Procedimiento de posicionamiento relativo de vehículos terrestres con relación a una grúa.
Procedimiento de posicionamiento relativo de vehículos terrestres con relación a una grúa (2) de carga ydescarga,
recíprocamente, hacia y desde dichos vehículos, en el que un primer vehículo (101) se posiciona debajode dicha grúa (2), caracterizado porque al menos un segundo vehículo (102) detecta la posición del primer vehículo(101) para posicionarse con relación a él.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2010/051865.
Solicitante: Envision Vehicle Engineering Novasio Technology Event.
Nacionalidad solicitante: Francia.
Dirección: 11 rue du 47ème d'Artillerie 70400 Hericourt FRANCIA.
Inventor/es: HECKY,STÉPHANE, BALON,PASCAL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G63/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › Transferencia o transbordo a zonas de almacenaje, a estaciones de mercancías o a puertos; Instalaciones de estaciones de clasificación.
- B66C13/46 B […] › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › Indicadores de posición para cargas suspendidas o para elementos de grúas.
- G06Q10/00 FISICA. › G06 CALCULO; CONTEO. › G06Q METODOS O SISTEMAS DE PROCESAMIENTO DE DATOS ESPECIALMENTE ADAPTADOS PARA FINES ADMINISTRATIVOS, COMERCIALES, FINANCIEROS, DE GESTION, DE SUPERVISION O DE PRONOSTICO; METODOS O SISTEMAS ESPECIALMENTE ADAPTADOS PARA FINES ADMINISTRATIVOS, COMERCIALES, FINANCIEROS, DE GESTION, DE SUPERVISION O DE PRONOSTICO, NO PREVISTOS EN OTRO LUGAR. › Administración; Gestión.
PDF original: ES-2431827_T3.pdf
Fragmento de la descripción:
Procedimiento de posicionamiento relativo de vehículos terrestres con relación a una grúa La presente invención entra en el marco del transporte de cargas, en particular la carga y la descarga de contenedores.
Se observará que tal contenedor, o “container”, presenta una forma de paralelepípedo rectangular, cuyas dimensiones han sido normalizadas a nivel internacional, a saber, ocho pies de largo para una longitud de veinte, treinta y cuarenta pies.
La invención encontrará una aplicación preferencial, pero de ninguna manera limitativa, en el transporte de contenedores dentro de una infraestructura portuaria, para el trasbordo desde un vehículo marítimo, tal como un buque de tipo porta-contenedores, hacia un vehículo terrestre y a la inversa. Este trasbordo se efectúa generalmente a partir de grúas equipadas con un prolongador, comúnmente llamado “spreader”.
En este marco, la carga y la descarga de contenedores necesitan un tiempo de inmovilización de los vehículos afectados, que conviene disminuir al máximo para mejorar la rentabilidad y los costes generados de esta manera.
Ésta es la razón por la que los prolongadores han sido modificados para pasar de un transporte sencillo, desplazamiento de un único contenedor en cada movimiento entre los vehículos, a uno múltiple, que permite desplazar varios contenedores, en forma de una o varias hileras, en un solo movimiento.
Sin embargo, si bien se facilita la recuperación o la deposición de hileras de contenedores al nivel de un buque porta-contenedores, no sucede lo mismo al nivel de los vehículos terrestres. En efecto, varios vehículos terrestres deben estar posicionados entonces de manera precisa, debajo de la grúa, de tal manera que el operador pueda depositar allí o recuperar allí los contenedores con un mínimo de manipulación, principalmente interviniendo lo menos posible sobre la separación de los prolongadores.
Para ello, existen sistemas de posicionamiento de vehículos terrestres, en particular de su chasis, con relación a la grúa. Una solución sencilla y extendida consiste en una marca en el suelo, que delimita los emplazamientos de los vehículos con relación a la grúa. Los conductores sólo tienen que aparcar sus vehículos a los lugares especificados. Como complemento, están instalados sistemas de semáforos de tráfico tricolores, que permiten indicar al conductor cuándo debe pararse. Esta solución sigue siendo, sin embargo, precaria y no proporciona plena satisfacción.
Además, si bien el emplazamiento en el sentido de avance, es decir, longitudinal, puede ser relativamente preciso, el posicionamiento lateral del vehículo continúa siendo impreciso.
Por este motivo, se ha imaginado coordinar directamente el emplazamiento de los vehículos con relación a la grúa. Una solución consiste en una guía manual del conductor por el operador de la grúa a través de medios de representación incorporados en el vehículo, a nivel del habitáculo. La eficacia de tal sistema depende, sin embargo, de las instrucciones dadas al conductor y no permite, o difícilmente, posicionar varios vehículos simultáneamente.
