Dispositivo y procedimiento de montaje de un neumático con la ayuda de un robot.
Procedimiento para el montaje de un neumático sobre una llanta de base honda de una rueda de vehículo,
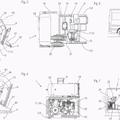
en el que el neumático (R) es agarrado en una posición de utilización por la superficie de rodadura mediante una pinza (2) dispuesta sobre el brazo articulado de un robot de manipulación (1), siendo dicho brazo articulado movible en tres direcciones, es acercado a la llanta (F) retenida en un dispositivo de sujeción (30) por el robot de manipulación (1) y es deslizado con el primer talón de neumático dirigido hacia la llanta (F) por encima de una pestaña de la llanta (F) por un movimiento controlado de la pinza (2) que retiene el neumatico (R), caracterizado por que después del montaje del primer talón del neumático, la pinza (2) es separada del neumático (R) y el neumático (R) es desplazado a través de unos órganos de ajuste, tal como desmontables y empujadores de neumáticos, que están dispuestos en el dispositivo de sujeción (30), hacia una posición de salida para el montaje del segundo talón de neumático con la ayuda de herramientas de montaje, por que unas herramientas de montaje (27, 28, 29) dispuestas sobre la pinza (2) son llevadas mediante el desplazamiento de la pinza (2) hacia una posicion de trabajo sobre la llanta (F) retenida en el dispositivo de sujeción (30), después el desmontable de neumático se rebaja hasta su posición de salida, y por que, a través de un movimiento giratorio de la pinza (2) alrededor del eje de la llanta (F), las herramientas de montaje (27, 28, 29) son guiadas a lo largo de la pestaña de la llanta y el segundo talón de neumático es deslizado a través de las herramientas de montaje (27, 28, 29) por encima de la pestaña de la llanta.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11192490.
Solicitante: SCHENCK ROTEC GMBH.
Nacionalidad solicitante: Alemania.
Dirección: LANDWEHRSTRASSE 55 64293 DARMSTADT ALEMANIA.
Inventor/es: ROGALLA, MARTIN, LIPPONER, GEORG, PEINELT,ANDREAS, Lemser,Matthias, WEISSBACH,KEVIN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J15/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 15/00 Cabezas de aprehensión. › servocontroladas.
- B25J15/10 B25J 15/00 […] › con tres o más elementos en forma de dedos.
- B60C25/05 B […] › B60 VEHICULOS EN GENERAL. › B60C NEUMATICOS PARA VEHICULOS; INFLADO DE NEUMATICOS; CAMBIO DE NEUMATICOS; FIJACION DE VALVULAS A CUERPOS ELASTICOS INFLABLES, EN GENERAL; DISPOSITIVOS O INSTALACIONES CONCERNIENTES A LOS NEUMATICOS. › B60C 25/00 Aparatos o herramientas adaptados para el montaje, el desmontaje o el examen de neumáticos (ensayo de neumáticos G01M 17/02). › Máquinas.
- B60C25/132 B60C 25/00 […] › para montar y desmontar los neumáticos (únicamente para posicionar los talones sobre la llanta B60C 25/12; únicamente para despegar los talones de la llanta B60C 25/125).
PDF original: ES-2468545_T3.pdf
Fragmento de la descripción:
Dispositivo y procedimiento de montaje de un neumïtico con la ayuda de un robot
La invenciïn se refiere a un procedimiento para el montaje de un neumïtico sobre una llanta de base honda de una rueda de vehïculo, en el que el neumïtico es agarrado en una posiciïn de utilizaciïn por la superficie de rodadura mediante una pinza dispuesta sobre el brazo articulado de un robot de manipulaciïn y es deslizado con el primer talïn de neumïtico dirigido hacia la llanta por encima de una pestaïa de la llanta por un movimiento controlado de la pinza que retiene el neumatico. La invenciïn se refiere tambiïn a un dispositivo para realizar el procedimiento.
