRAL DE PROCESO ADAPTADA PARA LLEVAR A CABO DICHO MÉTODO Y SEGUIDOR SOLAR QUE COMPRENDE DICHA UNIDAD CENTRAL DE PROCESO.
Método para la determinación de la corrección de errores de seguimiento de la plataforma de un seguidor solar,
unidad central de proceso adaptada para llevar a cabo dicho método y seguidor solar que comprende dicha unidad central de proceso.
La presente invención está dirigida a un método para la determinación de la corrección de la plataforma de un seguidor solar que permite compensar principalmente la desviación en acimut y la inclinación del seguidor. Según modos de realización de este método es posible igualmente llevar a cabo una corrección adicional en elevación. La invención, según diversos modos de realización, dispone de una unidad central de proceso que actúa sobre unos medios de impulsión dando órdenes que tienen en cuenta las correcciones calculadas para generar las consignas oportunas a los medios de impulsión consiguiendo una correcta dirección de apunte de la plataforma.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201232030.
Solicitante: ABENGOA SOLAR NEW TECHNOLOGIES, S.A.
Nacionalidad solicitante: España.
Inventor/es: Noriega Gil,Pablo, PÉREZ GARCÍA DE CASTRO,JOSÉ ANTONIO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F24J2/40
Fragmento de la descripción:
Método para la determinación de la corrección de errores de seguimiento de la plataforma de un seguidor solar, unidad central de proceso adaptada para llevar a cabo dicho método y seguidor solar que comprende dicha unidad central de proceso.
OBJETO DE LA INVENCIÓN
La presente invención está dirigida a un método para la determinación de la corrección de la plataforma de un seguidor solar que permite compensar principalmente la desviación en acimut y la inclinación del seguidor. Según modos de realización de este método es posible igualmente llevar a cabo una corrección adicional en elevación.
La invención, según diversos modos de realización, dispone de una unidad central de proceso que actúa sobre unos medios de impulsión dando órdenes que tienen en cuenta las correcciones calculadas para generar las consignas oportunas a los medios de impulsión consiguiendo una correcta dirección de apunte de la plataforma.
ANTECEDENTES DE LA INVENCIÓN
En el estado de la técnica existen diferentes estrategias de control cuyo objetivo es garantizar una correcta orientación del seguidor solar en todo momento.
Un ejemplo de este tipo de estrategias está basado en un control en lazo cerrado. Este sistema basa su funcionamiento en la realimentación del error de apunte en cada instante, normalmente mediante el uso de un dispositivo auxiliar. La medida de dicho dispositivo es interpretada y utilizada por unos medios de control que a su vez actúan sobre unos medios de impulsión de la plataforma del seguidor solar para que dicha plataforma mantenga una correcta orientación.
Un ejemplo de dispositivo auxiliar consiste en un sensor de apunte que hace uso de una pluralidad de áreas sensibles a la radiación solar situadas sobre un plano y distribuidas en torno a un punto; y, un elemento opaco situado sobre dicho punto, distanciado del plano, destinado a arrojar sombra sobre el plano donde están las áreas sensibles. Cuando la orientación del plano donde se encuentran las áreas sensibles a la radiación solar es perpendicular a la radiación, entonces la sombra del elemento que se encuentra sobre este plano arroja la sombra en el punto en torno al cual se distribuyen las áreas sensibles sin que ninguna de ellas vea reducida la lectura de la radiación. Por el contrario, cuando el plano no está orientado perpendicularmente a la dirección de radiación, la sombra cubre algunas de las áreas sensibles. Dependiendo de qué área sensible es la que se encuentra total o parcialmente cubierta es posible determinar el grado de desviación de la orientación del plano de este dispositivo auxiliar.
Las estrategias de control en bucle cerrado basadas en la realimentación mediante dispositivos auxiliares presentan varios inconvenientes. El primero es que la suciedad del dispositivo podría desvirtuar la lectura, ya que pueden generarse sombras que sean interpretadas como desviaciones del dispositivo de orientación. Una partícula no muy grande puede impedir la correcta orientación de un módulo completo de captación de energía solar y éste puede estar instalado en un lugar donde no se acceda fácilmente ni de forma inmediata.
