Estación robótica de indexación.
Una estación de trabajo de única celda (10) para procesar un conjunto de neumático y rueda (TW) que incluye unneumático (T) y una llanta (W),
caracterizada porque comprende:
una subestación de montaje e indexación (16, 106) que permite posicionar el neumático luego; y
un brazo robótico (52) configurado para interconectarse con la llanta del conjunto de neumático y rueda, el brazorobótico que se configura adicionalmente para:
disponer la llanta dentro de una abertura central definida por el neumático, y
compensar un punto de equilibrio pesado (THP) del neumático y un punto de equilibrio pesado (WHP) de la llanta.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2009/056021.
Solicitante: ANDROID INDUSTRIES LLC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 2155 Executive Hills Drive Auburn Hills, MI 48326-2943 ESTADOS UNIDOS DE AMERICA.
Inventor/es: LAWSON,LAWRENCE J.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60C25/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60C NEUMATICOS PARA VEHICULOS; INFLADO DE NEUMATICOS; CAMBIO DE NEUMATICOS; FIJACION DE VALVULAS A CUERPOS ELASTICOS INFLABLES, EN GENERAL; DISPOSITIVOS O INSTALACIONES CONCERNIENTES A LOS NEUMATICOS. › Aparatos o herramientas adaptados para el montaje, el desmontaje o el examen de neumáticos (ensayo de neumáticos G01M 17/02).
- B60C25/132 B60C […] › B60C 25/00 Aparatos o herramientas adaptados para el montaje, el desmontaje o el examen de neumáticos (ensayo de neumáticos G01M 17/02). › para montar y desmontar los neumáticos (únicamente para posicionar los talones sobre la llanta B60C 25/12; únicamente para despegar los talones de la llanta B60C 25/125).
PDF original: ES-2442950_T3.pdf
Fragmento de la descripción:
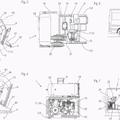
Estación robótica de indexación Campo de la Invención La descripción se relaciona con conjuntos de neumático y rueda y con un método y aparato para procesar un conjunto de neumático y rueda. Descripción de la Técnica Relacionada Se sabe en la técnica que un conjunto de neumático y rueda se procesa en diversas etapas. Usualmente, las metodologías convencionales que conducen dichas etapas requieren vigilancia humana e inversión de capital significativas. Ejemplos de dichas metodologías se describen en los documentos EP1564028A1, US5826319A, 10 GB2104460A y EP1942019A1. La presente invención supera los inconvenientes asociados con la técnica anterior al establecer un dispositivo utilizado para procesar un conjunto de neumático y rueda. Breve Descripción de los Dibujos Se describirá ahora la divulgación, por vía de ejemplo, con referencia a los dibujos acompañantes, en los que: Las Figuras 1-4 ilustran vistas en perspectiva de un aparato y método para procesar un conjunto de neumático y
rueda de acuerdo con una realización de ejemplo de la invención. Las Figuras 5-7 ilustran una subestación del método y aparato de acuerdo con la línea 5 de la Figura 4 de acuerdo con una realización de ejemplo de la invención;
Las Figuras 8 y 9 ilustran una vista superior de un neumático y llanta así como también una vista parcial desde arriba de la subestación de las Figuras 1-7 de acuerdo con una realización de ejemplo de la invención; 20 La Figura 10 ilustra la subestación del método y aparato de acuerdo con las Figuras 1-9 de acuerdo con una realización de ejemplo de la invención;
La Figura 11 ilustra una vista de una subestación de montaje e indexación y un brazo robótico de acuerdo con una realización de ejemplo de la invención;
Las Figuras 12A-12C ilustran realizaciones de una muesca de la subestación de montaje e indexación de la Figura
de acuerdo con una realización de ejemplo de la invención; La Figura 13 ilustra otra vista de una subestación de montaje e indexación y un brazo robótico de acuerdo con una realización de ejemplo de la invención;
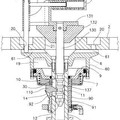
La Figura 14 ilustra una vista en sección transversal parcial de la subestación de montaje e indexación y un neumático adherido al brazo robótico de acuerdo con una realización de ejemplo de la invención; 30 La Figura 15 ilustra otra vista en sección transversal parcial de la subestación de montaje e indexación y un neumático adherido al brazo robótico de acuerdo con una realización de ejemplo de la invención;
