Dispositivo y procedimiento para un aparato de visión.
Un sistema de visión (100) para guiar un misil hacia un objetivo en movimiento (9),
comprendiendo el sistemade visión (100): un generador (1) del haz de guiado para generar un haz de guiado (8) para permitir que el misilsiga el objetivo,
un primer dispositivo de visión (2) para recibir la luz visible y / o un segundo dispositivo de visión (3) para recibirla luz no visible que es irradiada desde el objetivo, comprendiendo el primer dispositivo de visión (2) una primeramarca de alineación ajustable (12) dispuesta para ser ajustada alineada con un eje (17) del haz de guiado (8),comprendiendo el segundo dispositivo de visión (3) una segunda marca de alineación ajustable (13) dispuestapara ser ajustada alineada con el eje (17) del haz de guiado (8), en el que el sistema (100) comprende, además,un colimador (4) para alinear la primera marca de alineación (12) y / o la segunda marca de alineación (13) conel eje (17) del haz de guiado (8), en el que el colimador (4) comprende una fuente de luz (11) y un detector (10)del haz de guiado dispuestos juntos en una posición común, estando dispuesto el detector (10) del haz de guiadopara detectar el haz de guiado (8) para calcular la posición del eje (17) del haz de guiado (8) en relación conel detector (10) del haz de guiado, estando dispuesta la fuente de luz para ser detectada en el primer dispositivode visión (2) para alinear la primera marca de alineación (12) con el eje (17) del haz de guiado (8) y / o estandodispuesta la fuente de luz para ser detectada en el segundo dispositivo de visión (3) para alinear la segundamarca de alineación (13) con el eje (17) del haz de guiado (8) y en el que la fuente de luz (11) comprende unaprimera fuente de luz que produce luz visible que tiene una primer longitud de onda que es detectada por el primerdispositivo de visión (2), y / o
una segunda fuente de luz que produce luz no visible con una segunda longitud de onda que es detectada porel segundo dispositivo de visión (3) que se caracteriza porque la fuente de luz (11) y el detector (10) del hazde guiado es un diodo que está dispuesto para producir luz visible y / o luz no visible cuando está polarizado enuna dirección y que está dispuesto para detectar la luz cuando está polarizado en la dirección opuesta.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07108064.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: 581 88 LINKÖPING SUECIA.
Inventor/es: LINDGREN, MIKAEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F41G3/32 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41G APARATOS DE MIRA; PUNTERIA (aspectos ópticos G02B). › F41G 3/00 Aparatos de puntería (dispositivos de mira F41G 1/00; determinación de la dirección, la distancia o la velocidad mediante ondas de radio u otras ondas G01S; computadores G06; antenas H01Q). › Dispositivos para ensayos o verificaciones.
- F41G7/26 F41G […] › F41G 7/00 Sistemas de control de la dirección para misiles autopropulsados (control de vuelos B64C, G05D 1/00; proyectiles autopropulsados o misiles con sistemas de control únicamente instalados a bordo F42B 15/01; torpedos-cohetes F42B 17/00; torpedos marinos o minas marinas con medios de propulsión autónomos F42B 19/00; localización del blanco mediante ondas de radio u de otro tipo G01S; bajo el aspecto calculador G06). › Sistemas de guiado ópticos.
PDF original: ES-2438976_T3.pdf
Fragmento de la descripción:
Dispositivo y procedimiento para un aparato de visión
Campo técnico
La invención se refiere a un sistema de visión para guiar un misil hacia un objetivo. El sistema de visión comprende un generador del haz de guiado para generar un haz de guiado que se puede utilizar para que el misil se acople al objetivo y lo siga. El sistema de visión comprende un primer dispositivo de visión para recibir la luz visible desde el objetivo y / o un segundo dispositivo de visión para recibir la luz no visible desde el objetivo. El primer dispositivo de visión comprende una primera marca de alineación ajustable dispuesta para ser ajustada alineada con un eje del haz de guiado. El segundo dispositivo de visión comprende una segunda marca de alineación ajustable dispuesta para ser ajustada alineada con el eje del haz de guiado. El sistema de visión comprende un colimador para alinear la primera marca de alineación y / o la segunda marca de alineación con el eje del haz de guiado.