Para paliar este inconveniente, siempre con un deseo de optimización, se han empleado sistemas automáticos con el fin de transmitir instrucciones a varios vehículos simultáneamente para que se posicionen correctamente debajo 45 de la grúa. Tales sistemas automáticos utilizan una referencia global centrada con relación a la grúa que transmite sus instrucciones a cada vehículo en función de la posición detectada del vehículo respectivo. Esta detección se puede efectuar por numerosos medios, tales como haces de láser o de infrarrojos con blancos o balizas montados sobre los vehículos o bien parejas de emisor / receptor dispuestas sobre el vehículo y la grúa.
Han sido considerados otros sistemas, tal como un posicionamiento global por satélite (GPS) , pero no aportan una precisión satisfactoria y sirven, por lo tanto, para un primer posicionamiento aproximado, antes de utilizar un sistema automático mencionado anteriormente.
Los métodos y dispositivos de posicionamiento del estado de la técnica presentan un inconveniente importante 55 debido a la referencia global centrada con relación a la grúa. Además, tales sistemas deben esperar a que se realice el posicionamiento del o de los vehículos de cabeza para permitir el posicionamiento de los otros vehículos.
Los documentos WO 03/078292, DE 40.05.538 y EP 1.182.154 ilustran este estado de conocimientos del experto en la materia.
La presente invención tiene por objeto paliar los inconvenientes del estado de la técnica proponiendo una nueva solución de posicionamiento relativo de los vehículos con relación a la grúa, en particular un posicionamiento relativo de los vehículos entre sí.
Para ello, la presente invención tiene por objeto un procedimiento de posicionamiento relativo de vehículos terrestres con relación a una grúa de carga y descarga de una carga, recíprocamente, hacia y desde dichos vehículos.
En tal procedimiento de posicionamiento, un primer vehículo se posiciona debajo de dicha grúa, y se caracteriza porque al menos un segundo vehículo detecta la posición del primer vehículo para posicionarse con relación a él.
Según otra característica, el posicionamiento de los vehículos se efectúa en tiempo real.
Ventajosamente, el posicionamiento de dicho segundo vehículo se efectúa mientras el primer vehículo está en movimiento.
Además, el posicionamiento del primer vehículo debajo de la grúa se efectúa con relación a una referencia global centrada debajo de la grúa o a través de informaciones de guía transmitidas desde dicha grúa.
Con preferencia, este procedimiento consiste en calcular los diferenciales de coordenadas, según al menos dos ejes, de las posiciones entre el primero y el segundo vehículo, luego en función de dichos diferenciales, transmitir
indicaciones de guía a dicho segundo vehículo.
Según un modo de realización, se aplica un grado de tolerancia a dichos diferenciales.
La invención asegura así un posicionamiento preciso de los vehículos entre sí, en tiempo real, y que se puede efectuar simultáneamente.
Otras características y ventajas de la invención se deducirán de la descripción detallada que seguirá de modos de realización no limitativos de la invención, con referencia a las figuras anexas, en las que:
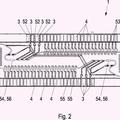
La figura 1 representa esquemáticamente una vista lateral de una grúa en curso de carga / descarga de contenedores sobre un vehículo; y
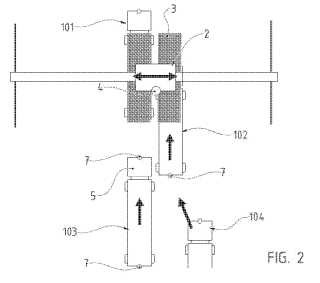
La figura 2 representa esquemáticamente una vista desde arriba de una misma grúa en fase de carga / descarga de contenedores sobre varios vehículos en el momento de posicionarlos relativamente unos con respecto a los otros por medio del procedimiento según la invención.
La presente invención se refiere al posicionamiento de vehículos terrestres 1 con relación a una grúa 2 de carga y descarga de una carga, principalmente al menos un contenedor 3, recíprocamente, hacia y desde dichos vehículos 1.
Ventajosamente, el posicionamiento según la invención es relativo, es decir, que considera posicionar, con relación a dicha grúa 2, un segundo vehículo 102 con relación a un primer vehículo 101 ya posicionado o en curso de posicionamiento. En este último caso, el posicionamiento de varios vehículos 101, 102, 103, 104 se efectúa entonces de manera simultánea.
Para ello, la invención tiene por objeto un procedimiento de posicionamiento relativo de vehículos terrestres 101, 102, 103, 104 con relación a dicha grúa 2, en particular de al menos dos vehículos 101, y 102.
En primer lugar, tal procedimiento prevé posicionar un primer vehículo 101 debajo de dicha grúa 2 de manera 45 estándar, es decir, con relación a una referencia global centrada sobre la grúa 2.
Este posicionamiento inicial del primer vehículo 101 se puede efectuar de diferentes maneras, en particular transmitiendo datos de posicionamiento desde la grúa 2.