Otro inconveniente que presenta este tipo de estrategias es que los dispositivos auxiliares miden el error en su orientación respecto de la dirección de incidencia de los rayos y no el error
en la orientación del sistema completo. Es por tanto necesario garantizar que el sensor de apunte y el seguidor tengan la misma orientación. Sin embargo, esta orientación de uno respecto del otro no siempre es perfecta, está sujeta a errores de montaje; y, puede verse modificada por problemas por ejemplo de deformación o desalineamiento de los elementos estructurales.
Por otro lado, existen estrategias de control híbridas que basan su funcionamiento en un control en bucle abierto donde, antes de cada movimiento, se realizan una serie de operaciones matemáticas para generar posiciones de referencia corregidas, mediante la aplicación de unos factores de corrección sobre las posiciones teóricas resultantes del cálculo de efemérides solares. Dichos factores de corrección se obtienen mediante la resolución de modelos matemáticos a partir de una o varias calibraciones del seguidor. Dado que dichos modelos son fuertemente no lineales, es necesario utilizar algoritmos avanzados para la resolución de sistemas no lineales mediante métodos iterativos, que en general no garantizan la convergencia e implican un elevado coste computacional, y normalmente requieren un elevado número de calibraciones para conseguir resultados aceptables.
La presente invención es un método que determina la corrección de errores de seguimiento de la plataforma de un seguidor solar debidas a causas tales como deformaciones de la estructura, holguras, errores de montaje y otros. Las desviaciones en elevación y en azimut, que se consideran constantes, son comúnmente conocidas a través del término en inglés "offset] esto es, offset de elevación, offset de azimut. El uso a lo largo de la descripción del término desviación o error deberá interpretarse con el mismo significado que el indicado por el término inglés offset tal y como se utiliza en el ámbito de la técnica de la invención.
El método según la invención permite que, establecidas las posiciones de referencia iniciales a partir del cálculo de efemérides solares, se generen nuevas posiciones de referencia corregidas de modo que la plataforma se oriente de forma adecuada a pesar de las desviaciones anteriormente indicadas. La invención establece un método de determinación de la corrección del error. Una vez establecidas las nuevas posiciones de referencia corregidas, según modos de realización de la invención se dispone de un sistema de control basado en una estrategia de control híbrida en la que para obtener los factores de corrección se prescinde de la resolución de modelos matemáticos no lineales, de forma que con varias calibraciones es posible mejorar de forma sustancial las prestaciones respecto a un control en bucle abierto.
DESCRIPCIÓN DE LA INVENCIÓN
La presente invención es un método de determinación de la corrección de errores de seguimiento de la plataforma de un seguidor solar.
El dispositivo sobre el que se determina la corrección es un seguidor solar que comprende:
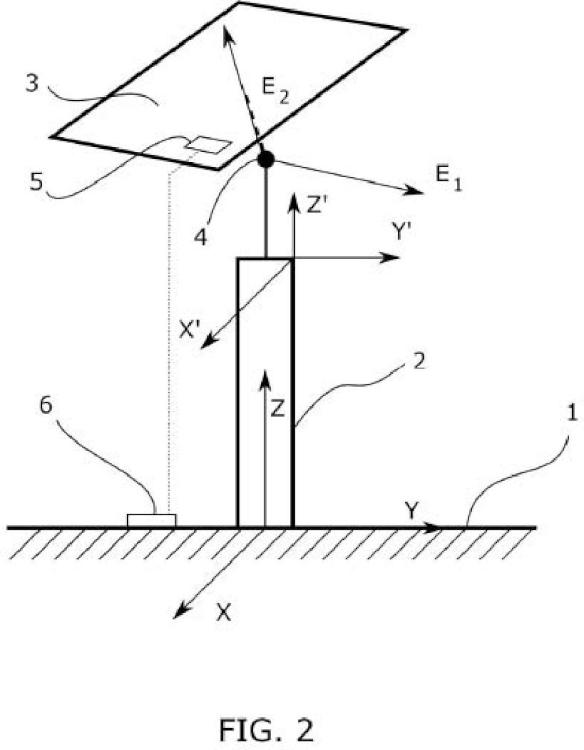
a) un elemento estructural soporte de la plataforma dispuesto sobre una base fija donde esta base fija tiene asociada un primer sistema de coordenadas ortogonal (x,y,z) con la coordenada z preferentemente orientada hacia el cénit.
