Procedimiento para el funcionamiento de una dirección asistida eléctrica.
Una arquitectura de ordenador y funcional para el funcionamiento de una dirección asistida eléctrica,
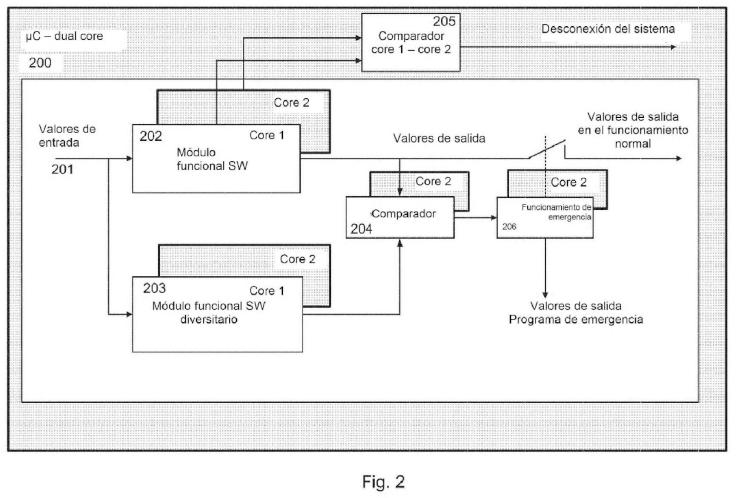
caracterizada por que se ejecutan prácticamente en paralelo una ruta de control (202) y una ruta de vigilancia (203) realizada de modo diversitario respecto a ésta en dos núcleos (core 1, core 2) respectivamente asignados de un microordenador (200) redundante y se detectan las diferencias de cálculo que se producen en la ruta de control (202) o en la ruta de vigilancia (203) a nivel funcional mediante un comparador (204) y se detectan los resultados de las distintas etapas de cálculo a nivel granular mediante un comparador de núcleos (205), pasándose en consecuencia de la diferencia detectada por el comparador (204) a nivel funcional a un funcionamiento de emergencia (206), en caso de que el comparador de núcleos (205) no haya diagnosticado ningún error de cálculo, para garantizar que siga estando disponible al menos una parte de la asistencia a la dirección o de las funciones de dirección, al menos durante un tiempo determinado.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2012/062525.
Solicitante: Robert Bosch Automotive Steering GmbH.
Nacionalidad solicitante: Alemania.
Dirección: RICHARD-BULLINGER-STRASSE 77 73527 SCHWÄBISCH GMÜND ALEMANIA.
Inventor/es: BRENNER, PETER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D5/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 5/00 Dirección asistida o de relé de potencia (para ruedas no orientables B62D 11/00; servomotores de fluido bajo presión en general F15B). › eléctrica, p. ej. utilizando un servomotor eléctrico conectado o que forma parte del mecanismo de dirección.
PDF original: ES-2546530_T3.pdf
Fragmento de la descripción:
Procedimiento para el funcionamiento de una dirección asistida eléctrica La presente invención se refiere a una arquitectura de ordenador y funcional para el funcionamiento de una dirección asistida eléctrica, presentando la unidad de control una arquitectura de ordenador con núcleo redundante, un llamado procesador "dual core".
Estado de la técnica
Al usar un microordenador para el cálculo y la regulación de la asistencia a la dirección en una servodirección eléctrica deben detectarse errores en el núcleo del ordenador y debe desconectarse el sistema en caso de haberse producido un error, puesto que ya no puede garantizarse un cálculo y una regulación seguros. La prueba de un error en el núcleo de ordenador del microordenador se realiza según el estado de la técnica mediante el cálculo doble de la asistencia a la dirección. Los algoritmos de cálculo necesarios para ello están concebidos de modo diversitario. Cuando se distinguen los resultados de una ruta de control (nivel 1) de la ruta de vigilancia diversitaria (nivel 2) , se parte de un error en el núcleo del ordenador. En consecuencia de la diferencia detectada, el sistema debe desconectarse de la forma más rápida posible y hacerse pasar así al estado seguro. No obstante, para el conductor, la desconexión de la asistencia a la dirección va unida a grandes restricciones del confort. Unas magnitudes de salida típicas son una especificación del valor teórico para el momento de asistencia del servomotor, aunque según el alcance de las funciones, también puede estar prevista la salida de magnitudes internas de la dirección, como por ejemplo la información acerca del ángulo de dirección para unidades de control asociadas.