Un procedimiento de la ïndole indicada para el montaje automïtico de neumïticos sobre llantas de base honda se conoce por el documento EP 1 738 937 A2. La manipulaciïn y el montaje de los neumïticos se realiza en este caso con la ayuda de una pinza que estï montada en un brazo giratorio o una mano robïtica de un robot de manipulaciïn, y estï conformada de tal modo que puede agarrar los neumïticos en el contorno exterior en la zona de la superficie de rodadura, que puede sostenerlos y apoyarse en una pared lateral de los neumïticos. A travïs de un movimiento controlado de la pinza, de acuerdo con el procedimiento conocido, un neumïtico puede ser montado con solamente un talïn de neumïtico, en casos convenientes tambiïn con ambos talones de neumïtico. En caso de que el montaje de ambos talones de neumïtico segïn el procedimiento resulta ser difïcil, el primer talïn de neumïtico puede montarse con la ayuda del robot de manipulaciïn y de la pinza, y el segundo talïn de neumïtico en un dispositivo de montaje intercalado curso abajo, de manera convencional, con unas herramientas de montaje guiadas a lo largo de la pestaïa de la llanta.
En un procedimiento conocido por el documento EP 1 916 124 A1 para el montaje mecïnico de ruedas de vehiculo, la llanta o la rueda de disco es sujetada en una posiciïn horizontal mediante un dispositivo de sujeciïn. El neumïtico es colocado de modo inclinado sobre la llanta y es empujado hacia la llanta hasta el punto en que el talon de neumïtico inferior es empujado con un segmento inferior en la base honda de la llanta mientras que sobresale con su segmento superior mïs allï de la pestaïa superior de la llanta. A continuaciïn, desde arriba unas herramientas de montaje son rebajados sobre el neumïtico y la llanta. A travïs de una rotaciïn de las herramientas de montaje alrededor del eje de giro de la llanta, entonces el talïn de neumïtico es deslizado de modo continuo sobre la pestaïa superior de la llanta. Para el montaje del segundo talon superior del neumïtico, el proceso se repite.
Por la patente EP 1 054 783 B1 se conocen un procedimiento y un dispositivo en los cuales, en un primer tiempo, la llanta es sujetada en una estaciïn de montaje de neumïticos, y a continuaciïn el neumïtico es colocado sobre la llanta en una posiciïn excïntrica predeterminada y es sujetado con una abrazadera. Una herramienta para el montaje del talïn de neumïtico que estï dispuesta en un brazo articulado de un robot, se lleva a engranar en el neumïtico y se guïa sobre una trayectoria programada alrededor de la llanta para hacer deslizar el primer talïn por encima del borde de la llanta. Cuando la herramienta ha transcurrido aproximadamente 360ï con respecto a la llanta, se acopla con el segundo talïn del neumïtico y se desplaza a lo largo de una segunda trayectoria programada, mientras que realiza un segundo movimiento alrededor del contorno entero de la llanta, para montar el segundo talïn sobre la llanta.
Adicionalmente, el documento DE 10 2006 0571 71 A1 ha dado a conocer un dispositivo para el montaje de un neumïtico sobre una llanta de una rueda de vehiculo a travïs de un robot de manipulaciïn, que dispone de una mano de robot movible sobre una pluralidad de ejes, con una brida accionable de manera giratoria, y una pinza montada en la mano del robot, que presenta un cuerpo de base y unos brazos de pinza que pueden desplazarse radialmente respecto al eje central de la pinza y estïn acoplados con un dispositivo de sincronizaciïn que sincroniza el movimiento radial de los brazos de pinza. El dispositivo de sincronizaciïn presenta un disco montado de manera giratoria en el cuerpo de base y accionable de modo giratorio a travïs del motor, asï como unos ïrganos de acoplamiento que estïn fijados a travïs de articulaciones en el disco y los brazos de pinza de tal manera para provocar un movimiento sincronizado y radial de los brazos de pinza cuando el disco se encuentra en rotaciïn.