Se considera una base fija, preferentemente una superficie ideal correspondiente al suelo, que sirve a su vez para establecer el primer sistema de coordenadas, el denominado primer sistema de coordenadas (x,y,zj. Por defecto, los sistemas de coordenadas serán cartesianos y ortonormales. Existen dispositivos que proveen de valores de la orientación por ejemplo en coordenadas esféricas. En estos casos se entiende que mediante un cambio de coordenadas el mismo vector es expresable en el sistema coordenado cartesiano. Lo mismo sucede si el
sistema de coordenadas no es ortonormal, bastará con establecer el cambio de base para que el mismo vector se pueda expresar en el sistema ortonormal (x,y,z). Por comodidad, aunque no es estrictamente necesario para la invención, se adopta un sistema de coordenadas en el que las coordenadas x e y corresponden a ejes paralelos al suelo y la coordenada z orientada hacia el cénit. Igualmente, el ejemplo preferido toma el eje que corresponde a la coordenada x orientado hacia el sur y el eje que corresponde a la coordenada y orientada hacia el este.
b) la plataforma unida al elemento estructural, mediante un vínculo dotado de uno o más grados de libertad y¡,j = 1,2,... según uno o más ejes de giro Ej,j = 1,2,... respecto de dicho elemento estructural para su orientación según una determinada posición angular.
Sobre el suelo se encuentra el elemento estructural y es sobre este elemento estructural sobre el que está instalada la plataforma con capacidad de movimiento. El movimiento se debe a que el elemento estructural y la plataforma están unidos mediante un vínculo dotado de uno o más grados de libertad yj,j = 1,2,... según uno o más ejes de giro E¡,j = 1,2,... respecto de dicho elemento estructural. El vínculo dotado de uno o más grados de libertad no necesariamente es un vínculo puntual sino que puede estar constituido por una cadena cinemática con eslabones consecutivos donde por ejemplo cada uno de ellos aporta un grado de libertad adicional. La plataforma es el elemento móvil y este puede comprender según distintos ejemplos de realización paneles fotovoltaicos o ser un reflector de un heliostato. Un ejemplo...
Reivindicaciones:
1.- Método para la determinación de la corrección de errores de seguimiento de la plataforma (3) de un seguidor solar donde dicho seguidor solar comprende:
a) un elemento estructural (2) soporte de la plataforma (3) dispuesto sobre una base fija (1) donde esta base fija (1) tiene asociada un primer sistema de coordenadas ortogonal (x,y,z) con la coordenada z preferentemente orientada hacia el cénit,
b) la plataforma (3) unida al elemento estructural (2), mediante un vínculo (4) dotado de uno o más grados de libertad y¡,j = 1,2,... según uno o más ejes de giro Ej,j = 1,2,... respecto de dicho elemento estructural (2) para su orientación según una determinada posición angular,
c) dicho elemento estructural (2) tiene asociado un segundo sistema de coordenadas ortogonal (x',y',z') vinculado al elemento estructural (2) en un punto situado antes del vínculo (4) dotado de uno o más grados de libertad, siendo este segundo sistema de coordenadas esencialmente paralelo al primer sistema de coordenadas (x,y,z) salvo desviaciones, entre las que se encuentran de forma no limitativa desviaciones de inclinación, desviaciones de azimut, desviaciones en elevación, desviaciones debidas a holguras, o cualquier combinación de las anteriores, respecto de la base fija (1),
d) unos medios de medida (5) para determinar la orientación p = (px,py,pz) de la plataforma (3) respecto al sol, en particular expresables en el segundo sistema de coordenadas (x'.y'.z'),
e) una unidad de proceso (6) conectada al menos a los medios de medida (5),
donde dicha unidad de proceso (6) está adaptada para ejecutar instrucciones para la determinación de la corrección de errores de seguimiento de la plataforma (3) para al menos corregir desviaciones de inclinación y desviaciones de azimut de acuerdo a las siguientes etapas:
- establecer valores de coordenadas s = (s*, sy, sz) de apunte de la plataforma (3) al sol en el primer sistema de coordenadas (x,y,z),
- proveer de n pares de posiciones, al menos tres, st = {six,siy,siz),i = 1,2,...,n y p¡ = (PixPiyPiz)*- = l2 -n donde son coordenadas cartesianas de efemérides del sol expresadas en el primer sistema de coordenadas (x,y,z) y pf son las coordenadas cartesianas a adoptar por la plataforma (3) en el apunte a dichas efemérides después de una corrección de las desviaciones determinadas o estimadas mediante los medios de medida (5), expresadas sobre el segundo sistema de coordenadas (x',y',z'),
- establecer el sistema de ecuaciones P xR = S, determinado si n = 3 y sobredeterminado si n > 3 donde:
o la matriz P está formada por los vectores pf = (PiX>Piy>Piz)>i = 1,2, - ,n dispuestos por filas,
o la matriz S está formada por los vectores st = {six,siy,siz),i = 1,2,...,n también dispuestos por filas y en el mismo orden que el tomado para los vectores p, o y R es una matriz 3x3;
- resolver el sistema P x R = S en la incógnita R,
- proveer como resultado la matriz R que permite la corrección del vector de apunte de la plataforma (3) según p = (px>Py>Pz) = (sx,Sy,sz) x R-1 para la corrección al menos en inclinación y en azimut respecto de s = (sx,sy,sz).