La Figura 16 ilustra una vista en sección transversal de una porción del brazo robótico y una vista superior del neumático y una llanta de acuerdo con una realización de ejemplo de la invención;
La Figura 17 ilustra otra vista en sección transversal parcial de la subestación de montaje e indexación y un
neumático adherido al brazo robótico de acuerdo con una realización de ejemplo de la invención; La Figura 18 ilustra otra vista en sección transversal de una porción del brazo robótico y una vista superior del neumático y una llanta de acuerdo con una realización de ejemplo de la invención;
La Figura 19 ilustra otra vista en sección transversal parcial de la subestación de montaje e indexación y un neumático adherido al brazo robótico de acuerdo con una realización de ejemplo de la invención; y 40 La Figura 20 ilustra otra vista en sección transversal de una porción del brazo robótico y una vista superior del neumático y una llanta de acuerdo con una realización de ejemplo de la invención.
Descripción Detallada de la Invención Las Figuras ilustran una realización de ejemplo de un aparato y método para procesar un conjunto de neumático y rueda de acuerdo con una realización de la invención. Con base en lo anterior, de manera general se debe entender que la nomenclatura utilizada aquí es simplemente para conveniencia y a los términos utilizados describir la invención se les debe dar el significado más amplio por parte de una persona medianamente experta en la técnica.
En una realización, un aparato mostrado generalmente en 10 en las Figuras 1-4 se puede denominar como una estación de trabajo de “única celda”. En la descripción anterior, se apreciará que el término “única celda” indica que la estación de trabajo 10 proporciona un conjunto de neumático y rueda, TW (por sus siglas en inglés) , sin requerir una pluralidad de estaciones de trabajo sucesivas, discretas que de otra forma se pueden disponer en una línea de montaje convencional. Por el contrario, la estación de trabajo de única celda 10 proporciona una estación de trabajo que tiene una pluralidad de subestaciones 12-18, cada una desarrolla una tarea específica en el procesamiento de un conjunto de neumático y rueda, TW. Como tal, la estación de trabajo de única celda novedosa 10 reduce de forma significativa el costo, inversión y mantenimiento asociados con una línea de conjunto de neumático y rueda ubicada en un espacio de propiedad raíz relativamente grande. Así, la inversión de capital y supervisión humana se reduce significativamente cuando se emplea una estación de trabajo de única celda 10 en el procesamiento de conjuntos de neumático y rueda, TW.
En una realización, la estación de trabajo de única celda 10 incluye un dispositivo 50. En operación, el dispositivo 50 interactúa con una llanta, W, con el fin de preparar un conjunto de neumático y rueda, TW. La capacidad del dispositivo 50 para interactuar con la llanta, W, elimina la necesidad de “transferir” una o más de una llanta, W, y neumático, T, a una estación de trabajo posterior de una pluralidad de estaciones de trabajo en una línea de montaje convencional.
En una realización, el dispositivo 50 asociado con la estación de trabajo de única celda 10 puede incluir un brazo robótico 52 que se puede ubicar en una posición sustancialmente central relacionada con una pluralidad de subestaciones. En una realización, una pluralidad de subestaciones se muestra generalmente en 12-18.
En operación, una llanta, W, se adhiere de forma removible al brazo robótico 52. En una realización, el brazo robótico 52 interactúa con la llanta, W, a lo largo de algunas o todas las etapas asociadas con la preparación del conjunto de neumático y rueda, TW. En una realización, el brazo robótico 52 puede incluir, por ejemplo, una porción base 54, una porción de cuerpo 56 conectada a la porción base 54, una porción de brazo 58 conectada a la porción de cuerpo 56, y una porción de tenaza 60 conectada a la porción de brazo 58.