Técnica antecedente En el campo de la visualización para los sistemas de misiles que utilizan un haz de guiado de láser para guiar los misiles, se conoce el uso de un colimador para alinear el haz de guiado con una marca de alineación en un dispositivo de visión. El dispositivo de visión puede ser una cámara u otro dispositivo que puede detectar continuamente la luz visible o no visible y que pueda presentar el resultado detectado. La marca de alineación en el dispositivo de visión marca la posición del haz de guiado en el dispositivo de visión, de manera que un operador puede dirigir el haz de guiado hacia un objetivo apuntando la marca de alineación hacia el objetivo en consecuencia. La marca de alineación puede ser un signo generado electrónicamente, por ejemplo en forma de un retículo.
El colimador comprende un detector de luz y un número de fuentes de luz que pueden ser detectadas por los dispositivos de visualización. Las fuentes de luz deben ser capaces de producir luz visible para el dispositivo de visión de luz visible y luz no visible para el dispositivo de visión de luz no visible. El colimador puede estar unido de manera fija al visor o puede estar unido de manera separable al visor . Con el fin de que el visor trabaje es imperativo que el dispositivo de visión esté calibrado para que conozca siempre la trayectoria del haz de guiado, es decir, la posición del haz de guiado en el campo de visión del dispositivo de visión tiene que ser conocida. Por lo tanto, el dispositivo de visión, es decir, la marca de alineación, y el haz de guiado director tienen que estar alineados.
El problema de alineación puede ser resuelto mediante la fijación del haz de guiado en relación con la marca de alineación, pero esta es una operación costosa y difícil, ya que es muy exigente, tanto en la calidad de los materiales utilizados como en las tolerancias en la fabricación del visor.
Otra solución al problema de alineación es utilizar un colimador adaptativo / activo que puede ajustar continuamente la marca de alineación del haz de guiado. En este último caso, se conoce el uso de un detector para detectar un eje de simetría del haz de guiado y un número de fuentes de luz visible y no visible dispuestas en posiciones predeterminadas alrededor del detector. Las posiciones conocidas de las fuentes de luz permiten el cálculo de la posición de la marca de alineación en relación con el eje de simetría del haz de guiado. Para que funcione esta solución, se debe realizar un número de cálculos, lo cual consume energía y recursos de computación. Además, las posiciones de las fuentes de luz relativas al detector se tienen que conocer con precisión pues, de lo contrario, la marca de alineación estará desalineada. La precisión de las posiciones exige mucho a las piezas que intervienen en el montaje y a la operación de montaje en sí.
Por lo tanto, hay una necesidad de una solución alternativa a la anterior, en la que el número de cálculos se puede disminuir y en la que el montaje del visor y del colimador se puede hacer de una manera más simple y robusta.
El documento de patente US - A - 5 410 398 desvela un dispositivo para compensar automáticamente los errores dinámicos de eje de puntería entre una línea visual del visor y el centro aparente de un haz de radiación emitido por el dispositivo. La radiación emitida por el dispositivo se utiliza para guiar un misil "que está montado sobre el haz " a su objetivo. Los diversos sectores del haz radiado por el dispositivo son modulados por diferentes códigos de manera que el misil puede detectar el centro aparente del haz. Los sistemas ópticos dentro del dispositivo detectan la extensión en la que la línea visual del visor se desvía del centro aparente del haz radiado por medio de mediciones realizadas sobre la coincidencia de la línea visual del visor y del centro aparente del haz de radiación dentro del dispositivo. El dispositivo altera entonces la codificación del haz radiado de manera que el centro aparente del haz radiado mantiene la alineación con la línea visual del visor.
Revelación de la invención La invención se refiere a una solución simple y robusta para un sistema de visión y un procedimiento para la alineación del sistema de visión.
La invención se refiere a un sistema de visión para guiar un misil hacia un objetivo en movimiento. El sistema de visión comprende un generador del haz de guiado para generar un haz de guiado que se puede utilizar para que el misil siga el objetivo.
