Dispositivo de soporte con posicionamiento relativo.
Dispositivo de soporte adaptable con posicionamiento relativo,
del tipo de los que incorporan una pluralidad de actuadores verticales, dispuestos en módulos puentes transversalmente situados sobre un foso y dotados de desplazamiento relativo entre sí, utilizados industrialmente para la fijación de piezas de diferentes formas o de forma irregular durante su mecanizado, caracterizado porque dispone entre cada dos travesaños o módulos puente de dos actuadores eléctricos controlados por servomotores, propiciando de esta forma que el desplazamiento relativo entre cada dos módulos puente pueda adoptar cualquier valor entre 0 y el máximo recorrido posible de los actuadores eléctricos.
Este dispositivo presenta las principales ventajas de un coste económico reducido y una gran rapidez y precisión de posicionamiento en el eje X.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201230397.
Solicitante: LOXIN 2002, S.L..
Nacionalidad solicitante: España.
Inventor/es: BAIGORRI HERMOSO, JULIAN, AGUIRRE ARTIEDA,JOSE MARIA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q1/03 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 1/00 Elementos componentes de la estructura general de un tipo de máquina, y más especialmente los elementos fijos más grandes (B23Q 37/00 tiene prioridad). › Soportes fijos de herramientas o piezas (B23Q 1/70 tiene prioridad; mesas auxiliares B23Q 1/74; contrapuntos B23B 23/00).
Fragmento de la descripción:
Dispositivo de soporte con posicionamiento relativo.
La presente memoria descriptiva se refiere, como su título indica, a un dispositivo de soporte adaptable con posicionamiento relativo, del tipo de los que incorporan una pluralidad de actuadores verticales, dispuestos en módulos puentes transversalmente situados sobre un foso y dotados de desplazamiento relativo entre sí, utilizados industrialmente para la fijación de piezas de diferentes formas o de forma irregular durante su mecanizado, caracterizado porque dispone entre cada dos travesaños ó módulos puente de dos actuadores eléctricos controlados por servomotores, propiciando de esta forma que el desplazamiento relativo entre cada dos módulos puente pueda adoptar cualquier valor entre 0 y el máximo recorrido posible de los actuadores eléctricos.
Estado de la Técnica
En la actualidad, dentro de la industria en general y particularmente en el sector aeronáutico son conocidos y ampliamente utilizados utillajes para fijación o dispositivos de soporte de las piezas durante los procesos de mecanizado. Estos utillajes o dispositivos presentan una problemática especial en cuanto cada pieza distinta requiere un dispositivo de fijación diferente. En la industria aeronáutica los aviones están formados por infinidad de piezas distintas, tanto en su forma como en su tamaño, por lo que históricamente se han usado gran cantidad de estos utillajes.
Se han desarrollado algunos dispositivos de soporte genéricos adaptables a la forma de diferentes piezas, comúnmente conocidos como “tool matrix”, que son dispositivos semi-flexibles programables que, mediante una combinación de actuadores verticales de altura variable, permiten soportar piezas de diferentes formas.
Estos dispositivos de soporte adaptables conocidos pueden ser de varios tipos:
Tool matrix pasivo – Presenta una distribución matricial de los actuadores verticales pasivos. La distribución matricial de los actuadores verticales pasivos significa que dichos actuadores están todos en una mesa a una distancia fija uno del otro, tanto en sentido longitudinal como transversal, a modo de rejilla. La denominación “pasivo” significa que los actuadores verticales no disponen de ningún accionamiento en ninguno de los tres ejes y por lo tanto su ajuste en sentido vertical debe ser realizado por otros dispositivos, tales como manipuladores externos ó por la propia máquina mecanizadora que trabaja conjuntamente con el utillaje flexible. Este dispositivo presenta el inconveniente de que es muy lento en reposicionados para las distintas piezas a mecanizar, ya que el manipulador ó la máquina posicionan uno a uno todos los actuadores, lo cual puede tardar varias horas.
Tool matrix activo verticalmente -Presenta una distribución matricial de los actuadores verticales. Este dispositivo es igual al anterior con la única diferencia que cada actuador vertical dispone de su propio accionamiento. Esto permite un posicionado simultáneo de todos los actuadores a la vez mediante un dispositivo externo de control, como por ejemplo un ordenador o controlador industrial tipo PLC, con lo que el tiempo de posicionado se reduce a algunos minutos. Presenta el inconveniente, al igual que el tipo anterior, de que no disponen de posibilidad de desplazamientos en el eje X de los actuadores que permitan flexibilizar su posicionamiento.