2.- Método según la reivindicación anterior caracterizado porque para un número de puntos n > 3 el sistema de ecuaciones se resuelve mediante la resolución del sistema P xR = S por un método de minimización donde R es expresado como R = (PT xW x P)-1PT x W x S siendo W una matriz de componentes positivos.
3.- Método según la reivindicación 2 caracterizado porque la matriz W es una matriz con los elementos no diagonales nulos y los elementos de la diagonal estrictamente positivos.
4.- Método según la reivindicación 2 caracterizado porque la matriz W es la matriz identidad de tal modo que R es expresada como R = (PT x P)-1PT x S.
5.- Método según cualquiera de las reivindicaciones 2 a 4 caracterizado porque la minimización del sistema de ecuaciones es mediante el método de mínimos cuadrados.
6.- Método según cualquiera de las reivindicaciones anteriores caracterizado porque del
conjunto de n pares de posiciones s¡ i = 1,2,...,n y p¡ {jPix>Piy>Piz)>i
1,2,...,n, al menos un par de posiciones s¡ = (s7-x,sjy,s;z) y p;- = (PjX>Pjy>PjZ) corresponde a un punto virtual calculado a partir de ecuaciones matemáticas con puntos reales.
7.- Método según la reivindicación 6 caracterizado porque las coordenadas p = (px, py, pz) de apunte de la plataforma (3) en el segundo sistema de coordenadas (x',y',z') se obtienen mediante el siguiente cálculo vectorial sj = sk x sr, y p¡ = pk x pr con k y r distintos de j y distintos entre sí; y ambos correspondientes a un punto ya determinado mediante los medios de medida (5).
8.- Método según la reivindicación 6 caracterizado porque la obtención de puntos virtuales se lleva a cabo generando matrices P' y S' intermedias a partir de tres medidas reales ya existentes; y, mediante el cálculo de la inversa de la traspuesta de una y otra matriz intermedia se obtienen los pares de puntos virtuales:
donde los tres pares i = 1,2,3 son dichos puntos virtuales.
9.- Método según la reivindicación 6 caracterizado porque la obtención de puntos virtuales se lleva a cabo generando matrices P' y S' intermedias a partir de tres o más medidas reales ya existentes; y, los pares de puntos virtuales se obtienen mediante las siguientes expresiones:
donde los tres pares st, pt i = 1,2,3 son dichos puntos virtuales.
10.- Método según cualquiera de las reivindicaciones anteriores caracterizado porque la unidad de proceso (6) lleva a cabo una estimación de la desviación en elevación según las siguientes etapas:
- proveer de un conjunto de valores de la desviación en elevación SELk, k = 1,2,
- para cada valor de la desviación en elevación SELk
o resolver el sistema P'k x R'k= S siendo:
la matriz P'k está formada por los vectores P'ik = {p'ix.P'iy.P'iz)k.í = 1,2,...,n dispuestos por filas donde cada vector p'ik es el vector expresado en el primer sistema de coordenadas (x,y,z) resultado de incrementar el ángulo de elevación del vector la cantidad determinada por la desviación
**(Ver fórmula)** **(Ver fórmula)**SELk,
la matriz S está formada por los vectores st = (six,siy,siz),i = 1,2,...,n también dispuestos por filas y en el mismo orden que el tomado para los vectores p'ik,
y R'k es una matriz 3x3;
o establecida una métrica del error de ortogonalidad de una matriz M, preferentemente e(M) = \\M x MT -I\\, se determina ek = e(R'k),
- dada la función discreta ek = f(8ELk) definida en los puntos SELk,k = 1,2,.. se provee de un valor de desviación de la elevación SEL que la hace mínima y se determina la matriz R como la R que corresponde al cálculo de SEL,
donde para un vector s = (sx,sy,sz) la determinación de la corrección consiste en llevar a cabo primero la suma del valor de la desviación en elevación SEL y luego, para la posterior corrección al menos en inclinación y en azimut, la premultiplicación por la matriz fí-1.