El generador del haz de guiado produce ventajosamente un haz de láser que barre alternativamente en al menos dos direcciones perpendiculares y de ese modo crea el haz de guiado. El eje de simetría del haz de guiado es importante para el sistema ya que el misil puede seguir el haz de guiado mediante el uso de un detector de radiación, siempre y cuando se encuentre dentro del pasillo creado por el haz de guiado. Al conocer el eje de simetría del haz de guiado un operador del sistema de visión puede apuntar y señalar el eje de simetría del haz de guiado hacia el objetivo y proporcionar al misil de esta manera una máxima libertad de movimiento dentro del haz de guiado.
Con el fin de poder apuntar y señalar, el sistema de visión comprende un primer dispositivo de visión para la visualización del objetivo usando luz visible. El sistema comprende también ventajosamente un segundo dispositivo de visión para observar el objetivo usando luz no visible. Se debe hacer notar que la invención puede ser utilizada con el primer dispositivo de visión cuando se utiliza solo y con el segundo dispositivo de visión cuando se utiliza solo, o cuando ambos dispositivos de visualización primero y segundo se utilizan al mismo tiempo. Además, se pueden añadir al sistema dispositivos de visualización adicionales y utilizar la invención en consecuencia. El primer dispositivo de visión puede ser una cámara que puede observar el objetivo durante la luz del día o con un visor óptico. El segundo dispositivo de visión puede ser una cámara que puede observar el objetivo con visibilidad reducida. El segundo dispositivo de visión puede ser una cámara de luz no visible. El segundo dispositivo de visión puede ser, por ejemplo, un dispositivo de visión sensible al calor, tal como una cámara de infrarrojos. Por lo tanto, la luz no visible puede ser una luz infrarroja que irradia desde un objeto caliente. Sin embargo, la luz no visible también podría ser una luz no visible que tiene una longitud de onda diferente de los infrarrojos, por ejemplo luz ultravioleta.
El primer dispositivo de visión comprende una primera marca de alineación ajustable que está dispuesta para ser ajustada alineada con un eje del haz de guiado. El segundo dispositivo de visión comprende una segunda marca de alineación ajustable que está dispuesta para ser ajustada alineada con el eje del haz de guiado. El sistema de visión comprende también un colimador para la alineación de la primera marca de alineación y / o de la segunda marca de alineación con el eje del haz de guiado. Cuando el sistema es alineado, la marca o marcas de alineación se pueden hacer visibles al operador en el dispositivo de visión, por ejemplo, como un retículo, de manera que el operador puede apuntar, señalar y seguir fácilmente un objetivo seleccionado o la misma fuente de luz puede actuar como una marca de alineación.
En la presente memoria descriptiva, "alineación" se refiere a un procedimiento para llevar la marca de alineación a una posición en el dispositivo de visión de manera que la línea de visión entre la marca de alineación y el objetivo sea colineal con el eje del haz, es decir, la línea de visión es paralela y está alineada con el eje del haz de guiado y también está... [Seguir leyendo]
Reivindicaciones:
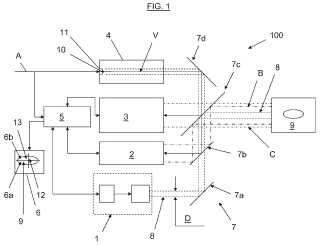
1. Un sistema de visión (100) para guiar un misil hacia un objetivo en movimiento (9) , comprendiendo el sistema de visión (100) : un generador (1) del haz de guiado para generar un haz de guiado (8) para permitir que el misil siga el objetivo,
