Dispositivo de calibración automática de una mira óptica para armas de fuego, disparando un solo cartucho.
Dispositivo de calibración automática de retículos en cruz mecánicos (9) en una mira óptica para armas de fuego,
cuando un tirador dispara una bala a un blanco definido, estando dicho dispositivo ensamblado junto con la mira, o proporcionado como un dispositivo separado adjunto, incluyendo dicho dispositivo:
una cámara digital (2) que registra tramas de imagen,
un divisor de haz (1) colocado en la línea de mira, servomotores (4) controlados electrónicamente para el ajuste de los retículos en cruz (9), y
un microprocesador adaptado para llevar a cabo los siguientes etapas para conseguir la calibración automática de los retículos en cruz (9):
almacenar la última trama de imagen antes del disparo,
determinar la posición de los retículos en cruz (9) respecto del blanco en dicha última trama de imagen antes del disparo, identificar la posición del orificio de bala en el blanco en una trama de imagen registrada por la cámara digital (2) después del disparo,
calcular el ajuste necesario para alinear los retículos en cruz (9) con el agujero de bala,
controlar los servomotores para que ejecuten el ajuste de los retículos en cruz.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2005/001488.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: 581 88 LINKÖPING SUECIA.
Inventor/es: JOHANSSON,GERT I, BACKLUND,GÖRAN M.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F41G3/32 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41G APARATOS DE MIRA; PUNTERIA (aspectos ópticos G02B). › F41G 3/00 Aparatos de puntería (dispositivos de mira F41G 1/00; determinación de la dirección, la distancia o la velocidad mediante ondas de radio u otras ondas G01S; computadores G06; antenas H01Q). › Dispositivos para ensayos o verificaciones.
PDF original: ES-2431612_T3.pdf
Fragmento de la descripción:
Dispositivo de calibración automática de una mira óptica para armas de fuego, disparando un solo cartucho
Campo técnico El dispositivo ofrece un medio para calibrar automáticamente una mira óptica para armas de fuego, disparando un solo cartucho.
Antecedentes de la invención Para enfocar o calibrar un arma de fuego equipada de una mira óptica, típicamente una mira del riflel, es habitualmente un procedimiento tedioso y en alguna medida propenso al error. Se necesitan varios disparos habitualmente para una calibración exitosa. Los cazadores disparan habitualmente un par de cartuchos de punta blanda de precio elevado para confirmar la calibración.
El dispositivo descrito en la presente solicitud ofrece a los tiradores la posibilidad de conseguir calibrar automáticamente la mira óptica (mira de rifle) , disparando un solo cartuchoa un blanco definido.
El documento US 6 363 223 B1 describe el uso de una cámara digital junto con una mira óptica. Sin embargo, el documento US 6 363 223 B1, describe una solución con el objetivo de fotografiar el blanco durante el disparo/caza, o eventualmente eliminar totalmente la mira óptica tradicional, usando la cámara tanto para fotografiar como para apuntar.
La innovación actual describe el uso de una cámara digital junto con una mira óptica que ofrece una nueva función; el objetivo es conseguir una calibración totalmente automática del elemento de retículos en cruz (mecánicos o digitales) en una mira óptica. El documento US 6 363 223 B1 describe que se requiere información acerca de la distancia al blanco y la velocidad de la munición para ajustar la cámara digital como una mira. La innovación actual no necesita tales datos, y sigue ofreciendo una calibración automática.
El documento US 5 375 072 A comprende un dispositivo informatizado con telémetro, siendo el objetivo la compensación de la trayectoria balística de armas pequeñas. El documento US 5 375 072 A ofrece compensación de trayectoria balística para una gran variedad de parámetros, pero de nuevo, se basa en otros medios para su realización distintos del análisis de imagen – que es una tecnología clave de la presente invención. El documento US 5 375 072 A está basado en un gran número de parámetros medidos y a continuación se calcula teóricamente la compensación. En esta patente tales datos no son necesarios y la compensación solo se deriva del análisis de imagen, y se ajusta la mira óptica.
El documento GB 2 241 312 A describe el ajuste de un anteojo óptico. Sin embargo en el documento GB 2 241 312 A se cuenta con un haz láser para determinar el error, mientras que esta innovación no usa tal técnica, sino análisis de imagen. En la presente invención se cuenta con realimentación a partir del propio orificio de bala, y en consecuencia no se necesita información acerca de parámetros como la distancia y la trayectoria balística.