El documento con el número de publicación internacional WO 2010/031520 A1 describe una arquitectura de ordenador y funcional para el funcionamiento de una servodirección eléctrica. Para ello, una unidad de control dispone de un ordenador principal y de un ordenador de vigilancia externo. El ordenador principal calcula a partir de señales de entrada señales de control para un servoaccionamiento y presenta además una unidad de vigilancia interna para la vigilancia de su función de dirección propia. Además, está prevista una unidad de vigilancia externa para la vigilancia de la función del ordenador principal. Tanto el ordenador principal como el ordenador de vigilancia externo tienen acceso a una ruta de desconexión del sistema en conjunto. Cuando se produce un error en el ordenador de vigilancia externo, se bloquea el acceso del ordenador de vigilancia a la ruta de desconexión. En este caso se permite un funcionamiento limitado del sistema de servodirección para evitar procesos de desconexión repentinos.
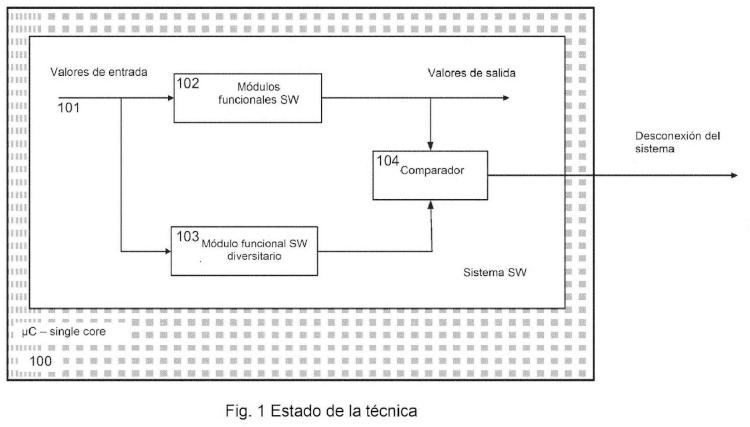
La Figura 1 muestra una arquitectura de ordenador según el estado de la técnica. En una unidad de microcontrolador single core (100) se alimentan valores de entrada (101) a una ruta de control (102) , que contiene distintos módulos funcionales software (SW) y a una ruta de vigilancia (103) , que tiene una estructura correspondientemente diversitaria (módulo funcional SW diversitario) .
Típicamente se usa como magnitud de entrada el momento de barra de torsión medido, que se palpa mediante un sensor en el árbol de dirección. En función de este momento, se determina una especificación del valor teórico para el momento de asistencia como magnitud de salida usándose funciones de la dirección y, dado el caso, otras funciones del confort de dirección.
Mediante un comparador (104) se detectan diferencias entre los resultados de cálculos de funciones de la ruta de control (102) y de la ruta de vigilancia (103) .
La ruta de vigilancia (103) implementa un módulo funcional SW correspondientemente diversitario respecto al módulo funcional SW originario, usándose un algoritmo distinto de la ruta de control.
El comparador (104) compara los resultados a nivel funcional, para detectar errores sistemáticos en el software.
Si el comparador detecta una diferencia, hay que partir de un error de cálculo o de un error sistemático del software. Como reacción a un resultado diferente, se produce la desconexión inmediata del sistema en conjunto (desconexión del sistema) .