un primer dispositivo de visión (2) para recibir la luz visible y / o un segundo dispositivo de visión (3) para recibir la luz no visible que es irradiada desde el objetivo, comprendiendo el primer dispositivo de visión (2) una primera marca de alineación ajustable (12) dispuesta para ser ajustada alineada con un eje (17) del haz de guiado (8) , comprendiendo el segundo dispositivo de visión (3) una segunda marca de alineación ajustable (13) dispuesta para ser ajustada alineada con el eje (17) del haz de guiado (8) , en el que el sistema (100) comprende, además, un colimador (4) para alinear la primera marca de alineación (12) y / o la segunda marca de alineación (13) con el eje (17) del haz de guiado (8) , en el que el colimador (4) comprende una fuente de luz (11) y un detector (10) del haz de guiado dispuestos juntos en una posición común, estando dispuesto el detector (10) del haz de guiado para detectar el haz de guiado (8) para calcular la posición del eje (17) del haz de guiado (8) en relación con el detector (10) del haz de guiado, estando dispuesta la fuente de luz para ser detectada en el primer dispositivo de visión (2) para alinear la primera marca de alineación (12) con el eje (17) del haz de guiado (8) y / o estando dispuesta la fuente de luz para ser detectada en el segundo dispositivo de visión (3) para alinear la segunda marca de alineación (13) con el eje (17) del haz de guiado (8) y en el que la fuente de luz (11) comprende una primera fuente de luz que produce luz visible que tiene una primer longitud de onda que es detectada por el primer dispositivo de visión (2) , y / o una segunda fuente de luz que produce luz no visible con una segunda longitud de onda que es detectada por el segundo dispositivo de visión (3) que se caracteriza porque la fuente de luz (11) y el detector (10) del haz de guiado es un diodo que está dispuesto para producir luz visible y / o luz no visible cuando está polarizado en una dirección y que está dispuesto para detectar la luz cuando está polarizado en la dirección opuesta.
2. Un sistema de visión (100) de acuerdo con la reivindicación 1, que se caracteriza porque la fuente de luz (11) y el detector del haz de guiado (10) es un fotodiodo.
3. Un sistema de visión (100) de acuerdo con una cualquiera de las reivindicaciones anteriores, que se caracteriza porque el sistema de visión (100) comprende una disposición de espejos (7) dispuesta para guiar el haz de guiado (8) desde el generador (1) del haz de guiado al detector del haz (10) en el colimador (4) y dispuesta para guiar la luz desde la fuente de luz (11) en el colimador (4) al primer dispositivo de visión (2) y / o al segundo dispositivo de visión (3) .
4. Un sistema de visión (100) de acuerdo con una cualquiera de las reivindicaciones anteriores, que se caracteriza porque la disposición de espejos (7) está dispuesta para guiar el haz de guiado del generador del haz de guiado a una abertura de salida en el sistema de visión (100) de manera que el haz de guiado es dirigido hacia el objetivo.
5. Un sistema de visión (100) de acuerdo con una cualquiera de las reivindicaciones anteriores, que se caracteriza porque la disposición de espejos está dispuesta para guiar la luz que es irradiada desde el objetivo (9) al primer dispositivo de visión (2) y / o al segundo dispositivo de visión (3) .
6. Un sistema de visión (100) de acuerdo con una cualquiera de las reivindicaciones anteriores, que se caracteriza porque al menos algunos de los espejos son espejos parcialmente reflectantes.
7. Un sistema de visión (100) de acuerdo con una cualquiera de las reivindicaciones anteriores, que se caracteriza porque el primer dispositivo de visión (2) es una cámara para luz visible
8. Un sistema de visión (100) de acuerdo con una cualquiera de las reivindicaciones anteriores, que se caracteriza porque el segundo dispositivo de visión (3) es una cámara para luz no visible.
9. Un sistema de visión (100) de acuerdo con la reivindicación 8, que se caracteriza porque la luz no visible está en el rango de las longitudes de onda infrarroja.
10. Un sistema de visión (100) de acuerdo con una cualquiera de las reivindicaciones anteriores, que se caracteriza porque el sistema de visión (100) comprende una unidad de control (5) dispuesta para controlar la posición de la primera marca de alineación (12) en el primer dispositivo de visión (2) y / o de la segunda marca de alineación (3) en el segundo dispositivo de visión (3) .