11.- Método según la reivindicación 10 caracterizado porque cada uno de los valores de la desviación en elevación SELk,k = 1,2,.., se toma de uno en uno de tal modo que la elección de valores SELk y el cálculo del sistema P'k xR'k = S se lleva a cabo mediante un sistema iterativo que se aplica hasta que la métrica del error está por debajo de un valor umbral preestablecido.
12.- Método según la reivindicación 10 caracterizado porque el conjunto de valores de la desviación en elevación SELk,k = 1,2,.., pertenece a un rango de variación preestablecido de la desviación en elevación SEL\ [a,b] a partir del cual se establecer un conjunto ordenado de m valores la desviación en elevación SELk k = 1 ,...,m, dentro del rango [a,b] donde para cada uno de los cuales se resuelve el sistema P'k xR'k= S para obtener la función discreta ek = f(SELk) para todo valor de k.
13.- Método según la reivindicación 12 caracterizado porque el valor tomado como mínimo de la función discreta ek = f(8ELk) es el SELk que da lugar al menor de los valores de ek.
14.- Método según la reivindicación 12 caracterizado porque el valor tomado como mínimo de la función discreta ek = f(8ELk) se determina:
- evaluando una función aproximante, preferentemente polinómica, de la función discreta
ek = f(SELk),
- calculando el mínimo de la función aproximante,
donde el mínimo de la función aproximante es el valor de desviación de la elevación SEL y para dicho valor se resuelve el sistema P'k xRk = S para obtener la matriz R asociada a dicho valor.
15.- Método de corrección de un seguidor solar de acuerdo a las características a) a e) de la reivindicación 1 caracterizado porque:
- el seguidor solar adicionalmente comprende unos medios de impulsión adaptados para mover la plataforma (3) en cada uno de los ejes de giro Ej,j = 1,2,....
- los medios de impulsión están actuados por la unidad central de proceso (6) de tal modo que orientan la plataforma (3) según una dirección de apunte establecida por la unidad central de proceso (6),
donde
- la plataforma (3) impulsada por los medios de impulsión que a su vez están actuados por la unidad central de proceso (6) lleva a cabo un seguimiento del sol de acuerdo a una secuencia de efemérides solares de coordenadas s = (sx,sy,sz) según el primer sistema de coordenadas (x,y,z) proveyendo de instrucciones de apunte a los medios de impulsión
de acuerdo a las coordenadas corregidas p = (px,py,pz) = RT x (sx,sy,sz), mediante una /? calculada en una corrección anterior, no necesariamente la inmediatamente anterior, y opcionalmente también la desviación en elevación, según cualquiera de las reivindicaciones anteriores.
16.- Método según las reivindicaciones anteriores caracterizado porque:
- a lo largo del día la unidad de proceso (6) del seguidor solar lleva a cabo al menos una determinación de la corrección del error de seguimiento según cualquiera de las reivindicaciones 1 a 13,
- el movimiento de la plataforma (3) siguiendo el sol se lleva a cabo una o más medidas de la posición de apunte de la plataforma (3) p = (px, py, pz) ante la instrucción de apunte correspondiente a la posición del sol s = (sx,sy,sz) para determinar las coordenadas corregidas que dan lugar a la correcta orientación de la plataforma (3) almacenando los pares de valores py s preferentemente para su uso en calibraciones posteriores.
17.- Unidad de proceso (6) adaptada para llevar a cabo un método de determinación de la corrección automática de errores de seguimiento de acuerdo a cualquiera de las reivindicaciones 1 a 13.
18.- Seguidor solar caracterizado porque comprende:
- un elemento estructural (2) soporte de la plataforma (3) dispuesto sobre una base fija (1),
- una plataforma (3) unida al elemento estructural (2), mediante un vínculo (4) dotado de uno o más grados de libertad yj,j = 1,2,... según uno o más ejes de giro Ej,j = 1,2,... respecto de dicho elemento estructural (2) para su orientación según una determinada posición angular,
- unos medios de medida (5) para determinar la orientación p = (px, py, pz) de la plataforma (3) respecto al sol,
- unos medios de impulsión adaptados para mover la plataforma (3) en cada uno de los ejes de giro Ej,j = 1,2,...,
- una unidad de proceso (6) según la reivindicación anterior conectada al menos a los medios de medida (5) y a los medios de impulsión.
