Sistema mejorado de remachado automático.
Sistema mejorado de remachado automático, del tipo de los utilizados en instalaciones robotizadas para la realización con el mismo equipo,
de múltiples operaciones en el mismo punto de trabajo, tales como taladrado, avellanado, inserción de remaches, remachado, limpieza, etc.., caracterizado porque utiliza un cabezal multiherramientas sin movimiento propio de este, fijado en una máquina de cinemática paralela, siendo esta última la que realiza todos los movimientos combinados de posicionamiento del cabezal multiherramientas, realizando las oportunas correcciones de posición entre las distintas ubicaciones físicas de las herramientas independientes colocadas en el cabezal portaherramientas. La invención que se presenta aporta como principal ventaja, la de eliminar la necesidad de complejos mecanismos de cambio de cabezal portaherramientas para efectuar distintos diámetros de taladrado u otras operaciones, consiguiendo por ello una sensible reducción en el coste económico de dicho elemento ala par que aumenta su fiabilidad, precisión y duración mecánica.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/ES2005/000262.
Solicitante: LOXIN 2002, S.L..
Nacionalidad solicitante: España.
Inventor/es: BAIGORRI HERMOSO, JULIAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B21J15/10 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B21 TRABAJO MECANICO DE LOS METALES SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DEL METAL POR PUNZONADO. › B21J FORJADO; MARTILLADO; PRENSADO DE METALES; REMACHADO; HORNOS DE FORJA (laminado de metales B21B; fabricación de productos particulares por forjado o prensado B21K; chapeado B23K; tratamiento o acabado de superficies por martillado B23P 9/04; aumento de la compacidad de superficies por chorro de materiales en partículas B24C 1/10; características generales de las prensas, prensas para compactar los residuos B30B; hornos en general F27). › B21J 15/00 Remachado. › Máquinas para remachar (elementos de calefacción eléctrica H05B).
- B21J15/14 B21J 15/00 […] › especialmente adaptadas al remachado de piezas determinadas, p. ej. máquinas para poner guarniciones de frenos.
PDF original: ES-2399274_T3.pdf
Fragmento de la descripción:
Como su título indica, la presente memoria descriptiva se refiere a un sistema mejorado de remachado automático, del tipo de los utilizados en instalaciones robotizadas de precisión para la realización con el mismo equipo de múltiples funciones en el mismo punto de trabajo, tales como taladrado, avellanado, inserción de remaches, remachado, limpieza, etc., caracterizado porque utiliza un cabezal multiherramientas sin movimiento propio, fijado en una máquina de cinemática paralela, siendo esta última la que realiza todos los movimientos combinados de posicionamiento del cabezal multiherramientas, realizando las oportunas correcciones de posición entre las distintas ubicaciones físicas de las herramientas independientes colocadas en el cabezal portaherramientas.
En la actualidad son ampliamente conocidos los sistemas de remachado automático. Algunos de estos sistemas están basados en la utilización de un robot que se mueve en relación con la superficie de trabajo en la que se va a operar y que posee un brazo móvil dotado de un portaherramientas intercambiable que posee un cabezal monofunción para un determinado tipo de operación. La patente ES 2205790 T3 presenta un sistema de este tipo para el montaje del ala de una aeronave. Este tipo de sistemas presentan el inconveniente de que es necesario que el robot móvil tenga una precisión de posicionamiento repetitivo muy elevada para ejecutar más de una función en el mismo sitio. Otros sistemas están basados en el uso de un robot antropomórfico, es decir, un robot equipado con un brazo dotado de varios ejes de giro, que está anclado de manera fija al suelo o a la superficie de trabajo. A estos robots se les suelen instalar cabezales multiherramientas rotatorios, también llamados “end effectors”, tipo revolver, debido a que utilizan para el cambio de posición de las herramientas un sistema rotatorio similar a un revolver, propiciado por un motor de giro con los oportunos mecanismos de control y posicionamiento. Estos cabezales constan de una parte fija asociada al extremo del brazo de trabajo del robot antropomórfico, y de un mecanismo portaherramientas múltiple dotado de movimiento giratorio con respecto a la antedicha parte fija. En este caso el proceso que se emplea es el posicionamiento de una de las herramientas en el punto de trabajo por parte del robot antropomórfico, dejándolo fijo en ese punto, para a continuación realizarse las distintas tareas de remachado local, intercambiando las herramientas mediante el movimiento de rotación característico del cabezal multiherramientas rotatorio, de tal forma que cada operación se realice en el mismo punto y con la herramienta necesaria. En este sistema, el movimiento del robot antropomórfico únicamente se utiliza para transportar el cabezal multiherramientas rotatorio hasta el punto de trabajo, no interviniendo el movimiento del robot posteriormente en el proceso propiamente dicho de remachado, que corre en su totalidad a cargo del cabezal multiherramientas rotatorio.