11. Un sistema de visión (100) de acuerdo con la reivindicación 10, que se caracteriza porque la unidad de control
(5) está dispuesta para comunicarse con el colimador (4) y el generador (1) del haz de guiado y el primer dispositivo de visión (2) y / o el segundo dispositivo de visión (3) para ajustar la primera marca de alineación (12) y / o la segunda marca de alineación (13) alineada con el eje (17) del haz de guiado (8) .
12. Un sistema de visión (100) de acuerdo con una cualquiera de las reivindicaciones anteriores, que se caracteriza porque el sistema de visión comprende un generador de símbolos para la generación de la primera marca de alineación (2) y / o de la segunda marca de alineación (3) .
13. Un sistema de visión (100) de acuerdo con la reivindicación 12, que se caracteriza porque la unidad de control
(5) está dispuesta para controlar el generador de símbolos para presentar la primera marca de alineación (12) en el primer dispositivo de visión (2) y / o la segunda marca de alineación (13) en el segundo dispositivo de visión (3) .
14. Un sistema de visión (100) de acuerdo con una cualquiera de las reivindicaciones 10-13, que se caracteriza porque la unidad de control (5) está dispuesta para transmitir una imagen desde el primer dispositivo de visión
(2) y / o una imagen desde el segundo dispositivo de visión (3) a una unidad de visualización remota (6; 6a, 6b) .
15. Un sistema de visión (100) de acuerdo con una cualquiera de las reivindicaciones 10-13, que se caracteriza porque la unidad de control (5) está dispuesta para transmitir la imagen desde el segundo dispositivo de visión
(3) a una unidad de visualización (6) siendo utilizado por el primer dispositivo de visión (2) para ayudar a dirigir el haz de guiado (8) al objetivo (9) en condiciones de visibilidad reducida
16. Un sistema de visión (100) de acuerdo con una cualquiera de las reivindicaciones anteriores, que se caracteriza porque el primer dispositivo de visión (2) es un visor óptico
17. Un sistema de visión (100) de acuerdo con la reivindicación 16, que se caracteriza porque la unidad de control
(5) está dispuesta para transmitir una imagen desde el segundo dispositivo de visión (3) al visor óptico para la visualización con el fin de ayudar a dirigir el haz de guiado (8) hacia el objetivo (9) en condiciones de visibilidad reducida.
18. Un sistema de visión (100) de acuerdo con una cualquiera de las reivindicaciones anteriores, que se caracteriza porque el eje (17) es el eje de simetría (17) del haz de guiado (8)
19. Un sistema de visión (100) de acuerdo con una cualquiera de las reivindicaciones anteriores, que se caracteriza porque el haz de guiado (8) comprende un cierto número de rayos láser que realizan el barrido sobre un área seleccionada.
20. Un procedimiento para alinear un sistema de visión (100) para guiar un misil hacia un objetivo en movimiento (9) , que comprende las etapas de
generar un haz de guiado (8) para permitir que el misil siga el objetivo,
recibir, en un primer dispositivo de visión (2) , la luz visible, y / o recibir, en un segundo dispositivo de visión (3) , la luz no visible que es irradiada desde el objetivo (9) , comprendiendo el primer dispositivo de visión (2) una primera marca de alineación ajustable (12) que es ajustada alineada con un eje (17) del haz de guiado (8) , comprendiendo el segundo dispositivo de visión (3) una segunda marca de alineación ajustable (13) que es ajustada alineada con el eje (17) del haz de guiado (8) , en el que el sistema (100) comprende un colimador (4) para alinear la primera marca de alineación (12) y / o la segunda marca de alineación (13) con el eje (17) del haz de guiado (8) , en el que el colimador (4) comprende una fuente de luz (11) y un detector (10) del haz de guiado dispuestos juntos en una posición común, detectando el detector (10) del haz de guiado el haz de guiado (8) para calcular la posición del eje
(17) del haz de guiado (8) en relación con el detector (10) del haz, estando dispuesta la fuente de luz para ser detectada en el primer dispositivo de visión (2) para la alineación de la primera marca de alineación (12) con el eje (17) del haz de guiado (8) y / o estando dispuesta la fuente de luz para ser detectada en el segundo dispositivo de visión (3) para la alineación de la segunda marca de alineación (13) con el eje (17) del haz de guiado (8) y en el que la fuente de luz (11) comprende una primera fuente de luz que produce la luz visible que tiene una primer longitud de onda que es detectada por el primer dispositivo de visión (2) y / o una segunda fuente de luz que produce la luz no visible con una segunda longitud de onda que es detectada por el segundo dispositivo de visión (3) , que se caracteriza porque la fuente de luz (11) y el detector
(10) del haz de guiado es un diodo que produce luz visible y / o luz no visible cuando está polarizado en una dirección y que detecta luz cuando está polarizado en la dirección opuesta.