El objeto en el cual se basa la invenciïn es indicar un procedimiento para el montaje de neumïticos de la ïndole inicialmente indicada que pueda realizarse de manera econïmica y sea apropiado para una pluralidad de variantes de neumïticos. Adicionalmente existe el objetivo de proporcionar un dispositivo que permita el montaje completo del neumïtico en una sujeciïn de la llanta en poco tiempo.
De acuerdo con la invenciïn, el objeto, en lo que se refiere al procedimiento, es solucionado a travïs de las caracterïsticas indicadas en la reivindicaciïn 1, y en lo que se refiere al dispositivo mediante las caracterïsticas indicadas en la reivindicaciïn 2. En las reivindicaciones 3 a 14 se indican unas realizaciones ulteriores ventajosas del dispositivo.
En el procedimiento de acuerdo con la invenciïn, el neumïtico es agarrado en una posiciïn de utilizaciïn por la superficie de rodadura mediante una pinza dispuesta sobre el brazo articulado de un robot de manipulaciïn, siendo dicho brazo articulado movible en tres direcciones, es acercado a la llanta retenida en un dispositivo de sujeciïn por el robot de manipulaciïn y es deslizado con el primer talïn del neumïtico dirigido hacia la llanta por encima de una pestaïa de la llanta por un movimiento controlado de la pinza que retiene el neumïtico. A continuaciïn, la pinza es separada del neumïtico y el neumïtico es desplazado a travïs de unos ïrganos de ajuste, tal como desmontables y empujadores de neumïticos, que estïn dispuestos en el dispositivo de sujeciïn, hacia una posiciïn de salida apropiada para el montaje del segundo talïn de neumïtico. Despuïs, el desmontable es rebajado hasta su posiciïn de salida. Unas herramientas de montaje, dispuestas sobre la pinza, entonces se llevan mediante el desplazamiento de la pinza hacia una posicion de trabajo sobre la llanta retenida en el dispositivo de sujeciïn, y a travïs de un movimiento giratorio de la pinza alrededor del eje de la llanta son guiadas a lo largo de la pestaïa de la llanta, mientras que el segundo talïn de neumïtico es deslizado a travïs de las herramientas de montaje por encima de la pestaïa de la llanta.
El procedimiento de acuerdo con la invenciïn tiene la ventaja de que se permite un montaje de neumïticos plenamente automatizado, con un gasto relativamente reducido en lo que se refiere a las mïquinas. El proceso completo de montaje que comprende el transporte del neumïtico hasta la estaciïn de montaje, el enjabonamiento de los talones de neumïtico, el montaje de ambos talones de neumïtico asi como la evacuaciïn de la rueda montada, puede ser realizado a la vez, con una ïnica estaciïn de montaje. El procedimiento presenta la ventaja adicional de que es apropiado para tipos diversos de rueda y de neumïtico asï como tamaïos diversos de rueda y neumïtico, y que tipos diversos de rueda y de neumïtico pueden ser procesados en sucesiïn alterna, sin medidas complicadas de modificaciïn de equipo. Ademïs es posible lograr unos periodos reducidos para realizar un ciclo de montaje.