19.- Seguidor solar según la reivindicación 18 caracterizado porque la plataforma (3)
comprende paneles fotovoltaicos.
20.- Seguidor solar según la reivindicación 18 caracterizado porque la plataforma (3)
comprende espejos para la reflexión de los rayos incidentes, y donde medios de medida (5) para determinar la orientación p = (px,py,pz) de la plataforma (3) respecto al sol adoptan como coordenadas del sol las coordenadas tales que la reflexión de la radiación incidente que proviene del sol alcance el receptor solar.
21.- Sistema caracterizado porque comprende una pluralidad de seguidores solares según la reivindicación anterior.
22.- Sistema según la reivindicación anterior caracterizado porque uno o más unidades de proceso (6) están compartidas por dos o más seguidores solares.
23.- Planta solar caracterizado porque comprende un sistema según la reivindicación 21 o 22.
Patentes similares o relacionadas:
Módulo de bomba de circulación e instalación termosolar que lo comprende, del 15 de Marzo de 2017, de Grundfos Holding A/S: Módulo de bomba de circulación con un motor de accionamiento eléctrico y un sistema de control , disponiéndose en el módulo de bomba de circulación […]
Procedimiento para el funcionamiento de una planta solar, del 14 de Septiembre de 2016, de Viessmann Werke GmbH & Co. KG: Procedimiento para el funcionamiento de una planta solar, en el que el calor absorbido por un colector se puede aportar, a través de un circuito solar […]
Colector solar, del 20 de Julio de 2016, de Viessmann Werke GmbH & Co. KG: Colector solar que comprende al menos un tubo de calor con un condensador que está dispuesto entre dos ramales de tubería de un acumulador, presentándose […]
 Captador de flujo térmico, del 30 de Marzo de 2016, de Cockerill Maintenance & Ingéniérie S.A: Intercambiador de calor que comprende una pluralidad de tubos de intercambio montados juntos longitudinalmente con el fin de crear una porción […]
Captador de flujo térmico, del 30 de Marzo de 2016, de Cockerill Maintenance & Ingéniérie S.A: Intercambiador de calor que comprende una pluralidad de tubos de intercambio montados juntos longitudinalmente con el fin de crear una porción […]
 Dispositivo inteligente para absorber energía solar y controlar admisión de luz solar, del 29 de Marzo de 2016, de Tinoco Cavalheiro, José Roberto: Dispositivo inteligente para absorber energía solar y controlar la admisión de luz solar que comprende los siguientes elementos:
a) una estructura externa […]
Dispositivo inteligente para absorber energía solar y controlar admisión de luz solar, del 29 de Marzo de 2016, de Tinoco Cavalheiro, José Roberto: Dispositivo inteligente para absorber energía solar y controlar la admisión de luz solar que comprende los siguientes elementos:
a) una estructura externa […]
 Instalación solar, del 2 de Marzo de 2016, de RITTER ENERGIE- UND UMWELTTECHNIK GMBH & CO. KG: Instalación solar con un colector solar que presenta al menos un tubo de colector con un tubo envolvente en el que engrana un registro […]
Instalación solar, del 2 de Marzo de 2016, de RITTER ENERGIE- UND UMWELTTECHNIK GMBH & CO. KG: Instalación solar con un colector solar que presenta al menos un tubo de colector con un tubo envolvente en el que engrana un registro […]
 Dispositivo térmico con guía de luz, del 11 de Febrero de 2016, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Dispositivo térmico que comprende una parte térmica que comprende una multitud de tubos portadores de calor para el paso de un […]
Dispositivo térmico con guía de luz, del 11 de Febrero de 2016, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Dispositivo térmico que comprende una parte térmica que comprende una multitud de tubos portadores de calor para el paso de un […]
 Módulo receptor para central solar con vigilancia térmica integrada, del 3 de Febrero de 2016, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Módulo receptor (MR) para central solar, incluyendo dicho módulo receptor (MR) una estructura metálica y un módulo absorbedor (MA), definiendo la estructura metálica […]
Módulo receptor para central solar con vigilancia térmica integrada, del 3 de Febrero de 2016, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Módulo receptor (MR) para central solar, incluyendo dicho módulo receptor (MR) una estructura metálica y un módulo absorbedor (MA), definiendo la estructura metálica […]