Dispositivo de multiplicación y método para proporcionar un movimiento rotatorio.
A) Dispositivo de multiplicación, preferiblemente dispositivo motor,
para proporcionar rotación alrededor deal menos un eje de salida,
comprendiendo dicho dispositivo:
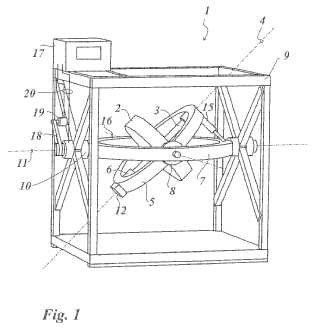
B) un cuerpo (2) montado para una rotación alrededor de un primer eje (4) y una rotación alrededor de unsegundo eje (11) y una rotación alrededor de un tercer eje (16), estando orientado el primer eje (4) conrespecto al segundo eje (11) en un ángulo de inclinación (θ), constituyendo el segundo eje (11) y/o el tercereje (16) el al menos un eje de salida de dicho dispositivo, en el que la rotación del cuerpo (2) alrededor deltercer eje (16) da origen a un cambio en el ángulo de inclinación (θ),
C) medios (15) para aplicar un par (21) al cuerpo (2) alrededor del tercer eje (16) en un sentido deaumentar el ángulo de inclinación (θ) cuando el primer eje (4) forma un ángulo de inclinación seleccionado(θ) con respecto al segundo eje (11) que es mayor que 0 grados y menor que 90 grados, y
D) medios (210) para limitar la rotación del cuerpo (2) alrededor del tercer eje (16) en un sentido dedisminuir el ángulo de inclinación (θ) de modo que el ángulo de inclinación (θ) del primer eje (4) conrespecto al segundo eje (11) permanece mayor que 0 grados y menor que 90 grados,
E) estando estructurado dicho dispositivo para permitir que una fuente de energía motriz se conecte alcuerpo (2) para hacer que el cuerpo (2) rote alrededor del primer eje (4), y
F) mediante lo cual la rotación del cuerpo (2) alrededor del primer eje (4) es a una velocidad angular (ωspin)mayor que una velocidad angular crítica (ωc) de modo que se alcanza un ángulo de inclinación (θ) constanteo decreciente, iniciando o aumentando de este modo una velocidad angular de salida (ωout) y/o un par desalida de la rotación del cuerpo (2) alrededor del segundo eje (11) y/o alrededor del tercer eje (16) comodicho al menos un eje de salida.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/003028.
Solicitante: ERKE ERKE ARASTIRMALARI VE MUHENDISLIK A.S.
Nacionalidad solicitante: Turquía.
Dirección: Halkali Merkez Mah. Basin Ekspres Yolu, No. 5/A 34303 Kucukcekmece/Istanbul TURQUIA.
Inventor/es: OZTURK,MUSTAFA NACI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16H33/10 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 33/00 Transmisiones basadas en la acumulación y liberación repetida de la energía. › de acción giroscópica, p. ej. implicando platos oscilantes, manivelas oblicuas.
PDF original: ES-2421439_T3.pdf
Fragmento de la descripción:
Dispositivo de multiplicación y método para proporcionar un movimiento rotatorio.
La presente invención se refiere a un dispositivo de multiplicación, preferiblemente un dispositivo motor, y más específicamente a un dispositivo de multiplicación, preferiblemente un dispositivo motor, que puede suministrar energía rotatoria de salida alrededor de al menos un eje de salida en respuesta a una energía rotatoria de entrada alrededor de un eje diferente. Adicionalmente, la presente invención se refiere a un método para proporcionar una rotación y a un dispositivo de ensayo para la determinación de parámetros para el diseño y funcionamiento de un dispositivo de multiplicación, preferiblemente un dispositivo motor, de este tipo y a un correspondiente método.
Cuando sobre un cuerpo que rota actúa un par alrededor de un eje perpendicular al eje de rotación, esto hace que el propio eje de rotación rote alrededor de un eje adicional que es perpendicular tanto al eje del par aplicado como al eje de rotación. Este principio es muy conocido en los dispositivos giroscópicos. El efecto se denomina precesión.
El documento WO 2005/000 623 A2 representa la técnica más cercana, que describe un sistema y un método de accionamiento. El sistema de accionamiento comprende un árbol de salida, que puede rotar alrededor de un eje de rotación, y desde el que en uso se proporciona una salida; y al menos una unidad de rotor giroscópico que está acoplada de manera operativa al árbol de salida para accionar el árbol de salida al realizar una rotación de precesión de la al menos una unidad de rotor giroscópico alrededor del eje de rotación del árbol de salida. Aunque este documento da a conocer las características definidas en las secciones A) a C) de la reivindicación 1, no da a conocer las características definidas en las secciones D) a G) de la reivindicación 1.