Tool matrix flexible -La distribución de los actuadores sobre el área de trabajo en vez de ser de tipo rejilla ó matriz de paso fijo como en los casos anteriores, es variable mediante programación. Esta flexibilidad de distribución permite ajustar mediante accionamientos individuales la posición de los actuadores en sitios estratégicos de la pieza a mecanizar para optimizar su capacidad de soporte de peso o para mejorar la adaptación a piezas de variadas formas. Este tipo de dispositivos presenta el inconveniente de que la densidad de actuadores o ventosas es variable en función del tamaño de la pieza a soportar; es decir, para piezas de gran tamaño la densidad será menor que para las piezas de menor tamaño. Además este tipo de dispositivos tienen el inconveniente añadido de que resultan excesivamente costosos por la cantidad de accionamientos que conlleva y son ergonómicamente inapropiados.
Antecedentes de la invención
Una variación del soporte de tipo tool matrix flexible la encontramos reflejada en la Patente ES200001906 “Sistema flexible y programable de posicionamiento relativo para soporte de piezas irregulares” que incorpora una pluralidad de actuadores verticales dispuestos en módulos puente transversalmente situados sobre un foso relacionados entre sí y particularmente con sus enfrentados merced a la colaboración de unos actuadores ubicados en los extremos de dichos puentes, de tal manera que el extremo de su cuerpo queda anclado en un puente, al tiempo que el extremo del vástago queda relacionado al puente enfrentado. Este dispositivo, a pesar del incremento en la flexibilidad de posicionamiento que comporta, presenta el inconveniente de que los actuadores ubicados en los extremos de los puentes necesitan de gran precisión para poder colocarse en la posición apropiada, con lo que su coste económico es bastante alto, influyendo notablemente en la baja rentabilidad del dispositivo.
También son conocidos otros tipos de diapositivos, como el recogido en la Patente española P9002889 “Sistema para el posicionado espacial de piezas”, en el que cada una de las columnas telescópicas comportansu propio motor para establecer un posicionado vertical, y además van agrupadas sobre unos soportes que permiten el movimiento de las columnas según direcciones perpendiculares en el plano horizontal, permitiendo el posicionado de las columnas según los tres ejes cartesianos, gobernado desde una unidad de control computerizado, o el reivindicado en la Patente española P9100894 “Máquina para el soporte y mecanización de piezas”, en el que una pluralidad de columnas van agrupadas en conjuntos dispuestos sobre unos módulos transversales de los que cada módulo es susceptible de desplazarse independientemente a lo largo de una dirección horizontal X, cada conjunto de columnas dispuestas sobre un mismo módulo es capaz de desplazarse a lo largo de dicho módulo según un movimiento independiente para cada columna que sigue una trayectoria horizontal y en dirección Y perpendicular a la anterior, cada columna incorpora en su extremo superior el correspondiente elemento sustentante de la pieza a mecanizar con posibilidad de un selectivo desplazamiento independiente en verticalidad según una dirección Z, con la particularidad de que todos éstos desplazamientos independientes vienen comandados desde un ordenador, de manera que los elementos sustentadores se desplazan automáticamente según un sistema de tres ejes cartesianos.
Este tipo de dispositivos, al igual que el anterior, realizan un posicionamiento de los módulos de soporte a lo largo del eje X de carácter absoluto, en el que cada módulo puede fijarse a una distancia X del origen variable e independiente del resto de los módulo, dando una gran flexibilidad de trabajo pero generando una enorme complejidad estructural y mecánica, debiendo utilizar actuadores de precisión de grandes recorridos, además de la dificultad de su manejo, que origina un alto coste económico de este tipo de soportes, que encarece el proceso de fabricación.
Existe algún tipo de soporte, como por ejemplo el descrito en la Patente ES2010000046 "Dispositivo de soporte adaptable con posicionamiento relativo indexado", que pretende una simplificación del posicionamiento con el fin de reducir el coste económico, propiciando una ampliación de sus aplicaciones. Para ello realiza un posicionamiento relativo en el eje X en lugar de absoluto como en los casos anteriores, utilizando además entre cada dos módulos de soporte o travesaños adyacentes dos cilindros preferentemente neumáticos de diferente carrera o curso, -K-para el de mayor curso, y –k-para el curso menor, unidos por sus culatas o partes traseras, de tal manera que, según que cilindro neumático se active, la distancia x entre esos dos travesaños se regula por tanto de forma indexada en cuatro valores diferentes: 0, k, K, k+K. Este tipo de posicionamiento reduce notablemente el coste económico frente a los anteriores, pero con la limitación de que el posicionamiento del soporte en el eje X únicamente puede regularse con separaciones entre travesaños adyacentes que adopten cuatro valores, además de carecer de desplazamiento en el eje Y.