Al usar un microordenador "redundant core" (200) , un ordenador en el que están integradas dos unidades de cálculo idénticas (core 1, core 2) en un chip, está previsto que los comandos de cálculo se ejecuten en paralelo, prácticamente en el mismo momento. Los distintos resultados de cálculo se comparan automáticamente a nivel granular mediante un comparador de núcleos (205) . En caso de haber una diferencia entre los resultados de las dos ALUs, se provoca una reacción correspondiente a un error. Esto conduce por lo general a una desconexión y, por lo tanto, a una transición al estado seguro del sistema.
Con la introducción de la norma de seguridad ISO 26262 se exigen medidas para la detección de errores sistemáticos del SW. Esta exigencia puede cumplirse, por ejemplo, mediante la implementación de algoritmos diversitarios de la ruta de control y de la ruta de vigilancia (véase en el estado de la técnica) . Si ahora se produce en 2 5
un sistema así concebido una diferencia entre la ruta de control y la ruta de vigilancia, no se trata de un error de cálculo sino de un error sistemático del SW o de un estado de funcionamiento del sistema, que no puede ser diagnosticado en uno o en los dos niveles. Si se produce este estado, el sistema también se desconecta de forma inmediata. Además, un C "dual core" según el estado de la técnica dispone de un comparador de núcleos implementado en el hardware. Este compara a nivel granular las distintas etapas de cálculo de las ALUs de los dos núcleos del micrordenador.
Si ahora se produce un error en el cálculo diversitario y el comparador de núcleos no detecta ninguna diferencia en el cálculo de los dos núcleos (core 1, core 2) , el error tiene su causa en el software o se presenta un estado del sistema que no puede ser dominado.
La solución según la invención prevé que en este caso el sistema no se desconecte de forma inmediata sino que se pase a un funcionamiento de emergencia, en el que puede garantizarse un guiado seguro del vehículo, dado el caso con una restricción del nivel de confort disponible en comparación con el pleno funcionamiento.
Por consiguiente, se propone una arquitectura de ordenador y funcional para el funcionamiento de una dirección asistida eléctrica, en la que se ejecutan prácticamente en paralelo una ruta de control y una ruta de vigilancia realizada de modo diversitario respecto a ésta en dos núcleos respectivamente asignados de un microordenador redundante y se detectan las diferencias de cálculo que se producen en la ruta de control o en la ruta de vigilancia a nivel funcional mediante un comparador y se detectan los resultados de las distintas etapas de cálculo a nivel granular mediante un comparador de núcleos, pasándose en consecuencia de la diferencia detectada por el comparador a nivel funcional a un funcionamiento de emergencia, en caso de que el comparador de núcleos no haya diagnosticado ningún error de cálculo, para garantizar que siga estando disponible al menos una parte de la asistencia a la dirección o de las funciones de dirección, al menos durante un tiempo determinado.
Además, la invención prevé que el funcionamiento de emergencia esté implementado mediante un programa de control específico (programa de emergencia) . El programa de emergencia puede estar realizado mediante una implementación y una parametrización correspondiente del programa de control respecto al tiempo de funcionamiento (en caso de producirse un error) .
Aquí, los valores de salida en el funcionamiento de emergencia son calculados por el programa de emergencia.
En una variante de realización especialmente preferible de la invención está previsto que el programa de emergencia esté implementado como módulo separado (programa de emergencia) y que esté preparado en la memoria de programas para su ejecución. En el funcionamiento normal, es decir, en el funcionamiento sin errores, no se ejecuta. Solo se activa en caso de haberse diagnosticado un error.