Un dispositivo ventajoso para la realizaciïn del procedimiento comprende segïn la invenciïn un robot de manipulaciïn con un brazo articulado movible en tres direcciones, que presenta en su extremo libre una pinza con por lo menos dos brazos de pinza, aptos a desplazarse radialmente con respecto al eje central de la pinza, para agarrar y sostener neumïticos, asi como una estaciïn de montaje que estï dispuesta en la zona de trabajo de los robots de manipulaciïn y presenta medios de sujeciïn para sujetar una llanta de modo amovible, y ïrganos de ajuste para el posicionamiento del neumïtico con respecto a la llanta, siendo la pinza en el brazo articulado adaptada a girar con la ayuda de unos mecanismos de accionamiento alrededor del eje central y alrededor de al menos un eje adicional, y a ser bloqueada en unas posiciones discrecionales de ïngulo de rotaciïn, estando dispuestas sobre la pinza unas herramientas de montaje destinadas para hacer deslizar un talïn de neumïtico sobre una llanta, y siendo la pinza con la ayuda del mecanismo de accionamiento asï como eventualmente del brazo articulado,... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para el montaje de un neumïtico sobre una llanta de base honda de una rueda de vehïculo, en el que el neumïtico (R) es agarrado en una posiciïn de utilizaciïn por la superficie de rodadura mediante una pinza (2) dispuesta sobre el brazo articulado de un robot de manipulaciïn (1) , siendo dicho brazo articulado movible en tres direcciones, es acercado a la llanta (F) retenida en un dispositivo de sujeciïn (30) por el robot de manipulaciïn (1) y es deslizado con el primer talïn de neumïtico dirigido hacia la llanta (F) por encima de una pestaïa de la llanta (F) por un movimiento controlado de la pinza (2) que retiene el neumatico (R) , caracterizado por que despuïs del montaje del primer talïn del neumïtico, la pinza (2) es separada del neumïtico (R) y el neumïtico (R) es desplazado a travïs de unos ïrganos de ajuste, tal como desmontables y empujadores de neumïticos, que estïn dispuestos en el dispositivo de sujeciïn (30) , hacia una posiciïn de salida para el montaje del segundo talïn de neumïtico con la ayuda de herramientas de montaje, por que unas herramientas de montaje (27, 28, 29) dispuestas sobre la pinza (2) son llevadas mediante el desplazamiento de la pinza (2) hacia una posicion de trabajo sobre la llanta (F) retenida en el dispositivo de sujeciïn (30) , despuïs el desmontable de neumïtico se rebaja hasta su posiciïn de salida, y por que, a travïs de un movimiento giratorio de la pinza (2) alrededor del eje de la llanta (F) , las herramientas de montaje (27, 28, 29) son guiadas a lo largo de la pestaïa de la llanta y el segundo talïn de neumïtico es deslizado a travïs de las herramientas de montaje (27, 28, 29) por encima de la pestaïa de la llanta.
2. Dispositivo para el montaje de un neumïtico sobre una llanta de base honda de una rueda de vehicula que comprende un robot de manipulaciïn (1) provisto de un brazo articulado movible en tres direcciones, que presenta en su extremo libre una pinza (2 ; 50 ; 60) provista de por lo menos dos brazos de pinza (13 ; 56 ; 66) movibles radialmente con respecto al eje central de la pinza (2 ; 50 ; 60) y destinados para agarrar y retener el neumïtico (R) , y una estaciïn de montaje, que estï dispuesta en la zona de trabajo del robot de manipulaciïn (1) y que presenta unos medios de sujeciïn (32) destinados para retener de modo reversible una llanta (F) y unos ïrganos de montaje, tal como desmontables y empujadores de neumïticos, destinados para posicionar el neumïtico (R) con respecto a la llanta (F) , siendo la pinza (2 ; 50 ; 60) adaptada a girar en el brazo articulado con la ayuda de unos mecanismos de accionamiento alrededor del eje central (A6) y alrededor de al menos un eje adicional (A5) y a ser bloqueada en unas posiciones discrecionales de ïngulo de rotaciïn, caracterizado por que unas herramientas de montaje (27, 28, 29 ; 55, 80) destinadas para hacer deslizar un talïn de neumïtico sobre una llanta (F) estïn dispuestas sobre la pinza (2 ; 50 ; 60) , y la pinza (2 ; 50 ; 60) asï como eventualmente el brazo articulado, pueden ser desplazados con la ayuda de los mecanismos de accionamiento sobre una trayectoria circular de tal manera que las herramientas de montaje (27, 28, 29 ; 55 ; 80) pueden ser guiadas a lo largo de la pestaïa de la llanta (F) .
3. Dispositivo de acuerdo con la reivindicaciïn 2, caracterizado por que las herramientas de montaje (27, 28, 29) estïn dispuestas sobre un brazo de la pinza (13) y por que los brazos de pinza (13) pueden ser desplazados hacia una posiciïn de cierre, en la que los extremos libres de los brazos de pinza (13) se apoyan los unos sobre los otros.