Sumario de la invención Por retículos en cruz se entienden todas las variantes existentes de miras ópticas.
La secuencia de calibración se describe mediante la siguiente instrucción al tirador:
Disponer un blanco (típicamente: una superficie cuadrada blanca contra un fondo oscuro) y adoptar la posición de disparo en el alcance para el cual se ha de calibrar el arma de fuego.
Iniciar la función de calibración pulsando el conmutador.
Apuntar y disparar una bala al blanco.
Después de disparar la bala, apuntar de nuevo al blanco e identificar visualmente el orificio de bala.
Mantener de manera estable los retículos en cruz, cuando se enciende la lámpara verde, la calibración es exitosa.
La función de calibración se desactiva pulsando de nuevo el conmutador.
Función: cuando el procedimiento de calibración se inicia mediante el conmutador, se ponen en marcha el microprocesador y la cámara. La cámara empieza inmediatamente a tomar tramas (con un intervalo típico entre tramas de 40 ms) y las almacena en una cola FIFO (primero en entrar, primero en salir) .
El microprocesador detecta que una bala ha sido disparada cuando el blanco desaparece de repente de la vista (ocurre muy rápidamente; es decir, de una trama a la otra) . De manera alternativa se puede usar un sensor integrado para registrar este evento.
La última exposición antes del disparo se almacena para su posterior análisis; los bordes del área blanca de blanco son identificados por contraste con el fondo más oscuro.
Después de disparar la bala, el tirador vuelve a adoptar la posición de apuntamiento mientras la cámara sigue tomando tramas y almacenándolas en la cola FIFO. Se identifica la mejor trama después del disparo y a continuación se compara con la mejor trama antes del disparo. La posición de orificio de bala en el blanco se identifica por variación en contraste (punto negro en la superficie blanca) .
Mientras el tirador mantiene los retículos en cruz en el blanco, el microprocesador calcula el ajuste necesario. Esto significa tanto ajustes horizontales como verticales por “clics”, para alinear el orificio de bola con los retículos en cruz. Puesto que la posición de retículos en cruz se determina respecto del blanco en el campo de visión entero – tanto antes como después del disparo de la bala- el ajuste necesario se puede calcular independientemente del alcance y el aumento de la mira de fusil. (Sin embargo, el alcance no debe desplazarse y el tirador no debe cambiar de posición durante el procedimiento de calibración) .
Los servomotores se activan entonces para que de este modo los tornillos de ajuste sean girados el número de clics necesarios tanto en direcciones horizontales como verticales. Una lámpara verde se enciende como indicación de una calibración exitosa. Si la identificación del orificio de bala falla, se enciende una lámpara roja, y el procedimiento necesita repetirse (una causa posible de fallo podría ser que la bala haya fallado el blanco) .
Cuando el tirador pulsa finalmente de nuevo el conmutador, el sistema de calibración se desactiva (apaga) .
Como se puede apreciar del procedimiento anterior, la innovación actual se basa solo en el análisis de imágenes mediante procesamiento de imágenes digitales, para determinar el error.
Breve descripción de los dibujos La figura 1 muestra una mira óptica tradicional para armas de fuego.
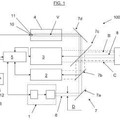
La figura 2 muestra una mira óptica totalmente digital con una pantalla de visualización en el visor.
Descripción detallada Para conseguir una calibración automática de una mira óptica para armas de fuego, una mira óptica tradicional necesita los siguientes elementos adicionales, véase la figura 1. Un divisor de haz (1) permite que el tirador y el sistema de procesamiento de imágenes vean la misma escena. La imagen se introduce en una cámara (2) (por ejemplo, una cámara de dispositivo de transferencia de carga) para su registro. Un microprocesador con suficiente memoria y software (3) analiza la imagen y determina el error (es decir, calcula la necesidad de la calibración) . Se pueden usar servomotores (4) con engranajes (5) para operar los tornillos de ajuste y el elemento de retículos de cruce mecánicos tradicionales (9) . Se usa un conmutador para iniciar la secuencia de calibración automática (6) . Las lámparas (8) (por ejemplo, diodos) indican el resultado de calibración. El dispositivo es alimentado por una fuente de alimentación eléctrica integrada o externa (7) .