Así, el posicionamiento del primer vehículo 101 debajo de la grúa 2 se efectúa con relación a una referencia global centrada debajo de la grúa 2 o directamente a través de informaciones de guía transmitidas desde dicha grúa 2. Estas informaciones de guía pueden ser comunicadas por un operador o bien de manera automática.
Por otra parte, estos datos pueden ser transmitidos automáticamente por la grúa 2 y el sistema de posicionamiento 55 considerado. En efecto, la grúa 2 puede incorporar entonces medios de detección 4 de al menos un vehículo 101 en una zona delimitada. Desde de la detección... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de posicionamiento relativo de vehículos terrestres con relación a una grúa (2) de carga y descarga, recíprocamente, hacia y desde dichos vehículos, en el que un primer vehículo (101) se posiciona debajo 5 de dicha grúa (2) , caracterizado porque al menos un segundo vehículo (102) detecta la posición del primer vehículo (101) para posicionarse con relación a él.
2. Procedimiento de posicionamiento relativo según la reivindicación 1, caracterizado porque el posicionamiento de los vehículos (101, 102) se efectúa en tiempo real.
1.
3. Procedimiento de posicionamiento relativo según una cualquiera de las reivindicaciones 1 ó 2, caracterizado porque el posicionamiento de dicho segundo vehículo (102) se efectúa mientras el primer vehículo (101) está en movimiento.
4. Procedimiento de posicionamiento relativo según una cualquiera de las reivindicaciones precedentes, caracterizado porque el posicionamiento del primer vehículo (101) debajo de la grúa (2) se efectúa con relación a una referencia global centrada debajo de dicha grúa (2) o a través de informaciones de guía transmitidas desde dicha grúa (2) .
5. Procedimiento de posicionamiento relativo según una cualquiera de las reivindicaciones precedentes, caracterizado porque consiste en calcular los diferenciales de coordenadas, según al menos dos ejes, de las posiciones entre el primer (101) y el segundo (102) vehículos, luego, en función de dichos diferenciales, en transmitir indicaciones de guía a dicho segundo vehículo (102) .
6. Procedimiento de posicionamiento relativo según la reivindicación 5, caracterizado porque se aplica un grado de tolerancia a dichos diferenciales.
Patentes similares o relacionadas:
Procedimiento y dispositivo para el almacenamiento y recuperación o reubicación de contenedores en almacenes de gran altura, del 4 de Marzo de 2020, de AMOVA GmbH: Procedimiento para almacenar y recuperar o reubicar contenedores en almacenes de gran altura de una instalación de transbordo, […]
Grúa "Backpack transtainer", del 13 de Febrero de 2020, de BARBERÁ MAYOR, Juan Carlos: El propósito de la invención de este proceso es aumentar el rendimiento de las terminales portuarias en la transferencia de contenedores […]
Control de grúa automatizado teniendo en cuenta errores de medición que dependen del objeto de carga y de la posición, del 5 de Noviembre de 2019, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento de control para un sistema de transbordo que comprende una grúa pórtico para contenedores dispuesta sobre un suelo con un carro […]
Dispositivo de aparcamiento robotizado y método para manejarlo, del 23 de Octubre de 2019, de Ocado Innovation Limited: Un sistema de aparcamiento robotizado que comprende al menos un dispositivo 50 de manipulación de carga y una pluralidad de contenedores 10 que alojan […]
"BufferCrane" proceso de alto rendimiento para grúas de carga y descarga masiva, del 14 de Octubre de 2019, de BARBERÁ MAYOR, Juan Carlos: "BufferCrane" proceso de alto rendimiento para grúas de carga y descarga masiva. Tras la suficiente elevación de la carga, dicha carga es transferida a […]
 Dispositivo para la manipulación de bultos, del 31 de Julio de 2019, de Lippert GmbH & Co. KG: Un aparato de comunicación de radio, que comprende:
un circuito , el cual, en funcionamiento
calcula un número de secuencia usando un patrón […]
Dispositivo para la manipulación de bultos, del 31 de Julio de 2019, de Lippert GmbH & Co. KG: Un aparato de comunicación de radio, que comprende:
un circuito , el cual, en funcionamiento
calcula un número de secuencia usando un patrón […]
Procedimiento e instalación de transbordo de contenedores para almacenar y desalmacenar contenedores en un almacén de contenedores, del 19 de Junio de 2019, de AMOVA GmbH: Procedimiento para colocar, extraer o reposicionar contenedores en almacenes con estererías de gran altura o almacenes en bloques de un puerto marítimo […]
PROCEDIMIENTO PARA EL TRASLADO DE CONTENEDORES ESTANDARIZADOS ENTRE UN BUQUE PORTACONTENEDORES Y UN MUELLE, del 13 de Julio de 2017, de RUIZ VEGA, Antonio Marcos: Procedimiento para el traslado de contenedores estandarizados entre un buque portacontenedores y un muelle, medíante utilización de grúas portuarias tipo pórtico, caracterizado […]