Sistema y método para ensamblar un neumático y una rueda.
Un sistema que comprende:
una estación de trabajo de celda única (100,
200) que incluye una pluralidad de subestaciones (104a-104g, 204a-204f, 220),~
un dispositivo robótico (102, 202) que tiene un aparato (106, 212) para retener un primer componente (W, T) de unaprimera subestación en dicha pluralidad de subestaciones (104a-104g, 204a-204f, 220) y que presenta el primercomponente (W, T) a por lo menos una segunda y una tercera subestación en dicha pluralidad de subestaciones sinliberar el primer componente (W, T),
en donde por lo menos una de dicha segunda o tercera subestaciones presenta un segundo componente (W, T) adicho aparato (106, 212), y; en donde dicho aparato (106, 212) se une a dicho primer y segundo componentes (W,T),
en donde dicho primer componente incluye uno de un neumático y una rueda y en donde el segundo componente(W, T) incluye el otro del neumático (T) y la rueda (W),
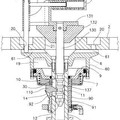
en donde la pluralidad de subestaciones incluye por lo menos una subestación que infla un neumático, caracterizadoporque la subestación que infla el neumático (204e) incluye un inflador de sello abatible (514, 536), en donde elinflador de sello abatible (514, 536) engancha un asentamiento de talón (WS1) de la rueda (W) en una primeradirección sustancialmente axial antes de inflar el neumático (T), en donde el inflador de sello abatible (514, 536)engancha el asentamiento de talón (WS1) de la rueda (W) en una segunda dirección sustancialmente axial una vezse infla el neumático (T), en donde la segunda dirección sustancialmente axial está sustancialmente opuesta a laprimera dirección sustancialmente axial.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08253216.
Solicitante: ANDROID INDUSTRIES LLC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 2155 ECECUTIVE HILLS DRIVE AUBURN HILLS, MICHIGAN 48326 ESTADOS UNIDOS DE AMERICA.
Inventor/es: LAWSON,LAWRENCE J, REECE,ROBERT, REECE,LAWRENCE L, STANDEN,RICHARD J.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60C25/132 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60C NEUMATICOS PARA VEHICULOS; INFLADO DE NEUMATICOS; CAMBIO DE NEUMATICOS; FIJACION DE VALVULAS A CUERPOS ELASTICOS INFLABLES, EN GENERAL; DISPOSITIVOS O INSTALACIONES CONCERNIENTES A LOS NEUMATICOS. › B60C 25/00 Aparatos o herramientas adaptados para el montaje, el desmontaje o el examen de neumáticos (ensayo de neumáticos G01M 17/02). › para montar y desmontar los neumáticos (únicamente para posicionar los talones sobre la llanta B60C 25/12; únicamente para despegar los talones de la llanta B60C 25/125).
PDF original: ES-2395158_T3.pdf
Fragmento de la descripción:
Sistema y método para ensamblar un neumático y una rueda Solicitud relacionada Esta solicitud reivindica el beneficio de la Solicitud de Patente Provisional Estadounidense números de serie 60/976, 964 presentada en Octubre 2, 2007 y 61/054, 988 presentada en Mayo 21, 2008. Campo de la invención La descripción se relaciona con ensambles de rueda-neumático y con un sistema y método para ensamblar un neumático y una rueda. Descripción de la técnica relacionada Se conoce en la técnica el ensamble de un neumático y una rueda en diversas etapas. Usualmente, las metodologías convencionales que conducen dichas etapas requieren una inversión significativa de capital y supervisión humana. La presente invención supera las desventajas asociadas con la técnica anterior al establecer un sistema y método simple para ensamblar un neumático y una rueda juntos.
El documento DE 102005001212 describe un aparato para ensamblar un neumático en una rueda que comprende una guía mecánica, estación de mojado, transportador y equipo de manipulación para mover una rueda desde el transportador hasta la estación de mojado antes de ensamblar el neumático en la guía mecánica. Este documento muestra todas las características del preámbulo de la reivindicación 1.