El objeto de la presente invención es proporcionar un dispositivo de multiplicación mejorado, preferiblemente un dispositivo motor que utilice el principio mencionado anteriormente, y un correspondiente método para proporcionar rotación mediante dicho dispositivo de multiplicación, preferiblemente un dispositivo motor.
Este objeto se soluciona por la invención a través de diferentes modos que están formulados en las reivindicaciones y que se describirán a continuación.
Los modos 1 a 4 se refieren a soluciones de dispositivo que se forman como un dispositivo de multiplicación, preferiblemente un dispositivo motor. Los modos 5 a 12 se refieren a soluciones de método que se forman como métodos para proporcionar rotación. El modo 13 se refiere a una solución de dispositivo que se forma como un dispositivo de ensayo para la determinación de parámetros para el diseño y funcionamiento de un dispositivo de multiplicación, preferiblemente un dispositivo motor según la invención. El modo 14 se refiere a una solución de método que se forma como un método para la determinación de parámetros para el diseño y funcionamiento de un dispositivo de multiplicación, preferiblemente un dispositivo motor según la invención.
Los diferentes modos 1 a 14 se indican en las reivindicaciones.
La solución según el modo 1 se obtiene mediante el objeto de la reivindicación 1. El objeto de la reivindicación 1 proporciona un dispositivo de multiplicación, preferiblemente un dispositivo motor para proporcionar rotación alrededor de al menos un eje de salida, comprendiendo el dispositivo de multiplicación, preferiblemente dispositivo motor, un cuerpo montado para una rotación alrededor de un primer eje y una rotación alrededor de un segundo eje y una rotación alrededor de un tercer eje, estando orientado el primer eje con respecto al segundo eje en un ángulo de inclinación, constituyendo el segundo eje y/o el tercer eje el al menos un eje de salida del dispositivo de multiplicación, preferiblemente dispositivo motor, en el que la rotación del cuerpo alrededor del tercer eje da origen a un cambio en el ángulo de inclinación, medios para aplicar un par al cuerpo alrededor del tercer eje en el sentido de aumentar el ángulo de inclinación cuando el primer eje forma un ángulo de inclinación seleccionado con respecto al segundo eje que es mayor que 0 grados y menor que 90 grados, y medios para limitar la rotación del cuerpo alrededor del tercer eje en un sentido de disminuir el ángulo de inclinación de modo que el ángulo de inclinación del primer eje con respecto al segundo eje permanece mayor que 0 grados y menor que 90 grados, estando estructurado el dispositivo de multiplicación para permitir que una fuente de energía motriz se conecte al cuerpo para hacer que el cuerpo rote alrededor del primer eje, y mediante lo cual la rotación del cuerpo alrededor del primer eje es a una velocidad angular mayor que una velocidad angular crítica de modo que se alcanza un ángulo de inclinación constante o decreciente, iniciando o aumentando de este modo una velocidad angular de salida y/o un par de salida de la rotación del cuerpo alrededor del segundo eje y/o alrededor del tercer eje como dicho al menos un eje de salida, mediante lo cual el cuerpo tiene una velocidad angular crítica específica de menos de 20000 revoluciones por minuto, preferiblemente para aumentar de este modo una energía de salida alrededor del al menos un eje de salida, mediante lo cual dicha velocidad angular crítica específica está definida como sigue: la velocidad angular crítica específica es la velocidad angular crítica del cuerpo cuando el ángulo de inclinación del primer eje con respecto al segundo eje es 45 grados, cuando el primer eje pasa sustancialmente a través del centro de masa del cuerpo, cuando el cuerpo está orientado de modo que el momento de inercia del cuerpo está sustancialmente maximizado, cuando, si el cuerpo no es simétrico alrededor de un plano que pasa a través del centro de masa del cuerpo y que es ortogonal al primer eje, entre las posibles orientaciones de montaje del cuerpo en el primer eje se elige aquella que da como resultado una menor distancia entre el centro de masa del cuerpo y el tercer eje, y cuando una longitud de un brazo de conexión es a) 5 mm si la masa del cuerpo es menor que 0, 1 kg, b) 25 mm si la masa del cuerpo es igual a o mayor que 0, 1 kg y menor que 100 kg, c) 50 mm si la masa del cuerpo es igual a o mayor que 100 kg y menor que 1000 kg, y d) 100 mm si la masa del cuerpo es igual a o mayor que 1000 kg, mediante lo cual dicha longitud del brazo de conexión es la distancia del punto de intersección de un plano de conexión y del primer eje al tercer eje, mediante lo cual dicho plano de conexión es un plano que es ortogonal al primer eje e interseca el cuerpo y tiene la distancia mínima al eje de inclinación.