Ejemplos de este tipo de cabezales multiherramientas giratorios están descritos, por ejemplo, en la patente WO2004/050275 en la que el soporte para herramientas de una remachadora automática está formado por una pluralidad de portaherramientas que se mueven con respecto a un sistema de referencia definido por el soporte para herramientas. Otros ejemplos de este tipo podemos encontrar descritos por ejemplo en las Patentes US 2002173226 “Multispindle end effector”, US 2003232579 “Multi-spindle end effector”, WO02094505 “Multi-spindle end effector” y EP0292056 “Driving mechanism and manipulator comprising a such a driving mechanism”, correspondiendo todos ellos al mismo sistema de remachado y presentando características similares de trabajo.
La patente US 6 072 583 presenta una máquina robótica antropomórfica general y un método para detectar sujeciones inclinadas o mal orientadas con respecto a su ubicación en la pieza de trabajo mediante rayos láser. Además, posee dos portaherramientas múltiples situados uno frente a otro y conectados mediante una horquilla en C. Los dos portaherramientas múltiples se emplean para fijar una pieza de trabajo entre los dos extremos opuestos de los portaherramientas.
En la patente US 4 919 321 se presenta otra disposición para el remachado de chapas. En esta disposición, tres dispositivos diferentes para taladrar, posicionar y guiar los remaches se han montado sobre una placa que puede ser rotada en el plano y en relación a un bastidor ajustable por medio de un robot, de tal modo que los dispositivos para una función individual pueden ser ajustados, uno cada vez, en una posición de trabajo común, con relación a dicho bastidor. Una vez que el bastidor ha sido ajustado de forma exacta sobre la posición de trabajo, las distintas operaciones como el taladrado, posicionamiento y guiado de los remaches son ejecutadas una cada vez girando la placa sobre la que están montados los distintos dispositivos, de modo que el dispositivo de trabajo que se necesite sea transportado encima de la posición de trabajo.
Este sistema de remachado presenta el gran inconveniente de que obliga al cabezal multiherramientas rotatorio a contar con la necesaria precisión constructiva para asegurar el correcto posicionamiento repetitivo de las distintas herramientas sobre el punto a remachar, ya que el robot antropomórfico no cuenta con esta precisión de posicionamiento repetitivo. Ello obliga a que el cabezal multiherramientas rotativo y sus elementos mecánicos internos de giro y posicionamiento deban ser de una alta precisión, realizados con materiales de muy alta calidad y bajo desgaste, originando que estos cabezales tengan un alto coste económico, en la mayor parte de los casos muy superior al coste del propio robot antropomórfico que lo soporta y transporta, además de necesitar de frecuentes labores de mantenimiento y ajuste. Es además destacable el problema adicional que suponen las frecuentes averías y el alto coste asociado a su reparación.
Para solventar los problemas que surgen con los actuales sistemas que son capaces de realizar múltiples operaciones con un único equipo, la presente invención ofrece un sistema de remachado según la reivindicación 1. Este sistema de remachado utiliza varios cabezales monofunción independientes fijados individualmente a la brida de trabajo de la máquina de cinemática paralela. Este conjunto de cabezales monofunción consiste en un soporte común dotado con una pluralidad de alojamientos, con la forma oportuna, preferentemente cilíndrica, destinados a alojar en su interior cada uno de los diferentes cabezales monofunción (de taladrado, aplicador de sellante, insertador de remaches, remachador, etc.)
La máquina de cinemática paralela utilizada como robot soporte, gracias a su intrínseca característica de poder realizar movimientos en múltiples ejes simultáneamente con una altísima precisión de posicionamiento y repetibilidad, se encarga de desplazar el conjunto de cabezales monofunción al punto de trabajo, de la misma forma que lo realizan los robots convencionales, pero asimismo se encarga posteriormente de realizar los oportunos desplazamientos de los cabezales monofuncionales, para que durante las diferentes fases del remachado, cada una de las herramientas o actuadores soportados en los diferentes cabezales individuales puedan actuar en el mismo punto de trabajo con la precisión requerida. Estos desplazamientos de la máquina de cinemática paralela equivalen a la necesaria corrección que el control numérico de la máquina de cinemática paralela debe de realizar para compensar el desplazamiento u offset que separa entre si las distintas herramientas o actuadores incluidos en los diferentes cabezales monofunción. De esta forma, durante el proceso de remachado será la propia máquina de cinemática paralela la que se encargue de posicionar las herramientas o actuadores en el punto de remachado.
Este sistema mejorado de remachado automático esta especialmente indicado para todas aquellas operaciones de precisión que impliquen el posicionamiento consecutivo de varias herramientas o actuadores en el mismo punto, como por ejemplo el taladrado y remachado, en el que podrían intervenir secuencialmente en el mismo punto una herramienta de taladrado, aspiración de virutas, inserción de remache, remachadora o depositadora de sellante y sistemas de visión artificial 3D o de comprobación de la calidad, etc., estando todos ellos ubicados de manera independiente en la misma brida soporte que hace de interfaz mecánico con la máquina de cinemática paralela.