Según la invención está previsto que el funcionamiento de emergencia trabaje según una de las estrategias indicadas a continuación:
- la asistencia a la dirección se limita a un valor que está concebido como valor reducido en comparación con un valor normal o -la asistencia a la dirección se limita a un valor que está concebido como valor reducido en comparación con un valor normal, realizándose la reducción en función de la situación y/o de forma controlada en el tiempo mediante una rampa o -la... [Seguir leyendo]
Reivindicaciones:
1. Una arquitectura de ordenador y funcional para el funcionamiento de una dirección asistida eléctrica, caracterizada por que se ejecutan prácticamente en paralelo una ruta de control (202) y una ruta de vigilancia (203)
realizada de modo diversitario respecto a ésta en dos núcleos (core 1, core 2) respectivamente asignados de un microordenador (200) redundante y se detectan las diferencias de cálculo que se producen en la ruta de control (202) o en la ruta de vigilancia (203) a nivel funcional mediante un comparador (204) y se detectan los resultados de las distintas etapas de cálculo a nivel granular mediante un comparador de núcleos (205) , pasándose en consecuencia de la diferencia detectada por el comparador (204) a nivel funcional a un funcionamiento de emergencia (206) , en caso de que el comparador de núcleos (205) no haya diagnosticado ningún error de cálculo, para garantizar que siga estando disponible al menos una parte de la asistencia a la dirección o de las funciones de dirección, al menos durante un tiempo determinado.
2. La arquitectura de ordenador y funcional para el control de una dirección asistida eléctrica o una servodirección de acuerdo con la reivindicación 1, caracterizada por que el funcionamiento de emergencia (206) está implementado mediante un programa de emergencia específico.
3. La arquitectura de ordenador y funcional para el control de una dirección asistida eléctrica o una servodirección de acuerdo con la reivindicación 1 o 2, caracterizada por que el funcionamiento de emergencia (206) trabaja según 20 una de las estrategias indicadas a continuación:
- la asistencia a la dirección se limita a un valor que está concebido como valor reducido en comparación con un valor normal o -la asistencia a la dirección se limita a un valor que está concebido como valor reducido en comparación con 25 un valor normal, realizándose la reducción en función de la situación y/o de forma controlada en el tiempo mediante una rampa o -la asistencia a la dirección se reduce al valor cero, realizándose la reducción en función de la situación y/o de forma controlada en el tiempo mediante una rampa.
4. Una unidad de control o unidad combinada de motor/unidad de control, caracterizada por que presenta una arquitectura de ordenador y funcional reivindicada de acuerdo con las reivindicaciones 1 a 3.
5. Una dirección asistida, caracterizada por que está equipada con una unidad de control o una unidad combinada de motor/unidad de control de acuerdo con la reivindicación 4. 35
Patentes similares o relacionadas:
Estimación de la temperatura de una bobina, del 27 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Método para la estimación del incremento de temperatura perdido (TIncrementoPerdido) después de reiniciar un sistema para la estimación de la temperatura de una […]
Husillo de rosca de bolas de una dirección asistida electromecánica con cojinete de bolas de contacto angular integrado y compensación de diferentes dilataciones térmicas, del 13 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un vehículo de motor, con un servomotor que acciona un componente , desplazable axialmente, por medio de una tuerca […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende • un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Dispositivo de vigilancia externo con soporte de regeneración inversa integrado, del 1 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Un aparato de servodirección eléctrica para asistir a la dirección de un vehículo de motor al conferir par generado por un motor eléctrico a un mecanismo […]
Mecanismo de absorción de impactos de un motor de dirección, del 4 de Marzo de 2020, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un mecanismo de absorción de impactos de un motor de dirección, configurado para disponerse dentro del motor de dirección, y que comprende: un conjunto […]
Accionamiento de husillo, del 20 de Noviembre de 2019, de SFS INTEC HOLDING AG: Husillo roscado con una parte de accionamiento , que presenta un eje longitudinal (A) y está alojada a través de un primer cojinete , […]
Chasis de vehículo eléctrico y vehículo eléctrico que usa el mismo, del 13 de Noviembre de 2019, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un chasis de vehículo eléctrico que comprende un sistema de bastidor , un sistema de amortiguación de motor de dirección montado en el sistema de bastidor […]
Dispositivo para generar una fuerza auxiliar en un sistema de dirección de un automóvil, del 23 de Octubre de 2019, de THYSSENKRUPP PRESTA AG: Dispositivo para aplicar una fuerza auxiliar en un sistema de dirección de automóvil, que comprende un tornillo helicoidal de accionamiento conectable […]