De acuerdo con un aspecto de la presente invención se proporciona un sistema que comprende: una estación de trabajo de celda única que incluye una pluralidad de subestaciones, un dispositivo robótico que tiene un aparato para retener un primer componente de una primera subestación en
dicha pluralidad de subestaciones y que presenta el primer componente a por lo menos una segunda y una tercera
subestación en dicha pluralidad de subestaciones sin liberar el primer componente, en donde por lo menos una de dicha segunda o tercera subestaciones presenta un segundo componente a dicho aparato, y;
en donde dicho aparato se une a dicho primer y segundo componentes,
en donde dicho primer componente incluye uno de un neumático y una rueda y en donde el segundo componente incluye el otro del neumático y la rueda, en donde la pluralidad de subestaciones incluye por lo menos una subestación que infla el neumático, caracterizado
porque la subestación que infla el neumático incluye un inflador de sello abatible,
en donde el inflador de sello abatible engancha un asiento de llanta de la rueda en una primera dirección sustancialmente axial antes de inflar el neumático, en donde el inflador de sello abatible engancha el asentamiento de talón de la rueda en una segunda dirección
sustancialmente axial una vez se infla el neumático,
en donde la segunda dirección sustancialmente axial está sustancialmente opuesta a la primera dirección sustancialmente axial. De acuerdo con un aspecto adicional de la presente invención se proporciona un método para ensamblar un
neumático y una rueda, que comprende las etapas de: proporcionar una estación de trabajo de celda única que incluye: un dispositivo robótico que tiene un aparato para retener un primer componente, y una pluralidad de subestaciones;
acoplar el aparato en forma liberable a una rueda en una primera subestación en dicha pluralidad de subestaciones;
mover la rueda a por lo menos una segunda y una tercera subestación en dicha pluralidad de subestaciones sin liberar la rueda del aparato, en donde la etapa de mover comprende adicionalmente las etapas de:
mover la rueda a una subestación de montaje de rueda y neumático de la pluralidad de subestaciones;
montar un neumático a la rueda;
mover la rueda a una subestación que infla un neumático de la pluralidad de subestaciones; e inflar el neumático montado en la rueda, caracterizado porque la subestación que infla el neumático incluye un inflador de sello abatible, en donde el inflador de sello abatible engancha un asentamiento de talón de la rueda en una primera dirección sustancialmente axial antes de inflar el neumático, en donde el inflador de sello abatible engancha el asentamiento de talón de la rueda en una segunda dirección sustancialmente axial una vez se infla el neumático, en donde la segunda dirección sustancialmente axial está sustancialmente opuesta a la primera dirección sustancialmente axial.
Breve descripción de los dibujos Ahora se describirá la divulgación, por vía de ejemplo, con referencia a los dibujos acompañantes, en los que:
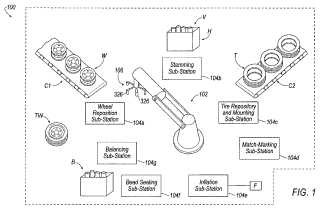
La figura 1 es una vista ambiental de una estación de trabajo de celda única para ensamblar un neumático y una rueda de acuerdo con una realización de ejemplo de la invención;
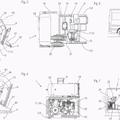
Las figuras 2A-J ilustran vistas ambientales de una estación de trabajo de celda única para ensamblar un neumático y una rueda de acuerdo con una realización de ejemplo de la invención;
La figura 3A ilustra una vista en perspectiva en explosión de una porción de mordaza de la estación de trabajo de celda única de las figuras 2A-2J de acuerdo con una realización de ejemplo de la invención;
La figura 3B ilustra una vista en perspectiva ensamblada de la porción de mordaza de la figura 3A de acuerdo con una realización de ejemplo de la invención;
Las figuras 3C-3E ilustran vistas superiores de la porción de mordaza de la figura 3B de acuerdo con una realización de ejemplo de la invención;
Las figuras 4A-4D ilustran vistas laterales de una subestación de montaje de neumático de acuerdo con una realización de ejemplo de la invención;
Las figuras 4E-4H ilustran vistas laterales de un subestación de montaje de neumático de acuerdo con una realización de ejemplo de la invención; y
Las figuras 5A-5R ilustran vistas laterales de una subestación de inflado de acuerdo con una realización de ejemplo de la invención.