La solución según el modo 2 se alcanza mediante el objeto de la reivindicación 26. El objeto de la reivindicación 26 proporciona un dispositivo de multiplicación, preferiblemente dispositivo motor para proporcionar una rotación alrededor de al menos un eje de salida, comprendiendo el dispositivo de multiplicación, preferiblemente dispositivo motor, un cuerpo montado para una rotación alrededor de un primer eje y una rotación alrededor de un segundo eje y una rotación alrededor de un tercer eje, estando orientado el primer eje con respecto al segundo eje en un ángulo de inclinación, constituyendo el segundo eje y/o el tercer eje el al menos un eje de salida del dispositivo de multiplicación, preferiblemente dispositivo motor, en el que la rotación del cuerpo alrededor del tercer eje da origen a un cambio en el ángulo de inclinación, medios para aplicar un par al cuerpo alrededor del tercer eje en un sentido de aumentar el ángulo de inclinación cuando el primer eje forma un ángulo de inclinación seleccionado con respecto al segundo eje que es mayor que 0 grados y menor que 90 grados, y medios para limitar la rotación del cuerpo alrededor del tercer eje en el sentido de disminuir el ángulo de inclinación de modo que el ángulo de inclinación del primer eje con respecto al segundo eje permanece mayor que 0 grados y menor que 90 grados, estando estructurado el dispositivo de multiplicación para permitir que una fuente de energía motriz se conecte al cuerpo para hacer que el cuerpo rote alrededor del primer eje, y mediante lo cual la rotación del cuerpo alrededor del primer eje es a una velocidad angular mayor que una velocidad angular crítica de modo que se alcanza un ángulo de inclinación constante o decreciente, iniciando o aumentando de este modo una velocidad angular de salida y/o un par de salida de la rotación del cuerpo alrededor del segundo eje y/o alrededor del tercer eje como dicho al menos un eje de salida, mediante lo cual un ángulo entre el vector del par aplicado al cuerpo alrededor... [Seguir leyendo]
Reivindicaciones:
1. A) Dispositivo de multiplicación, preferiblemente dispositivo motor, para proporcionar rotación alrededor de
al menos un eje de salida,
comprendiendo dicho dispositivo:
5 B) un cuerpo (2) montado para una rotación alrededor de un primer eje (4) y una rotación alrededor de un
segundo eje (11) y una rotación alrededor de un tercer eje (16) , estando orientado el primer eje (4) con
respecto al segundo eje (11) en un ángulo de inclinación (8) , constituyendo el segundo eje (11) y/o el tercer
eje (16) el al menos un eje de salida de dicho dispositivo, en el que la rotación del cuerpo (2) alrededor del
tercer eje (16) da origen a un cambio en el ángulo de inclinación (8) ,
10 C) medios (15) para aplicar un par (21) al cuerpo (2) alrededor del tercer eje (16) en un sentido de
aumentar el ángulo de inclinación (8) cuando el primer eje (4) forma un ángulo de inclinación seleccionado
(8) con respecto al segundo eje (11) que es mayor que 0 grados y menor que 90 grados, y
D) medios (210) para limitar la rotación del cuerpo (2) alrededor del tercer eje (16) en un sentido de
disminuir el ángulo de inclinación (8) de modo que el ángulo de inclinación (8) del primer eje (4) con
15 respecto al segundo eje (11) permanece mayor que 0 grados y menor que 90 grados,
E) estando estructurado dicho dispositivo para permitir que una fuente de energía motriz se conecte al
cuerpo (2) para hacer que el cuerpo (2) rote alrededor del primer eje (4) , y
F) mediante lo cual la rotación del cuerpo (2) alrededor del primer eje (4) es a una velocidad angular (Wspin)
mayor que una velocidad angular crítica (Wc) de modo que se alcanza un ángulo de inclinación (8) constante
20 o decreciente, iniciando o aumentando de este modo una velocidad angular de salida (Wout) y/o un par de
salida de la rotación del cuerpo (2) alrededor del segundo eje (11) y/o alrededor del tercer eje (16) como
dicho al menos un eje de salida,
G) mediante lo cual el cuerpo (2) tiene una velocidad angular crítica específica (Wc, spec) de menos de 20000
revoluciones por minuto, preferiblemente para aumentar de este modo una energía de salida alrededor del
25 al menos un eje de salida,
mediante lo cual dicha velocidad angular crítica específica (Wc, spec) está definida como sigue:
la velocidad angular crítica específica (Wc, spec) es la velocidad angular crítica (Wc) del cuerpo (2)
cuando el ángulo de inclinación (8) del primer eje (4) con respecto al segundo eje (11) es 45 grados,
cuando el primer eje (4) pasa sustancialmente a través del centro de masa (CM) del cuerpo (2) ,
30 cuando el cuerpo (2) está orientado de modo que el momento de inercia del cuerpo (2) está
sustancialmente maximizado,
cuando, si el cuerpo (2) no es simétrico alrededor de un plano que pasa a través del centro de masa (CM)
del cuerpo (2) y que es ortogonal al primer eje (4) , entre las posibles orientaciones de montaje del cuerpo
(2) en el primer eje (4) se elige aquella que da como resultado una menor distancia entre el centro de masa
35 (CM) del cuerpo (2) y el tercer eje (16) , y
cuando una longitud de un brazo de conexión (tc) es
a) 5 mm si la masa del cuerpo (2) es menor que 0, 1 kg,
b) 25 mm si la masa del cuerpo (2) es igual a o mayor que 0, 1 kg y menor que 100 kg,
c) 50 mm si la masa del cuerpo (2) es igual a o mayor que 100 kg y menor que 1000 kg, y
40 d) 100 mm si la masa del cuerpo (2) es igual a o mayor que 1000 kg,
mediante lo cual dicha longitud del brazo de conexión (tc) es la distancia del punto de intersección de un
plano de conexión (Pc) y del primer eje (4) al tercer eje (16) , mediante lo cual dicho plano de conexión (Pc)
es un plano que es ortogonal al primer eje (4) e interseca el cuerpo (2) y tiene la distancia mínima al eje (16) de inclinación.
2. Dispositivo según la reivindicación 1, que comprende además una fuente de energía motriz que está conectada al cuerpo (2) para hacer que el cuerpo (2) rote alrededor del primer eje (4) a dicha velocidad angular (Wspin) mayor que dicha velocidad angular crítica (Wc) .
3. Dispositivo según la reivindicación 2, que comprende además medios (17, 18, 19, 20) de retroalimentación para transmitir energía motriz desde la rotación del cuerpo (2) alrededor del al menos un eje de salida a la fuente de energía motriz.
4. Dispositivo según la reivindicación 3, en el que los medios (17, 18, 19, 20) de retroalimentación están dispuestos para transmitir suficiente energía motriz a la fuente de energía motriz para superar las pérdidas de energía que surgen a partir de la fricción debida a la rotación del cuerpo (2) alrededor del primer eje (4) cuando el ángulo de inclinación (8) y la magnitud del par aplicado alrededor del tercer eje (16) y la velocidad angular de salida (Wout) alrededor del al menos un eje de salida son constantes.
5. Dispositivo según una cualquiera de las reivindicaciones anteriores, que comprende además medios para controlar la fuente de energía motriz para hacer que el cuerpo (2) rote alrededor del primer eje (4) a dicha velocidad angular (Wspin) mayor que dicha velocidad angular crítica (Wc) .
6. Dispositivo según una cualquiera de las reivindicaciones anteriores, en el que los medios de aplicación de par (15) están dispuestos para aplicar el par (21) al cuerpo (2) alrededor del tercer eje (16) cuando el ángulo de inclinación seleccionado (8) es mayor que 10 grados y menor que 80 grados.
7. Dispositivo según una cualquiera de las reivindicaciones anteriores, que comprende además medios para controlar la magnitud del par (21) aplicado por los medios (15) de aplicación de par.
8. Dispositivo según una cualquiera de las reivindicaciones anteriores, en el que los medios (210) limitantes están dispuestos para limitar la rotación del cuerpo (2) alrededor del tercer eje (16) de modo que el ángulo de inclinación (8) del primer eje (4) con respecto al segundo eje (11) es mayor que 10 grados y menor que 80 grados.
9. Dispositivo según una cualquiera de las reivindicaciones anteriores, que comprende además medios para ajustar el ángulo de inclinación (8) .
10. Dispositivo según la reivindicación 9, que comprende además medios para seleccionar una velocidad angular de salida deseada (Wout) alrededor del al menos un eje de salida y hacer que los medios de ajuste ajusten el ángulo de inclinación (8) dependiendo de la velocidad angular de salida seleccionada (Wout) .
11. Dispositivo según la reivindicación 9 o reivindicación 10, que comprende además medios para seleccionar un par de salida deseado del dispositivo y ajustar el ángulo de inclinación (8) dependiendo del par de salida seleccionado.