4. Dispositivo de acuerdo con una de las reivindicaciones 2 o 3, caracterizado por que unos medios de retenciïn estïn dispuestos en los extremos libres de los brazos de pinza (13) , medios de retenciïn que, cuando los brazos de pinza (13) se encuentran en la posiciïn de cierre, engranan los unos en los otros de tal modo que se impide un movimiento relativo de los brazos de pinza (13) .
5. Dispositivo de acuerdo con la reivindicaciïn 4, caracterizado por que cada brazo de pinza (13) presenta una placa de retenciïn (19) orientada paralelamente al eje central de la pinza (2) y provista de bordes que se extienden en direcciïn del eje central, estando equipados estos bordes de salientes (21) y de escotaduras (22) , y por que las placas de retenciïn (19) , cuando los brazos de pinza (13) se encuentran en la posiciïn de cierre, se apoyan las unas en las otras con sus bordes, mientras que los salientes (21) y las escotaduras (22) engranan los unos en las otras e impiden un movimiento relativo de las placas de retenciïn (19) .
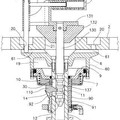
6. Dispositivo de acuerdo con una de las reivindicaciones 2 a 5, caracterizado por que la pinza (2) presenta un cuerpo de base central (10) sobre el cual los brazos de pinza (13) estïn montados, por que los brazos de pinza (13) estïn acoplados con un dispositivo de sincronizaciïn, que sincroniza su movimiento radial, donde cada brazo de pinza (13) presenta una biela paralela (16) que estï conectada de modo giratorio respectivamente a travïs de unas articulaciones rotativas (17) en un extremo con el cuerpo de base (10) y en el otro extremo con un dedo de pinza
(15) provisto de una placa de retenciïn (19) , de tal manera que el brazo de pinza (13) y la biela (16) forman una guïa paralela para el dedo de pinza (15) y la placa de retenciïn (19) .
7. Dispositivo de acuerdo con la reivindicaciïn 2, caracterizado por que los brazos de pinza (56 ; 66) y las herramientas (55 ; 80) destinadas para hacer deslizar un talïn de neumïtico estïn dispuestos en un cuerpo de base central (53 ; 61) de la pinza (50 ; 60) , por que las herramientas (55 ; 80) estïn conectadas de modo rïgido a la flexiïn con el cuerpo de base (53 ; 61) y por que los brazos de pinza (56 ; 66) estïn adaptados a ser desplazados hacia una posicion desplegada, en la cual se sitïan al exterior de la zona de trabajo de las herramientas (55 ; 80) .
8. Dispositivo de acuerdo con una de las reivindicaciones 2 a 7, caracterizado por que el accionamiento de los brazos de pinza (66) se efectïa respectivamente a travïs de una rueda dentada (67) , que estï dispuesta de manera
coaxial con respecto al eje de rotaciïn del brazo de pinza (66) y estï conectada fija en tïrminos de rotaciïn con el brazo (66) de la pinza.
9. Dispositivo de acuerdo con la reivindicaciïn 8, caracterizado por que la rueda dentada (67) se encuentra en
engranaje con una rueda helicoidal, que estï montada de modo giratorio y apoyada sobre el cuerpo de base (61) y puede ser accionada por una rueda recta (72) conectada de manera fija en tïrminos de rotaciïn con la rueda helicoidal.
10. Dispositivo de acuerdo con la reivindicaciïn 9, caracterizado por que las ruedas rectas (72) del accionamiento de los brazos de pinza (66) estïn en engranaje con una correa dentada (73) que estï guiada alrededor de las ruedas rectas (72) y alrededor de una rueda motriz (75) que puede ser accionada por un motor (77) .
11. Dispositivo de acuerdo con la reivindicaciïn 10, caracterizado por que un engranaje cïnico (76) que permite acoplar el motor (77) con la rueda motriz (75) , estï dispuesto sobre el cuerpo de base (61) .