En una realización, la porción de cuerpo 56 se conecta en forma giratoria a la porción base 54 de tal manera que la porción de cuerpo 56 se puede girar 360° con relación a la porción base 54. Adicionalmente, en una realización, la porción de cuerpo 56 se puede de manera general abisagrar a la porción base 54 que tiene, por ejemplo, brazos estilo tijera, abisagrados de tal manera que la porción de cuerpo 56 se puede articular verticalmente hacia arriba o hacia abajo con relación a la porción base 54.
En una realización, la porción de brazo 58 se puede conectar a la porción de cuerpo 56 de tal manera que la porción de brazo 58 se puede articular en cualquier posición hacia arriba o hacia abajo deseable con relación a la porción de cuerpo 56. Similar a la conexión giratoria de la porción base 54 y la porción de cuerpo 56, la porción de tenaza 60 se puede conectar en forma giratoria a la porción de brazo 58 de tal manera que se puede rotar la porción de tenaza 60, pivotar o de otra forma girar más o menos de 360° con relación a la porción de brazo 58. En una realización, el movimiento de las porciones 54-60 se puede controlar manualmente con una palanca de control (no mostrada) , o, alternativamente, automáticamente por medio de la lógica almacenada en un controlador que tiene un procesador (no mostrado) .
En la siguiente descripción, se apreciará que los movimientos prescritos de la porción de cuerpo 56 con relación a la porción base 54 pueden haber ocurrido antes, durante o después del movimiento de la porción de brazo 58 y/o porción de tenaza 60. Por ejemplo, la porción de cuerpo 56 puede haber sido rotada, articulada o similar con el fin de ubicar las porciones de brazo de tenaza 58, 60 a una posición deseada en o próxima a una subestación particular.
Con respecto al movimiento general del dispositivo 50 con relación a las subestaciones 12-18, en una realización, como se ve en la Figura 2, el brazo robótico 52 se manipula de tal manera que obtiene una llanta, W, en una subestación de depósito de llantas 12. Luego, en una realización, como se ve en la Figura 3, el brazo... [Seguir leyendo]
Reivindicaciones:
1. Una estación de trabajo de única celda (10) para procesar un conjunto de neumático y rueda (TW) que incluye un neumático (T) y una llanta (W) , caracterizada porque comprende:
una subestación de montaje e indexación (16, 106) que permite posicionar el neumático luego; y
un brazo robótico (52) configurado para interconectarse con la llanta del conjunto de neumático y rueda, el brazo robótico que se configura adicionalmente para:
disponer la llanta dentro de una abertura central definida por el neumático, y
compensar un punto de equilibrio pesado (THP) del neumático y un punto de equilibrio pesado (WHP) de la llanta.
2. La estación de trabajo de única celda (10) de acuerdo con la reivindicación 1, en donde la subestación de montaje e indexación (16, 106) incluye una primera pluralidad de porciones de enganche de neumático (20) que incluye una o más de primeras superficies de enganche de neumático (32) , y una segunda pluralidad de porciones de enganche de neumático (22) que incluyen
una o más segundas superficies de enganche de neumático (40) , en donde la primera y segunda pluralidad de porciones de enganche de neumático sujetan el neumático del conjunto de neumático- llanta.
3. La estación de trabajo de única celda (10) de acuerdo con la reivindicación 2, que comprende adicionalmente
una plataforma (24) , en donde la plataforma define una o más aberturas radialmente alargadas (26) que se extienden radialmente lejos de un eje central que se extiende a través de la plataforma, en donde la primera y segunda pluralidad de porciones de enganche de neumático (20, 22) se disponen de forma ajustable con relación a la plataforma (24) .
4. La estación de trabajo de única celda (10) de acuerdo con la reivindicación 3, en donde la primera pluralidad de porciones de enganche de neumático (20) se disponen de forma ajustable sustancialmente adyacentes a la plataforma (24) próximas a una o más aberturas radialmente alargadas (26) , en donde la segunda pluralidad de porciones de enganche de neumático (22) se disponen de forma ajustable a una distancia lejos de la plataforma (24) .