Disposiciones alternativas: La implementación del dispositivo se puede ajustar al nivel deseado de tecnología y automatización como sigue:
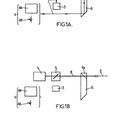
1. Mira óptica tradicional que usa un espejo semitransparente sin piezas móviles (1) . Esto se puede conseguir usando una película electrocrómica (película EC) controlada eléctricamente colocada en la línea de mira. Cuando está encendida, la película EC funciona como un espejo semitransparente.
2. Mira óptica tradicional, que divide el haz usando un espejo semitransparente móvil (1) Esto se puede conseguir mediante un espejo semitransparente operado mecánicamente. El espejo es desplazado entre posiciones biestables por una palanca en el exterior de la mira, bloqueado por forma y/o fricción.
3. Mira óptica totalmente digital con lente tradicional fija o de ampliación para miras de fusil, y una pantalla de visualización en el visor. Los retículos en cruz mecánicos no son necesarios. Esto se puede implementar mediante una cámara (2) colocada directamente en la línea de mira, un microprocesador con memoria y software (3) , y una pantalla de visualización (10) típicamente una LCD – pantalla de cristal líquido) en el visor en lugar de una lente convencional. En... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de calibración automática de retículos en cruz mecánicos (9) en una mira óptica para armas de fuego, cuando un tirador dispara una bala a un blanco definido, estando dicho dispositivo ensamblado junto con la mira, o proporcionado como un dispositivo separado adjunto, incluyendo dicho dispositivo:
una cámara digital (2) que registra tramas de imagen, un divisor de haz (1) colocado en la línea de mira, servomotores (4) controlados electrónicamente para el ajuste de los retículos en cruz (9) , y un microprocesador adaptado para llevar a cabo los siguientes etapas para conseguir la calibración automática de los retículos en cruz (9) :
almacenar la última trama de imagen antes del disparo, determinar la posición de los retículos en cruz (9) respecto del blanco en dicha última trama de imagen antes del disparo, identificar la posición del orificio de bala en el blanco en una trama de imagen registrada por la cámara digital (2) después del disparo, calcular el ajuste necesario para alinear los retículos en cruz (9) con el agujero de bala, controlar los servomotores para que ejecuten el ajuste de los retículos en cruz.
2. Dispositivo según la reivindicación 1, en el que el microprocesador (3) gestiona el muestreo de trama de imagen y almacena las tramas de imagen en una memoria intermedia a razón de 25 – 30 tramas de imagen por segundo según el principio de primero en entrar, primero en salir.
3. Dispositivo según la reivindicación 1, en el que el microprocesador (3) está diseñado para detectar el momento de disparo, por análisis de imagen, o de manera alternativa por un sensor separado, y de este modo, a partir de la cola FIFO, seleccionar la última trama de imagen obtenida inmediatamente antes del momento de disparo.
4. Dispositivo según la reivindicación 1, en el que el microprocesador (3) está diseñado para indicar el estado de sistema y el resultado de calibración.
5. Dispositivo según la reivindicación 2, en el que el microprocesador (3) está configurado para guardar la mejor imagen de la secuencia de película de la detección del punto de impacto de proyectil después del disparo.
6. Dispositivo según la reivindicación 1, en el que el divisor de haz (1) comprende un componente óptico semitransparente (1) , tal como un espejo, que separa una fracción del haz de luz hacia la cámara digital (2) .
7. Dispositivo según la reivindicación 6, en el que el divisor de haz (1) puede estar apartado de la línea de mira durante un uso normal del arma.
8. Dispositivo según la reivindicación 1, en el que los servomotores (4) están equipados de engranaje de reducción apropiado (5) y proporcionan un gran par y una gran precisión, y son irreversibles para mantener la posición calibrada sin la necesidad de un control activo.
