Dispositivo de soporte adaptable con posicionamiento relativo indexado.
La presente memoria descriptiva se refiere, como su título indica,
a un dispositivo de soporte adaptable con posicionamiento relativo indexado, del tipo de los que incorporan una pluralidad de actuadores verticales, dispuestos en módulos puentes transversalmente situados sobre un foso y dotados de desplazamiento relativo entre sí, utilizados industrialmente para la fijación de piezas dediferentes formas o de forma irregular durante su mecanizado, caracterizado porque dispone entre cada dos módulos puente dos juegos dobles de cilindros hidráulicos, estando cada juego constituidopor dos cilindros hidráulicos con diferente longitud de recorrido montados en sentidos opuestos y unidos entre sí por la parte trasera de su culata, propiciando de esta forma que el desplazamiento relativo entre cada dos módulos puente se realice de forma indexada en cuatro posiciones fijas dependiendo de que cilindros seactiven.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/ES2010/000046.
Solicitante: LOXIN 2002, S.L..
Nacionalidad solicitante: España.
Inventor/es: BAIGORRI HERMOSO, JULIAN, AGUIRRE ARTIEDA,JOSE MARIA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q1/03 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 1/00 Elementos componentes de la estructura general de un tipo de máquina, y más especialmente los elementos fijos más grandes (B23Q 37/00 tiene prioridad). › Soportes fijos de herramientas o piezas (B23Q 1/70 tiene prioridad; mesas auxiliares B23Q 1/74; contrapuntos B23B 23/00).
PDF original: ES-2427920_T3.pdf
Fragmento de la descripción:
Dispositivo de soporte adaptable con posicionamiento relativo indexado La presente memoria descriptiva se refiere, como su título indica, a un dispositivo de soporte adaptable con posicionamiento relativo indexado, del tipo de los que incorporan una pluralidad de actuadores verticales, dispuestos en módulos puente transversalmente situados sobre un foso y dotados de desplazamiento relativo entre sí, utilizados industrialmente para la fijación de piezas de formas diferentes o de formas irregulares durante su mecanizado, caracterizado porque dispone entre cada dos módulos dos juegos dobles de cilindros hidráulicos, estando cada juego constituido por dos cilindros hidráulicos con diferente longitud de recorrido montados en sentidos opuestos y unidos entre sí por la parte trasera de su culata, propiciando de esta forma que el desplazamiento relativo entre cada dos módulos puente se realice de forma indexada en cuatro posiciones fijas dependiendo de qué cilindros se activen.
En la actualidad, dentro de la industria en general y particularmente en el sector aeronáutico, son conocidos y ampliamente utilizados utillajes para fijación o dispositivos de soporte de las piezas durante los procesos de mecanizado. Estos utillajes o dispositivos presentan una problemática especial en cuanto que cada pieza distinta requiere un dispositivo de fijación diferente. En la industria aeronáutica, los aviones están formados por infinidad de piezas distintas tanto en su forma como en su tamaño, por lo que históricamente se han usado gran cantidad de estos utillajes.
Se han desarrollado algunos dispositivos de soporte genéricos adaptables a la forma de diferentes piezas, comúnmente conocidos como “tool matrixes”, que son dispositivos semi-flexibles programables que, mediante una combinación de actuadores verticales de altura variable, permiten soportar piezas de diferentes formas.
Estos dispositivos de soporte adaptables conocidos pueden ser de varios tipos:
Tool matrix pasivo – Presenta una distribución matricial de los actuadores verticales pasivos. La distribución matricial de los actuadores verticales pasivos significa que dichos actuadores están todos en una mesa a una distancia fija uno del otro, tanto en sentido longitudinal como transversal, a modo de rejilla. La denominación “pasivos” significa que los actuadores verticales no disponen de ningún accionamiento en ninguno de los tres ejes y por lo tanto su ajuste en sentido vertical debe ser realizado por otros dispositivos, tales como manipuladores externos ó por la propia máquina mecanizadora que trabaja conjuntamente con el utillaje flexible. Este dispositivo presenta el inconveniente de que es muy lento en los reposicionados para las distintas piezas a mecanizar, ya que el manipulador ó la máquina posicionan uno a uno todos los actuadores, lo cual puede tardar varias horas.
Tool matrix activo verticalmente -Presenta una distribución matricial de los actuadores verticales. Este dispositivo es igual al anterior, con la única diferencia que cada actuador vertical dispone de su propio accionamiento. Esto permite un posicionado simultáneo de todos los actuadores a la vez mediante un dispositivo externo de control, como por ejemplo un ordenador o controlador industrial tipo PLC, con lo que el tiempo de posicionado se reduce a algunos minutos. Presenta el inconveniente, al igual que el tipo anterior, de que no disponen de posibilidad de desplazamientos en el eje X de los actuadores que permitan flexibilizar su posicionamiento.