5. La estación de trabajo de única celda (10) de acuerdo con la reivindicación 3, en donde cada una de la segunda pluralidad de porciones de enganche de neumático (22) incluyen
una porción de brazo (34) , y
una porción de cabeza (36) conectada a la porción de brazo (34) , en donde cada porción de cabeza (36) define una de dichas una o más segundas superficies de enganche de neumático (40) .
6. La estación de trabajo de única celda (10) de acuerdo con la reivindicación 2 que comprende adicionalmente medios para ajustar (30) la primera pluralidad de porciones de enganche de neumático (20) en un dirección radial; y
medios para ajustar (30) la segunda pluralidad de porciones de enganche de neumático (22) en más de una dirección que incluye un segmento de dirección radial (RAR) , un segmento de dirección axial (RAA) , y un segmento de dirección compuesto (RARA) definido por un componente radial, y un componente axial.
7. La estación de trabajo de única celda (10) de acuerdo con la reivindicación 6, en donde los medios para ajustar
(30) la primera y segunda pluralidad de porciones de enganche de neumático (20, 22) incluyen uno o más accionadores (30) conectados a la primera y segunda pluralidad de porciones de enganche de neumático (20, 22) .
8. La estación de trabajo de única celda (10) de acuerdo con la reivindicación 7, que comprende adicionalmente
medios para determinar (S) una o más características del neumático (T) , en donde los medios para determinar (S) incluye
uno o más sensores característicos de neumático (S) conectados a uno o más accionadores (30) , en donde uno o más sensores característicos de neumático (S) proporcionan datos característicos neumáticos para un procesador conectado a uno o más accionadores (30) , en donde los datos incluyen una o más características del neumático (T) , en donde una o más características incluyen un diámetro del neumático (T) y un ancho del neumático (T) , en donde los medios para ajustar (30) la primera pluralidad de porciones de enganche de neumático en la dirección radial y los medios para ajustar la segunda pluralidad de porciones de enganche de neumático (20) en más de una dirección son sensibles a los datos característicos del neumático recibidos en el procesador.
9. Un método para procesar un conjunto de neumático y rueda (TW) que incluye un neumático (T) y una llanta (W) , caracterizado porque comprende:
posicionar una primera superficie de pared lateral (TS1) de un neumático (T) adyacente a una subestación de montaje e indexación (16, 106) ;
asegurar una llanta (W) a un brazo robótico (52) ;
utilizar el brazo robótico para disponer la llanta (W) dentro de una abertura central definida por el neumático (T) ; y
utilizar el brazo robótico para compensar un punto de equilibrio pesado (THP) del neumático (T) y un punto de equilibrio pesado (WHP) de la llanta (W) .
10. El método de acuerdo con la reivindicación 9, en donde, después de la etapa de disposición y antes de la etapa de compensación, que comprende adicionalmente la etapa de
sujetar el neumático (T) con la subestación de montaje e indexación (16, 106) para evitar rotación del neumático (T) con relación a la llanta (W) ; y
rotar la llanta (W) con relación al neumático (T) con el brazo robótico (52) .
11. El método de acuerdo con la reivindicación 9, en donde, después de la etapa de disposición y antes de la etapa de compensación, que comprende adicionalmente la etapa de
utilizar el brazo robótico (52) para evitar la rotación de la llanta (W) con relación al neumático (T) ; y
rotar el neumático (T) con relación a la llanta (W) con uno o más componentes de la subestación de montaje e indexación (16, 106) .
12. El método de acuerdo con la reivindicación 9, en donde, después de la etapa de disposición y antes de la etapa de compensación, que comprende adicionalmente la etapa de
rotar el neumático (T) en una primera dirección con la subestación de montaje e indexación (16, 106) ; y
rotar la llanta (W) en una segunda dirección con el brazo robótico (52) , en donde la primera dirección se opone a la segunda dirección.