Descripción detallada de la invención Las figuras ilustran una realización de ejemplo de un aparato y método para ensamblar un neumático y rueda de acuerdo con una realización de la invención. Con base en lo anterior, se entiende de manera general que la nomenclatura utilizada aquí es simplemente para conveniencia y los términos utilizados para describir la invención se les debe dar el sentido más amplio por parte del experto en la técnica.
En una realización, los sistemas mostrados en las figuras 1 y 2A-2J se pueden denominar como estaciones de trabajo de "celda única" 100, 200. En la descripción anterior, se apreciará que el término "celda única" indica que la estación de trabajo 100, 200 produce el ensamble de neumático-rueda, TW (por sus siglas en inglés) , sin requerir una pluralidad de estaciones de trabajo discretas, sucesivas que de otra forma se pueden disponer en una línea de ensamble convencional de tal manera que un ensamble de neumático-rueda parcialmente ensamblado es "transferido" a lo largo de la línea de ensamble (es decir, "transferido" significa que una línea de ensamble requiere un ensamble de neumático-rueda parcialmente ensamblado que va a ser retenido por una primera estación de trabajo de una línea de ensamble, trabajada, y liberada a una estación de trabajo posterior en la línea de ensamble para procesamiento adicional) .
Por el contrario, la estación de trabajo de celda única 100, 200 proporciona una estación de trabajo que tiene una pluralidad de sub-estaciones 104a-104g, cada una realiza una tarea específica en el proceso de ensamblar un neumático y una rueda, TW. Este proceso de ensamble tiene lugar cuando la "transferencia" del neumático y/o rueda se minimiza o elimina completamente. Como tal, la estación de trabajo de celda única novedosa 100, 200 reduce significativamente el coste e inversión asociados con la posesión/alquiler de los bienes raíces asociados con una línea de ensamble de neumático-rueda convencional que también proporciona mantenimiento para cada estación de trabajo individual que define la línea de ensamble. Sin embargo, la inversión de capital y supervisión humana se reduce significativamente cuando se emplea una estación de trabajo de celda única 100, 200 en la fabricación de ensambles de neumático-rueda, TW.
Con referencia a la figura 1, se muestra de manera general un sistema para ensamblar un neumático y una rueda, TW, 100 de acuerdo con una realización. El sistema 100 incluye un dispositivo 102. En la operación, el dispositivo recibe y retiene una rueda, W (por su inicial en inglés) , que comprende eventualmente parte de un ensamble de rueda-neumático, TW. La capacidad del dispositivo 102 para retener la rueda, W, a través de una parte de o el proceso de ensamble completo minimiza o elimina la necesidad de "transferencia" de un ensamble de neumáticorueda parcialmente ensamblado a una estación de trabajo posterior.