Tool matrix flexible - La distribución de los actuadores sobre el área de trabajo, en vez de ser de tipo rejilla ó matriz de paso fijo como en los casos anteriores, es variable mediante programación. Esta flexibilidad de distribución permite ajustar mediante accionamientos individuales la posición de los actuadores en sitios estratégicos de la pieza a mecanizar para optimizar su capacidad de soporte de peso o para mejorar la adaptación a piezas de formas variadas.
Este tipo de dispositivos presenta el inconveniente de que la densidad de actuadores o ventosas es variable en función del tamaño de la pieza a soportar; es decir, para piezas de gran tamaño la densidad será menor que para las piezas de menor tamaño. Además, este tipo de dispositivos tienen el inconveniente añadido de que resultan excesivamente costosos por la cantidad de accionamientos que conllevan y son ergonómicamente inapropiados.
Una variación de este último tipo de dispositivo la encontramos reflejada en la Patente Española 200001906 “Sistema flexible y programable de posicionamiento relativo para soporte de piezas irregulares”, que incorpora una pluralidad de actuadores verticales dispuestos en módulos puente transversalmente situados sobre un foso, relacionados entre sí y, particularmente, con sus enfrentados, merced a la colaboración de unos actuadores ubicados en los extremos de dichos puentes, de tal manera que el extremo de su cuerpo queda anclado en un puente, al tiempo que el extremo del vástago queda relacionado al puente enfrentado. Este sistema, a pesar del incremento en la flexibilidad de posicionamiento que comporta, presenta el inconveniente de que los actuadores ubicados en los extremos de los puentes necesitan de gran precisión para poder colocarse en la posición apropiada, con lo que su coste económico es bastante alto, influyendo notablemente en el alto coste económico del dispositivo.
En ES 2 188 327 A1 se presenta un sistema de posicionamiento relativo programable y flexible para el soporte de piezas irregulares para su mecanizado. El sistema incorpora una multitud de columnas o actuadores donde las piezas son fijadas en la parte superior de sus vástagos. Dicho sistema posee múltiples puentes interrelacionados situados transcersalmente en un foso utilizando actuadores, a la vez que, longitudinalmente, posee una multitud importante de actuadores cuyos vástagos sobresalen por encima de los puentes. Estos puentes están conectados entre sí por sus respectivos extremos mediate un cilíndro neumático. La distancia entre los puentes está limitida a dos valores distintos: El cilindro de conexión está, o desactivado (distancia mínima) o activado (distancia máxima) . La presente invención, por el contrario, es más flexible y no está limitada a dos distancias distintas.
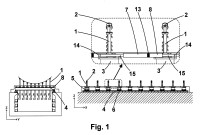
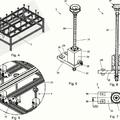
Para solventar la problemática existente en la actualidad en cuanto al soporte de piezas en la industria, especialmente en la industria aeronáutica, se ha ideado el dispositivo de soporte adaptable con posicionamiento relativo indexado objeto de la presente invención, el cual está formado por una pluralidad de actuadores verticales, desplazables en el eje Z,
dotados en su parte superior de una copa de vacío magnética y dispuestos en unos travesaños desplazables en el eje X, cada uno con un número determinado de actuadores en función del ancho de las piezas a tomar y de las características del material a mecanizar, metal o materiales compuestos, etc…
A su vez, cada travesaño se encuentra instalado sobre dos guías de elementos rodantes montadas en paralelo, con dos patines en cada uno de los lados y un freno de seguridad entre ambos, preferentemente del tipo de frenado por muelle, de tal manera que, una vez efectuado el posicionado, se desactiva la acometida neumática de estos frenos, quedando cada travesaño fijado a las guías longitudinales.
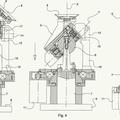
Los travesaños están relacionados entre sí por medio de dos cilindros neumáticos de diferente carrera o curso, -K- para el de mayor curso, y -k- para el curso menor, unidos por sus culatas o partes traseras, de tal manera que según qué cilindro neumático se active, se regula la distancia -X- entre travesaños de forma indexada en cuatro valores diferentes, A, B, C ó D:
A - Distancia mínima (ambos cilindros desactivados)
A = X
B - Distancia segunda (cilindro de menor carrera activado)
B = X+k
C - Distancia tercera (cilindro de mayor carrera activado)
B = X+K
D - Distancia máxima (ambos cilindros activados)
B = X+k+K
Cada cilindro neumático será controlado por su correspondiente electroválvula que irá comandada por un dispositivo de control, tipo PLC o sistema informático externo, en función de su programación.
Evidentemente, uno de los travesaños ha de ser fijado a la base o suelo para que sirva de elemento de origen en el posicionado del resto de travesaños, siendo posible que sea cualquiera de ellos, dando lugar a una matriz de origen programable y con la posibilidad de que la distancia entre travesaños sea diferente entre todos ellos.