13. El método de acuerdo con la reivindicación 9, en donde, antes de la etapa de posicionamiento, que comprende adicionalmente las etapas de determinar una característica del neumático (T) ; y
ajustar radialmente una primera pluralidad de porciones de enganche de neumático (20) de la subestación de montaje e indexación (16, 106) .
14. El método de acuerdo con la reivindicación 13, en donde, después de la etapa de posicionamiento, que comprende adicionalmente la etapa de posicionar una segunda pluralidad de porciones de enganche de neumático
(22) adyacentes a una segunda superficie de pared lateral (TS2) de un neumático (T) , en donde la primera superficie de pared lateral (TS1) se opone a la segunda superficie de pared lateral (TS2) ; y sujetar el neumático (T) con la primera y segunda pluralidad de porciones de enganche de neumático (20, 22) .
Patentes similares o relacionadas:
Aparato para montar y desmontar un neumático, del 10 de Julio de 2019, de NEXION S.p.A: Un aparato para montar y desmontar un neumático que se apoya operativamente sobre una superficie (S) de soporte, que comprende: - una […]
Sistema y método de procesamiento de montaje de neumático-rueda, del 8 de Marzo de 2017, de ANDROID INDUSTRIES LLC: Un método de procesamiento de un neumático (T) y una rueda (W) para la formación de un montaje de neumático - rueda (TW), que comprende las etapas de: colocar […]
Estación de trabajo de inflado, del 18 de Enero de 2017, de ANDROID INDUSTRIES LLC: Una estación de trabajo de inflado para inflar un conjunto (TW) de neumático-rueda que incluye un neumático (T) montado en una rueda (W), […]
Sistema y método de procesamiento de montaje de neumático-rueda, del 7 de Diciembre de 2016, de ANDROID INDUSTRIES LLC: Un aparato de procesamiento de un neumático (T) y una rueda (W) para la formación de un montaje de neumático - rueda (TW), que comprende: un miembro […]
 Dispositivo embarcado de montaje/desmontaje de neumáticos de vehículos del tipo pesado, del 16 de Marzo de 2016, de Guernet Compresseurs: Dispositivo de montaje/desmontaje de neumáticos de vehículos, especialmente del tipo pesado, embarcado en un vehículo utilitario ligero , comprendiendo […]
Dispositivo embarcado de montaje/desmontaje de neumáticos de vehículos del tipo pesado, del 16 de Marzo de 2016, de Guernet Compresseurs: Dispositivo de montaje/desmontaje de neumáticos de vehículos, especialmente del tipo pesado, embarcado en un vehículo utilitario ligero , comprendiendo […]
 Dispositivo de enclavamiento de llanta de rueda para máquinas de desmontaje de neumáticos, del 18 de Marzo de 2015, de CORGHI S.P.A.: Dispositivo para el enclavamiento de llantas de rueda para máquinas de desmontaje de neumáticos que comprende, para soportar la llanta de rueda , una placa superior […]
Dispositivo de enclavamiento de llanta de rueda para máquinas de desmontaje de neumáticos, del 18 de Marzo de 2015, de CORGHI S.P.A.: Dispositivo para el enclavamiento de llantas de rueda para máquinas de desmontaje de neumáticos que comprende, para soportar la llanta de rueda , una placa superior […]
ÚTIL DESMONTADOR DE NEUMÁTICOS, del 10 de Marzo de 2015, de MARTINEZ CAMPOS,JESUS MARIA: 1. Útil desmontador de neumáticos, el cual es del tipo de útiles desmontadores de neumáticos constituidos por una barra longitudinal metálica que en, al menos, […]
Dispositivo y procedimiento de montaje de un neumático con la ayuda de un robot, del 7 de Mayo de 2014, de SCHENCK ROTEC GMBH: Procedimiento para el montaje de un neumático sobre una llanta de base honda de una rueda de vehículo, en el que el neumático (R) es agarrado […]