Descripción...
Reivindicaciones:
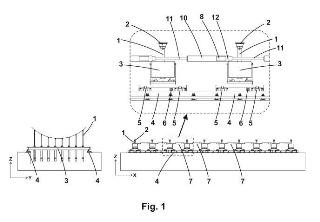
1 – Dispositivo de soporte adaptable con posicionamiento relativo, del tipo de los que incorporan una pluralidad de actuadores verticales (1) , dispuestos en unos travesaños (3) situados sobre un foso y dotados de desplazamiento entre sí, utilizados industrialmente para la fijación de piezas de diferentes formas o de forma irregular durante su mecanizado, caracterizado porque los travesaños (3) están relacionados entre sí por medio de dos actuadores eléctricos (7) ubicados entre cada dos travesaños (3) adyacentes.
2 – Dispositivo de soporte adaptable con posicionamiento relativo, según la reivindicación anterior, caracterizado porque los actuadores eléctricos (7) están constituidos por un servomotor (8) asociado con un encoder (12) de posición, un husillo (10) y un vástago (11) .
3 -Dispositivo de soporte adaptable con posicionamiento relativo, según cualquiera de las revinidicaciones anteriores, caracterizado porque el desplazamiento relativo entre cada dos travesaños (3) adopta cualquier valor entre 0 y el máximo recorrido posible de los actuadores eléctricos (7) .
4 -Dispositivo de soporte adaptable con posicionamiento relativo, según cualquiera de las revinidicaciones anteriores, caracterizado porque los actuadores eléctricos (7) están conectados a un dispositivo de control, tipo PLC o sistema informático externo.
Patentes similares o relacionadas:
Aparato para soportar una pieza, del 30 de Octubre de 2019, de C.M.S. S.P.A.: Aparato para soportar una pieza a trabajar, comprendiendo dicho aparato una o más unidades de soporte, comprendiendo cada unidad de soporte: - un carro que […]
Dispositivo y procedimiento para posicionar un elemento de sujeción, del 23 de Octubre de 2019, de HOMAG GmbH: Dispositivo para posicionar un elemento de sujeción, que está previsto para fijar una pieza de trabajo en una estación de mecanizado, presentando el […]
 Sistema para soportar una pieza a trabajar, del 1 de Agosto de 2018, de C.M.S. S.P.A.: Sistema de soporte para soportar una pieza (P) a trabajar en una posición de mecanización, comprendiendo el sistema una pluralidad de unidades […]
Sistema para soportar una pieza a trabajar, del 1 de Agosto de 2018, de C.M.S. S.P.A.: Sistema de soporte para soportar una pieza (P) a trabajar en una posición de mecanización, comprendiendo el sistema una pluralidad de unidades […]
UTILLAJE PARA EL MECANIZADO DE PIEZAS CON CURVATURA, del 30 de Noviembre de 2017, de ZAYER, S.A.: Utillaje para el mecanizado de piezas con curvatura que permite adaptarse a dicha curvatura, aporte un amarre continuo, siendo una solución de bajo coste con respecto a las […]
DISPOSITIVO DE GIRO Y BLOQUEO EN VENTOSAS DE VACÍO, del 11 de Agosto de 2016, de BORNAECHEA MORLANS, Antonio: Dispositivo de giro y bloqueo para ventosas de vacío, especialmente para ventosas que se utilizan para la sujeción de cuerpos que han de ser mecanizados en máquinas […]
Aparato y métodos para la manipulación y soporte de paneles, del 10 de Agosto de 2016, de BAE SYSTEMS PLC: Un método de manipulación y soporte de un panel para un barco, que incluye los pasos de: proporcionar un soporte para piezas de trabajo que tiene una superficie […]
Aparato de soporte de piezas a trabajar, del 15 de Junio de 2016, de C.M.S. S.P.A.: Aparato para soportar una pieza a trabajar en una posición de mecanización, que comprende al menos una unidad funcional que comprende a su […]
 Sistema de posicionamiento, identificación y trabajo de un componente semi-acabado, del 16 de Marzo de 2016, de Persico S.p.A: Sistema de posicionamiento, identificación y trabajo de al menos un componente semi-acabado , del tipo en el que un controlador gestiona un trabajo […]
Sistema de posicionamiento, identificación y trabajo de un componente semi-acabado, del 16 de Marzo de 2016, de Persico S.p.A: Sistema de posicionamiento, identificación y trabajo de al menos un componente semi-acabado , del tipo en el que un controlador gestiona un trabajo […]