... [Seguir leyendo]
Reivindicaciones:
1. Un sistema que comprende:
una estación de trabajo de celda única (100, 200) que incluye una pluralidad de subestaciones (104a-104g, 204a204f, 220) ,
un dispositivo robótico (102, 202) que tiene un aparato (106, 212) para retener un primer componente (W, T) de una primera subestación en dicha pluralidad de subestaciones (104a-104g, 204a-204f, 220) y que presenta el primer componente (W, T) a por lo menos una segunda y una tercera subestación en dicha pluralidad de subestaciones sin liberar el primer componente (W, T) ,
en donde por lo menos una de dicha segunda o tercera subestaciones presenta un segundo componente (W, T) a dicho aparato (106, 212) , y; en donde dicho aparato (106, 212) se une a dicho primer y segundo componentes (W, T) ,
en donde dicho primer componente incluye uno de un neumático y una rueda y en donde el segundo componente (W, T) incluye el otro del neumático (T) y la rueda (W) ,
en donde la pluralidad de subestaciones incluye por lo menos una subestación que infla un neumático, caracterizado porque la subestación que infla el neumático (204e) incluye un inflador de sello abatible (514, 536) , en donde el inflador de sello abatible (514, 536) engancha un asentamiento de talón (WS1) de la rueda (W) en una primera dirección sustancialmente axial antes de inflar el neumático (T) , en donde el inflador de sello abatible (514, 536) engancha el asentamiento de talón (WS1) de la rueda (W) en una segunda dirección sustancialmente axial una vez se infla el neumático (T) , en donde la segunda dirección sustancialmente axial está sustancialmente opuesta a la primera dirección sustancialmente axial.
2. Un sistema de acuerdo con la reivindicación 1, que comprende adicionalmente:
un brazo robótico (202) para manipular el aparato (106, 212) , y, en donde la pluralidad de subestaciones (104a104g, 204a-204f, 220) incluye adicionalmente por lo menos dos subestaciones seleccionadas del conjunto de:
una subestación de depósito de rueda (104a, 204a) , una subestación de montaje de rueda y neumático (104c, 204d) , una subestación de lubricación (202, 204c) , y una subestación de retacado (104b) .
3. Un sistema de acuerdo con una cualquiera de las reivindicaciones precedentes, en donde la pluralidad de subestaciones (104a, 104g, 204a, 204f, 220) incluye adicionalmente por lo menos uno de:
una subestación de asentamiento de talón (104f) ; y
una subestación de finalización (204f) que incluye subestaciones de montaje-acoplado, sangrado, balanceo y marcación-acoplado (104d) .
4. Un sistema de acuerdo con una cualquiera de las reivindicaciones precedentes, en donde el aparato (106, 212) incluye:
una porción de mordaza (106, 212) , y
una parte de brazo (210) , en donde la porción de mordaza (106, 212) se conecta a la parte de brazo (210) , en donde la porción de mordaza (106, 212) se une en forma liberable a un diámetro interno (Drw) de la rueda (W) .
5. Un sistema de acuerdo con la reivindicación 4 cuando se anexa a la reivindicación 2, en donde el brazo robótico (202) comprende adicionalmente una porción base (206) y una porción de cuerpo (208) , en donde la porción de cuerpo (208) se conecta en forma pivotable a la porción base (206) , en donde la parte de brazo (210) se conecta en forma movible a la porción de cuerpo (208) , y, en donde la porción de mordaza (106, 212) se conecta en forma rotatoria a la parte de brazo (210) .
6. Un sistema de acuerdo con la reivindicación 4 o 5, en donde la porción de mordaza (106, 212) incluye:
una parte fija (302) y una parte giratoria (304) , en donde la parte giratoria (304) se dispone en forma rotatoria sobre la parte fija (302) ; las porciones de enganche de rueda (306) se disponen en forma deslizable en la parte giratoria (304) ; las porciones deslizantes (308) se disponen en forma deslizable dentro de la parte fija (302) , en donde cada porción deslizante (308) se acopla con una de cada porción de enganche de rueda (306) , y una porción de actuador
(310) se acopla a la parte giratoria (304) .