Este conjunto de cabezales monofunción puede adoptar diversas distribuciones de los alojamientos cilíndricos, siendo preferentemente lineales,... [Seguir leyendo]
Reivindicaciones:
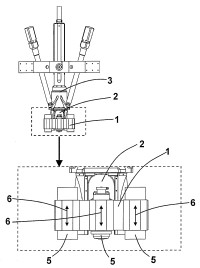
1. Sistema mejorado de remachado automático, del tipo de los utilizados en las instalaciones robotizadas de precisión para la realización de funciones múltiples con el mismo equipo, que consiste en una máquina de cinemática paralela (3) caracterizada porque comprende un conjunto (1) de varios cabezales monofunción (5) fijados individualmente y alineados paralelamente a una brida de trabajo (2) de la máquina de cinemática paralela (3) , encargándose esta última de realizar los oportunos desplazamientos de los cabezales monofunción (5) independientes al mismo punto de trabajo durante las diferentes fases del remachado, siendo estos desplazamientos de la máquina de cinemática paralela (3) equivalentes a la corrección de su control numérico para compensar el desplazamiento u offset entre los cabezales monofunción (5) independientes.
2. Sistema mejorado de remachado automático, según la anterior reivindicación, caracterizado porque el conjunto (1) de cabezales monofunción (5) independientes consiste en un soporte común dotado con una pluralidad de alojamientos (4) , preferentemente cilíndricos, que alojan cada uno en su interior uno de los cabezales monofunción (5) independientes.
3. Sistema mejorado de remachado automático, según cualquiera de las anteriores reivindicaciones, caracterizado porque cada uno de los alojamientos (4) para los cabezales monofunción (5) del
conjunto (1) de cabezales monofunción (5) está dotado de un mecanismo de desplazamiento lineal (6) para la retirada de la herramienta o actuador que no esté en uso, evitando posibles colisiones con la superficie a remachar.
4. Sistema mejorado de remachado automático, según cualquiera de las reivindicaciones anteriores, caracterizado porque la máquina de cinemática paralela (3) desplaza el conjunto (1) de cabezales monofunción (5) a la posición de trabajo, realizando a la vez los oportunos desplazamientos del conjunto (1) de cabezales monofunción (5) para que, durante el proceso de remachado, cada una de las distintas herramientas soportadas en los diferentes cabezales monofunción (5) puedan actuar consecutivamente en el mismo punto de trabajo con la precisión requerida, siendo estos desplazamientos de tal manera que realicen la necesaria corrección del desplazamiento u offset entre los diferentes cabezales monofunción (5) .
Patentes similares o relacionadas:
Método para la configuración del mandril de una remachadora para elementos de remache ciegos y remachadora, del 27 de Mayo de 2020, de HONSEL Distribution GmbH & Co: Método para la configuración de una remachadora manual , accionada por un accionamiento eléctrico , para la colocación de elementos de remache ciegos , presentando la […]
Pinzas de mecanizado, del 20 de Noviembre de 2019, de SCHMIDT, HEIKO: Pinzas de mecanizado para el mecanizado y/o procesamiento de piezas de trabajo con elevadas fuerzas de mecanizado (F) que comprende un cuerpo de las pinzas con un primer […]
Aparato para el remachado, del 7 de Agosto de 2019, de COMAU S.P.A.: Aparato para aplicar remaches en una parte (π) de una superficie plana de una pieza (P), en el que dicha parte (π) de la superficie plana define un eje operativo […]
Métodos y aparatos para operaciones de fabricación, del 22 de Mayo de 2019, de THE BOEING COMPANY: Un aparato para realizar una operación de fabricación de una pieza de trabajo, comprendiendo el aparato: un conjunto de oruga adaptado […]
Cabeza remachadora con retenedor de remaches, del 3 de Julio de 2017, de LIZARRAGA GONZALEZ, Jon Aingeru: 1. Cabeza de remachadora con retenedor de remaches, caracterizada por presentar una bola que en posición de reposo ocupa el orificio […]
Herramienta de instalación de elementos de fijación con manguitos concéntricos internos, del 4 de Enero de 2017, de Arconic Inc: Una herramienta para la instalación de un elementos de fijación, que comprende: - un conjunto de cilindro que incluye una carcasa que tiene un extremo […]
Métodos y aparatos para operaciones de fabricación, del 21 de Diciembre de 2016, de THE BOEING COMPANY: Un aparato para realizar una operación de fabricación sobre una pieza de trabajo, comprendiendo el aparato: un miembro de base; una plataforma […]
Métodos y aparatos para operaciones de fabricación, del 14 de Diciembre de 2016, de THE BOEING COMPANY: Un aparato para soportar una herramienta de fabricación con relación a una pieza de trabajo, comprendiendo el aparato […]