Este dispositivo de soporte adaptable con posicionamiento relativo indexado que se presenta aporta... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de soporte adaptable con posicionamiento relativo indexado, del tipo de los que incorporan una pluralidad de actuadores verticales (1) , dispuestos en unos travesaños (3) situados sobre un foso y dotados de desplazamiento relativo entre sí, utilizados industrialmente para la fijación de piezas de formas diferentes o irregulares durante el proceso de mecanizado, caracterizado porque los travesaños (3) están relacionados entre sí en cada uno de sus extremos por medio de dos cilindros neumáticos (7, 8) de diferentes carreras, unidos entre sí por la parte posterior de sus culatas o partes traseras (13) , y relacionados con cada travesaño (3) en los extremos (14) de cada vástago (15) .
2. Dispositivo de soporte adaptable según la reivindicación 1, caracterizado porque los travesaños (3)
son regulados mediante los cilindros neumáticos (7, 8) , de carrera más corta y más larga, a distancias con cuatro valores distintos:
A) - Distancia mínima - ambos cilindros (7, 8) desactivados B) - Distancia segunda - cilindro de menor carrera (8) activado C) - Distancia tercera - cilindro de mayor carrera (7) activado D) - Distancia máxima - ambos cilindros (7, 8) activados 3. Dispositivo de soporte adaptable según las reivindicaciones 1 o 2, caracterizado porque cada cilindro neumático (7, 8) es controlado por su correspondiente electroválvula, comandada por un dispositivo de control tipo PLC o sistema informático externo, en función de su programación.
4. Dispositivo de soporte adaptable según cualquiera de las reivindicaciones 1 a 3, caracterizado porque cada uno de los actuadores verticales (1) es desplazable individualmente en el sentido Z y modularmente en el sentido X.
5. Dispositivo de soporte adaptable según cualquiera de las reivindicaciones 1 a 4, caracterizado porque los actuadores verticales (1) están dotados en su parte superior de una copa de vacío magnética (2) .
Patentes similares o relacionadas:
Aparato para soportar una pieza, del 30 de Octubre de 2019, de C.M.S. S.P.A.: Aparato para soportar una pieza a trabajar, comprendiendo dicho aparato una o más unidades de soporte, comprendiendo cada unidad de soporte: - un carro que […]
Dispositivo y procedimiento para posicionar un elemento de sujeción, del 23 de Octubre de 2019, de HOMAG GmbH: Dispositivo para posicionar un elemento de sujeción, que está previsto para fijar una pieza de trabajo en una estación de mecanizado, presentando el […]
 Sistema para soportar una pieza a trabajar, del 1 de Agosto de 2018, de C.M.S. S.P.A.: Sistema de soporte para soportar una pieza (P) a trabajar en una posición de mecanización, comprendiendo el sistema una pluralidad de unidades […]
Sistema para soportar una pieza a trabajar, del 1 de Agosto de 2018, de C.M.S. S.P.A.: Sistema de soporte para soportar una pieza (P) a trabajar en una posición de mecanización, comprendiendo el sistema una pluralidad de unidades […]
UTILLAJE PARA EL MECANIZADO DE PIEZAS CON CURVATURA, del 30 de Noviembre de 2017, de ZAYER, S.A.: Utillaje para el mecanizado de piezas con curvatura que permite adaptarse a dicha curvatura, aporte un amarre continuo, siendo una solución de bajo coste con respecto a las […]
DISPOSITIVO DE GIRO Y BLOQUEO EN VENTOSAS DE VACÍO, del 11 de Agosto de 2016, de BORNAECHEA MORLANS, Antonio: Dispositivo de giro y bloqueo para ventosas de vacío, especialmente para ventosas que se utilizan para la sujeción de cuerpos que han de ser mecanizados en máquinas […]
Aparato y métodos para la manipulación y soporte de paneles, del 10 de Agosto de 2016, de BAE SYSTEMS PLC: Un método de manipulación y soporte de un panel para un barco, que incluye los pasos de: proporcionar un soporte para piezas de trabajo que tiene una superficie […]
Aparato de soporte de piezas a trabajar, del 15 de Junio de 2016, de C.M.S. S.P.A.: Aparato para soportar una pieza a trabajar en una posición de mecanización, que comprende al menos una unidad funcional que comprende a su […]
 Sistema de posicionamiento, identificación y trabajo de un componente semi-acabado, del 16 de Marzo de 2016, de Persico S.p.A: Sistema de posicionamiento, identificación y trabajo de al menos un componente semi-acabado , del tipo en el que un controlador gestiona un trabajo […]
Sistema de posicionamiento, identificación y trabajo de un componente semi-acabado, del 16 de Marzo de 2016, de Persico S.p.A: Sistema de posicionamiento, identificación y trabajo de al menos un componente semi-acabado , del tipo en el que un controlador gestiona un trabajo […]