7. Un sistema de acuerdo con la reivindicación 6, en donde la parte fija (302) incluye una abertura axial central (322) , guías radiales (328) y canales radiales (312) , en donde la parte giratoria (304) incluye canales post-axiales centrales (320) y canales arqueados (316) , en donde las porciones de enganche de rueda (306) cada una incluye una porción axial (326) y una abertura (318) , en donde cada porción axial (326) se dispone en forma deslizable en una de cada una de las guías radiales (328) , en donde las porciones deslizantes (308) se disponen en forma deslizable en los canales radiales (312) , en donde las porciones deslizantes (308) cada una incluye un poste axial
(314) que se extiende a través de los canales radiales (312) , los canales arqueados (316) y la abertura (318) de cada porción de enganche de rueda (306) , en donde la porción de actuador (310) incluye un pasaje de llave (324) , en donde el poste axial central (320) se extiende a través de la abertura axial central (322) y el pasaje de llave (324) .
8. Un sistema de acuerdo con la reivindicación 6 o 7, en donde la parte giratoria (304) incluye adicionalmente una porción de acoplamiento (338) , en donde la porción de mordaza (106, 212) incluye adicionalmente:
una porción despegable (330) que se une en forma liberada a la porción de acoplamiento (338) .
9. Un sistema de acuerdo con la reivindicación 8, en donde la porción despegable (330) incluye una placa (332) , un brazo de extracción central (334) que se extiende desde la placa (332) , y una cavidad (336) formada en la placa (332) que corresponde en forma recibible a la porción de acoplamiento (338) .
10. Un sistema de acuerdo con la reivindicación 4 cuando se anexa a la reivindicación 2, en donde el brazo robótico (202) incluye adicionalmente:
un actuador de rotación (402) conectado a la parte de brazo (210) , y
un husillo (404) conectado que tiene un primer extremo y un segundo extremo, en donde el primer extremo se conecta al actuador de rotación (402) , en donde el segundo extremo se conecta a la porción de mordaza (212) .
11. Un sistema de acuerdo con la reivindicación 10, en donde el actuador de rotación (402) gira alrededor de un primer eje (A) que se extiende a través de la rueda (W) y la porción de mordaza (212) , en donde el movimiento rotacional del actuador rotacional (402) cerca al primer eje (A) se traduce en movimiento rotacional de la rueda (W) y la porción de mordaza (212) cerca al primer eje (A) .
12. Un sistema de acuerdo con la reivindicación 11, en donde la subestación de montaje de rueda y neumático (204d) incluye uno o más mecanismos de compresión de talón (406, 408) que tiene uno o más dedos de agarre de neumático (414-416.
41. 420) , en donde la subestación de montaje de rueda y neumático (204d) incluye uno o más actuadores de compresión (410, 412) acoplados con uno o más mecanismos de compresión de talón (406, 408) .
13. Un sistema de acuerdo con la reivindicación 11 o 12, en donde el primer eje (A) no es co-axial con un segundo eje (B) que se extiende a través del centro de la parte de brazo (210) y un neumático (T) , en donde se intersecta el primer eje (A) y el segundo eje (B) .
14. Un sistema de acuerdo con la reivindicación 13, en donde la intersección del primer eje (A) y el segundo eje (B) define un ángulo helicoidal (8) del método de la rueda (W) con respecto al neumático (T) en la subestación de montaje de rueda y neumático (204d) .
15. Un sistema de acuerdo con la reivindicación 13, en donde la parte de brazo (210) gira alrededor del segundo eje (B) , en donde la intersección del primer eje (A) y el segundo eje (B) define un ángulo precedente (8) del método de la rueda (W) con respecto al neumático (T) en la subestación de montaje de rueda y neumático (204d) .