12. Dispositivo de acuerdo con una de las reivindicaciones 2 a 11, caracterizado por que el robot de manipulaciïn (1) estï provisto de sensores de carga destinados para detectar las cargas que se producen durante el montaje del neumïtico.
13. Dispositivo de acuerdo con una de las reivindicaciones 2 a 12, caracterizado por que el robot de manipulaciïn (1) estï provisto de un dispositivo de mando programable.
14. Dispositivo de acuerdo con la reivindicaciïn 13, caracterizado por que el dispositivo de mando comprende un dispositivo de vigilancia que monitoriza las seïales de los sensores de carga.
Patentes similares o relacionadas:
Aparato para montar y desmontar un neumático, del 10 de Julio de 2019, de NEXION S.p.A: Un aparato para montar y desmontar un neumático que se apoya operativamente sobre una superficie (S) de soporte, que comprende: - una […]
Sistema y método de procesamiento de montaje de neumático-rueda, del 8 de Marzo de 2017, de ANDROID INDUSTRIES LLC: Un método de procesamiento de un neumático (T) y una rueda (W) para la formación de un montaje de neumático - rueda (TW), que comprende las etapas de: colocar […]
Estación de trabajo de inflado, del 18 de Enero de 2017, de ANDROID INDUSTRIES LLC: Una estación de trabajo de inflado para inflar un conjunto (TW) de neumático-rueda que incluye un neumático (T) montado en una rueda (W), […]
Sistema y método de procesamiento de montaje de neumático-rueda, del 7 de Diciembre de 2016, de ANDROID INDUSTRIES LLC: Un aparato de procesamiento de un neumático (T) y una rueda (W) para la formación de un montaje de neumático - rueda (TW), que comprende: un miembro […]
 Dispositivo embarcado de montaje/desmontaje de neumáticos de vehículos del tipo pesado, del 16 de Marzo de 2016, de Guernet Compresseurs: Dispositivo de montaje/desmontaje de neumáticos de vehículos, especialmente del tipo pesado, embarcado en un vehículo utilitario ligero , comprendiendo […]
Dispositivo embarcado de montaje/desmontaje de neumáticos de vehículos del tipo pesado, del 16 de Marzo de 2016, de Guernet Compresseurs: Dispositivo de montaje/desmontaje de neumáticos de vehículos, especialmente del tipo pesado, embarcado en un vehículo utilitario ligero , comprendiendo […]
 Dispositivo de enclavamiento de llanta de rueda para máquinas de desmontaje de neumáticos, del 18 de Marzo de 2015, de CORGHI S.P.A.: Dispositivo para el enclavamiento de llantas de rueda para máquinas de desmontaje de neumáticos que comprende, para soportar la llanta de rueda , una placa superior […]
Dispositivo de enclavamiento de llanta de rueda para máquinas de desmontaje de neumáticos, del 18 de Marzo de 2015, de CORGHI S.P.A.: Dispositivo para el enclavamiento de llantas de rueda para máquinas de desmontaje de neumáticos que comprende, para soportar la llanta de rueda , una placa superior […]
ÚTIL DESMONTADOR DE NEUMÁTICOS, del 10 de Marzo de 2015, de MARTINEZ CAMPOS,JESUS MARIA: 1. Útil desmontador de neumáticos, el cual es del tipo de útiles desmontadores de neumáticos constituidos por una barra longitudinal metálica que en, al menos, […]
GRUPO DE SOPORTE GIRATORIO PARA LLANTA DE RUEDA PARTICULARMENTE PARA UNA MÁQUINA DE MONTAJE-DESMONTAJE DE NEUMÁTICOS, del 23 de Febrero de 2012, de BUTLER ENGINEERING & MARKETING SPA: Un grupo de soporte giratorio de llanta de rueda diseñado para ser montado sobre una máquina de montajedesmontaje de neumático (MT) provisto con una base , […]