9. Dispositivo de calibración automática de retículos en cruz en una mira óptica digital para armas de fuego, cuando un tirador dispara a un blanco definido, que comprende:
una cámara digital (2) que registra tramas de imagen para el registro de la imagen de mira óptica, un microprocesador con memoria y software, una pantalla de visualización (10) para la presentación directa de las tramas de imagen registrada por la cámara digital (2) y para la presentación por software de retículos en cruz no mecánicos, en el que el microprocesador está adaptado para llevar a cabo los siguientes etapas para conseguir la calibración automática de los retículos en cruz:
almacenar la última trama de imagen registrada por la cámara digital (2) antes del disparo, determinar la posición de los retículos en cruz respecto del blanco en dicha última trama de imagen antes del disparo, identificar la posición del orificio de bala en el blanco en una trama de imagen registrada por la cámara digital (2) después del disparo, calcular el ajuste necesario para alinear los retículos en cruz (9) con el agujero de bala, y ejecutar y presentar el ajuste en la pantalla de visualización como un desplazamiento de los retículos en cruz en la pantalla de visualización.
Patentes similares o relacionadas:
Método y montaje para posicionar y alinear un disruptor para desmantelar un objetivo, del 4 de Diciembre de 2019, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Procedimiento de posicionamiento y de alineación de un disruptor destinado al desmantelamiento de un objetivo y que comprende un eje de tiro, una dirección de tiro […]
Recuperador balístico de láminas de caucho natural, del 7 de Noviembre de 2019, de BLÁZQUEZ GUERRERO, Emilio José: 1. Recuperador balístico de láminas de caucho natural caracterizado porque consta de tres partes diferenciadas: Primera - Caja de disparo: […]
 Varilla balística para fotogrametría y láser escáner, del 8 de Septiembre de 2014, de UNIVERSIDAD DE SALAMANCA: Varilla balística para laser escáner y fotogrametría.
Varilla balística para sistemas de escaneo láser y fotogramétricos en ingeniería forense que permite […]
Varilla balística para fotogrametría y láser escáner, del 8 de Septiembre de 2014, de UNIVERSIDAD DE SALAMANCA: Varilla balística para laser escáner y fotogrametría.
Varilla balística para sistemas de escaneo láser y fotogramétricos en ingeniería forense que permite […]
 Dispositivo y procedimiento para un aparato de visión, del 27 de Noviembre de 2013, de SAAB AB: Un sistema de visión para guiar un misil hacia un objetivo en movimiento , comprendiendo el sistemade visión : un generador del haz de guiado para generar […]
Dispositivo y procedimiento para un aparato de visión, del 27 de Noviembre de 2013, de SAAB AB: Un sistema de visión para guiar un misil hacia un objetivo en movimiento , comprendiendo el sistemade visión : un generador del haz de guiado para generar […]
PROCEDIMIENTO Y DISPOSITIVO PARA EVALUAR LOS ERRORES DE PUNTERIA DE UN SISTEMA DE ARMA Y USO DEL DISPOSITIVO., del 16 de Mayo de 2006, de OERLIKON CONTRAVES AG: Procedimiento para evaluar los errores de puntería de un sistema de arma que presenta - un aparato de dirección de tiro (F) para seguir un objetivo (Z), […]
DISPOSITIVOS PARA LA ARMONIZACION ENTRE UNA VIA DE EMISION LASER Y UNA VIA PASIVA DE OBSERVACION., del 1 de Julio de 2005, de THALES: Dispositivo para la armonización entre una vía de emisión de un impulso láser hacia una escena y una vía pasiva de observación de la escena, comprendiendo la vía de observación […]
PROCEDIMIENTO Y DISPOSITIVO PARA CORREGIR ERRORES DE ALINEACION ENTRE APARATOS., del 16 de Junio de 2005, de OERLIKON CONTRAVES AG: Procedimiento para corregir errores de alineación entre un dispositivo sensor (T; T1, T2) y un dispositivo efector (G; G1, G2, G3) controlado por […]
 APARATO DE VISION TELEMETRICA LASER, del 1 de Marzo de 2009, de SAGEM DEFENSE SECURITE: Aparato de visión telemétrica que comprende: - una fuente láser adecuada para emitir un haz láser de telemetría sobre un eje óptico de visión telemétrica, - una […]
APARATO DE VISION TELEMETRICA LASER, del 1 de Marzo de 2009, de SAGEM DEFENSE SECURITE: Aparato de visión telemétrica que comprende: - una fuente láser adecuada para emitir un haz láser de telemetría sobre un eje óptico de visión telemétrica, - una […]