16. Un método para ensamblar un neumático y una rueda, que comprende las etapas de:
proporcionar una estación de trabajo de celda única (100, 200) que incluye:
un dispositivo robótico (102, 202) que tiene un aparato (106, 212) para retener un primer componente (W, T) , y una pluralidad de subestaciones (104a-104g, 204a-204f, 220) ; acoplar el aparato en forma liberable (106, 212) a una rueda (W) en una primera subestación (104a, 204a, 104c) en dicha pluralidad de subestaciones (104a-104g, 204a204f) ;
mover la rueda (W) a por lo menos una segunda y una tercera subestación en dicha pluralidad de subestaciones (104b-104g, 204b-204f, 220) sin liberar la rueda (W) del aparato (106, 212) , en donde la etapa de mover comprende adicionalmente las etapas de:
mover la rueda (W) a una subestación de montaje de rueda y neumático (204d) de la pluralidad de subestaciones (204a-204f) ;
montar un neumático (T) a la rueda (W) ;
mover la rueda (W) en una subestación que infla un neumático (104e, 204e) de la pluralidad de subestaciones (104a-104g; 204a-204f) ; e inflar el neumático (T) montado en la rueda (W) , caracterizado porque la subestación que infla el neumático (204e) incluye un inflador de sello abatible (514, 536) , en donde el inflador de sello abatible (514, 536) engancha un asentamiento de talón (WS1) de la rueda (W) en una primera dirección sustancialmente axial antes de inflar el neumático (T) , en donde el inflador de sello abatible (514, 536) engancha el asentamiento de talón (WS1) de la rueda (W) en una segunda dirección sustancialmente axial una vez se infla el neumático (T) , en donde la segunda dirección sustancialmente axial está sustancialmente opuesta a la primera dirección sustancialmente axial.
17. El método de acuerdo con la reivindicación 16, en donde el acoplamiento del aparato en forma liberable (106, 212) a la rueda incluye las etapas de:
mover un brazo (210) del dispositivo robótico (102, 202) próximo a la rueda (W) ;
posicionar una porción de mordaza (212) del aparato (106, 212) conectada al brazo (210) próximo a un diámetro interno (DIW) de la rueda (W) ; y que engancha el diámetro interno (DIW) de la rueda (W) con la porción de mordaza (212) .
18. El método de acuerdo con la reivindicación 16 o 17, en donde la etapa de montaje comprende adicionalmente:
hacer girar la rueda (W) y la porción de mordaza (212) cerca a un primer eje (A) .
19. El método de acuerdo con la reivindicación 18, en donde el primer eje (A) no es co-axial con un segundo eje
(B) que se extiende a través del centro del brazo (210) y el neumático (T) , en donde se intersecta el primer eje (A) y el segundo eje (B) .
20. El método de acuerdo con la reivindicación 19, en donde la etapa de montaje comprende adicionalmente las etapas de:
insertar la rueda (W) en el neumático (T) ; y
proporcionar un ángulo helicoidal (8) del método de la rueda (W) con respecto al neumático (T) al evitar que el primer eje (A) gire alrededor del segundo eje (B) en la intersección del primer y segundo ejes (A, B) .
21. El método de acuerdo con la reivindicación 19, en donde la etapa de montaje comprende adicionalmente las etapas de:
insertar la rueda (W) en el neumático (T) ; y
proporcionar un ángulo precedente (8) del método de la rueda (W) con respecto al neumático (T) al hacer girar el primer eje (A) alrededor del segundo eje (B) en el punto de intersección del primer y segundo ejes (A, B) .
22. El método de acuerdo con una cualquiera de las reivindicaciones 16 a 21, en donde la etapa de mover comprende adicionalmente la etapa de:
23. El método de acuerdo con una cualquiera de las reivindicaciones 16 a 22, en donde antes de la etapa de inflar, la etapa de mover la rueda (W) en la subestación que infla el neumático (104e, 204e) comprende adicionalmente las etapas de:
mover la rueda (W) a una subestación de lubricación (204c) de la pluralidad de subestaciones (204a-204f) antes de la etapa de mover la rueda (W) en la subestación de montaje de rueda y neumático (204d) ; y
lubricar por lo menos una parte de la rueda (W) .
soportar axialmente la rueda (W) con una porción despegable (330) que se conecta en forma liberable a una porción 5 de mordaza (212) del aparato (106, 212) ;
asegurar radialmente la porción despegable (330) con la subestación que infla el neumático (104e, 204e) ; y
desconectar axialmente la porción despegable (330) de la porción de mordaza (212) .