21. Un procedimiento para un sistema de visión (100) de acuerdo con la reivindicación 20, que se caracteriza porque la fuente de luz (11) y el detector (10) del haz de guiado es un fotodiodo.
Patentes similares o relacionadas:
Método y montaje para posicionar y alinear un disruptor para desmantelar un objetivo, del 4 de Diciembre de 2019, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Procedimiento de posicionamiento y de alineación de un disruptor destinado al desmantelamiento de un objetivo y que comprende un eje de tiro, una dirección de tiro […]
Recuperador balístico de láminas de caucho natural, del 7 de Noviembre de 2019, de BLÁZQUEZ GUERRERO, Emilio José: 1. Recuperador balístico de láminas de caucho natural caracterizado porque consta de tres partes diferenciadas: Primera - Caja de disparo: […]
 Varilla balística para fotogrametría y láser escáner, del 8 de Septiembre de 2014, de UNIVERSIDAD DE SALAMANCA: Varilla balística para laser escáner y fotogrametría.
Varilla balística para sistemas de escaneo láser y fotogramétricos en ingeniería forense que permite […]
Varilla balística para fotogrametría y láser escáner, del 8 de Septiembre de 2014, de UNIVERSIDAD DE SALAMANCA: Varilla balística para laser escáner y fotogrametría.
Varilla balística para sistemas de escaneo láser y fotogramétricos en ingeniería forense que permite […]
Dispositivo de calibración automática de una mira óptica para armas de fuego, disparando un solo cartucho, del 14 de Agosto de 2013, de SAAB AB: Dispositivo de calibración automática de retículos en cruz mecánicos en una mira óptica para armas de fuego, cuando un tirador dispara una bala a un blanco definido, […]
PROCEDIMIENTO Y DISPOSITIVO PARA EVALUAR LOS ERRORES DE PUNTERIA DE UN SISTEMA DE ARMA Y USO DEL DISPOSITIVO., del 16 de Mayo de 2006, de OERLIKON CONTRAVES AG: Procedimiento para evaluar los errores de puntería de un sistema de arma que presenta - un aparato de dirección de tiro (F) para seguir un objetivo (Z), […]
DISPOSITIVOS PARA LA ARMONIZACION ENTRE UNA VIA DE EMISION LASER Y UNA VIA PASIVA DE OBSERVACION., del 1 de Julio de 2005, de THALES: Dispositivo para la armonización entre una vía de emisión de un impulso láser hacia una escena y una vía pasiva de observación de la escena, comprendiendo la vía de observación […]
PROCEDIMIENTO Y DISPOSITIVO PARA CORREGIR ERRORES DE ALINEACION ENTRE APARATOS., del 16 de Junio de 2005, de OERLIKON CONTRAVES AG: Procedimiento para corregir errores de alineación entre un dispositivo sensor (T; T1, T2) y un dispositivo efector (G; G1, G2, G3) controlado por […]
 APARATO DE VISION TELEMETRICA LASER, del 1 de Marzo de 2009, de SAGEM DEFENSE SECURITE: Aparato de visión telemétrica que comprende: - una fuente láser adecuada para emitir un haz láser de telemetría sobre un eje óptico de visión telemétrica, - una […]
APARATO DE VISION TELEMETRICA LASER, del 1 de Marzo de 2009, de SAGEM DEFENSE SECURITE: Aparato de visión telemétrica que comprende: - una fuente láser adecuada para emitir un haz láser de telemetría sobre un eje óptico de visión telemétrica, - una […]