24. El método de acuerdo con la reivindicación 23, en donde, después que se realiza la etapa de inflado, comprende adicionalmente las etapas de: 10 conectar axialmente la porción de mordaza (212) y la porción despegable (330) ;
no asegurar radialmente la porción despegable (330) de la subestación que infla el neumático (104e, 204e) ; sujetar radialmente el neumático inflado y el ensamble de rueda con un dispositivo de enganche de rodadura de llanta con el neumático (560) ; y
mover axialmente la porción de mordaza (212) y la parte de brazo (210) lejos de la subestación de neumático (104e, 15 204e) .
Patentes similares o relacionadas:
Aparato para montar y desmontar un neumático, del 10 de Julio de 2019, de NEXION S.p.A: Un aparato para montar y desmontar un neumático que se apoya operativamente sobre una superficie (S) de soporte, que comprende: - una […]
Sistema y método de procesamiento de montaje de neumático-rueda, del 8 de Marzo de 2017, de ANDROID INDUSTRIES LLC: Un método de procesamiento de un neumático (T) y una rueda (W) para la formación de un montaje de neumático - rueda (TW), que comprende las etapas de: colocar […]
Estación de trabajo de inflado, del 18 de Enero de 2017, de ANDROID INDUSTRIES LLC: Una estación de trabajo de inflado para inflar un conjunto (TW) de neumático-rueda que incluye un neumático (T) montado en una rueda (W), […]
Sistema y método de procesamiento de montaje de neumático-rueda, del 7 de Diciembre de 2016, de ANDROID INDUSTRIES LLC: Un aparato de procesamiento de un neumático (T) y una rueda (W) para la formación de un montaje de neumático - rueda (TW), que comprende: un miembro […]
 Dispositivo embarcado de montaje/desmontaje de neumáticos de vehículos del tipo pesado, del 16 de Marzo de 2016, de Guernet Compresseurs: Dispositivo de montaje/desmontaje de neumáticos de vehículos, especialmente del tipo pesado, embarcado en un vehículo utilitario ligero , comprendiendo […]
Dispositivo embarcado de montaje/desmontaje de neumáticos de vehículos del tipo pesado, del 16 de Marzo de 2016, de Guernet Compresseurs: Dispositivo de montaje/desmontaje de neumáticos de vehículos, especialmente del tipo pesado, embarcado en un vehículo utilitario ligero , comprendiendo […]
 Dispositivo de enclavamiento de llanta de rueda para máquinas de desmontaje de neumáticos, del 18 de Marzo de 2015, de CORGHI S.P.A.: Dispositivo para el enclavamiento de llantas de rueda para máquinas de desmontaje de neumáticos que comprende, para soportar la llanta de rueda , una placa superior […]
Dispositivo de enclavamiento de llanta de rueda para máquinas de desmontaje de neumáticos, del 18 de Marzo de 2015, de CORGHI S.P.A.: Dispositivo para el enclavamiento de llantas de rueda para máquinas de desmontaje de neumáticos que comprende, para soportar la llanta de rueda , una placa superior […]
ÚTIL DESMONTADOR DE NEUMÁTICOS, del 10 de Marzo de 2015, de MARTINEZ CAMPOS,JESUS MARIA: 1. Útil desmontador de neumáticos, el cual es del tipo de útiles desmontadores de neumáticos constituidos por una barra longitudinal metálica que en, al menos, […]
Dispositivo y procedimiento de montaje de un neumático con la ayuda de un robot, del 7 de Mayo de 2014, de SCHENCK ROTEC GMBH: Procedimiento para el montaje de un neumático sobre una llanta de base honda de una rueda de vehículo, en el que el neumático (R) es agarrado […]