12. Dispositivo según una cualquiera de las reivindicaciones anteriores, en el que los medios (15) para aplicar un par (21) alrededor del tercer eje (16) comprenden un resorte.
13. Dispositivo según una cualquiera de las reivindicaciones anteriores, en el que los medios (15) para aplicar un par (21) alrededor del tercer eje (16) comprenden uno o más de: un gato hidráulico, un gato neumático, un gato electromagnético.
14. Dispositivo según una cualquiera de las reivindicaciones anteriores, en el que los medios (210) limitantes están dispuestos para evitar cualquier rotación del cuerpo (2) alrededor del tercer eje (16) en el sentido de disminuir el ángulo de inclinación (8) .
15. Dispositivo según una cualquiera de las reivindicaciones anteriores, en el que los medios (15) para aplicar un par (21) alrededor del tercer eje (16) sirven adicionalmente como medios (210) limitantes.
16. Dispositivo según una cualquiera de las reivindicaciones anteriores, en el que los medios (210) limitantes comprenden un tope.
17. Dispositivo según una cualquiera de las reivindicaciones anteriores, en el que el primer eje (4) pasa sustancialmente a través del centro de masa (CM) del cuerpo (2) .
18. Dispositivo según una cualquiera de las reivindicaciones anteriores, en el que el segundo eje (11) pasa sustancialmente a través del centro de masa (CM) del cuerpo (2) .
19. Dispositivo según una cualquiera de las reivindicaciones anteriores, en el que el primer eje (4) y el segundo eje (11) se intersecan.
20. Dispositivo según una cualquiera de las reivindicaciones 1 a 18, en el que el primer eje (4) y el segundo eje
(11) no se intersecan y el ángulo de inclinación (8) está definido como el ángulo agudo entre el primer eje
(4) y el segundo eje (11) cuando se ven a lo largo de la dirección de la línea más corta que une el primer eje (4) y el segundo eje (11) .
21. Dispositivo según una cualquiera de las reivindicaciones anteriores, en el que el cuerpo (2) es sustancialmente simétrico de manera cilíndrica alrededor del primer eje (4) .
22. Dispositivo según una cualquiera de las reivindicaciones 1 a 21, en el que el cuerpo (2) comprende un cubo y una malla y un borde de forma de anillo.
23. Dispositivo según una cualquiera de las reivindicaciones anteriores, en el que el cuerpo (2) está hecho de un material que tiene un módulo de elasticidad por encima de 70 GPa, preferiblemente por encima de 100 GPa.
24. Dispositivo según una cualquiera de las reivindicaciones anteriores, que comprende además medios para montar dicho dispositivo.
25. Dispositivo según una cualquiera de las reivindicaciones anteriores, que comprende además una o más masas de equilibrio montadas para la rotación alrededor del segundo eje.
26. Dispositivo según las secciones A) a F) de la reivindicación 1, preferiblemente según una cualquiera de las reivindicaciones anteriores, en el que un ángulo entre el vector del par (21) aplicado al cuerpo (2) alrededor del tercer eje (16) y el vector de la velocidad angular de salida (Wout) alrededor del segundo eje (11) está entre 85 grados y 93 grados, preferiblemente cerca de 90 grados.
27. Dispositivo según una cualquiera de las reivindicaciones anteriores, en el que el cuerpo (2) está montado en un árbol (3, 30) que está hecho de un material con un módulo de elasticidad por encima de 70 GPa, preferiblemente por encima de 100 GPa.
28. Dispositivo según una cualquiera de las reivindicaciones anteriores, en el que un árbol (110) de salida a lo largo del al menos un eje de salida está hecho de un material con un módulo de elasticidad por encima de 70 GPa, preferiblemente por encima de 100 GPa.
29. Dispositivo según una cualquiera de las reivindicaciones anteriores, en el que las partes del dispositivo, sobre las que actúan fuerzas variables están hechas de uno o más materiales con un módulo de elasticidad por encima de 70 GPa, preferiblemente por encima de 100 GPa.
30. Dispositivo según las secciones A) a F) de la reivindicación 1, preferiblemente según una cualquiera de las reivindicaciones anteriores, que comprende además uno o más sensores para medir valores de uno o más de los siguientes parámetros:
la rotación alrededor del primer eje (4) y/o del segundo eje (11) y/o del tercer eje (16) , la velocidad angular de la rotación alrededor del primer eje (4) y/o del segundo eje (11) y/o del tercer eje (16) , la posición del cuerpo (2) y/o el primer eje (4) y/o el segundo eje (11) y/o el tercer eje (16) , el par de la rotación alrededor del primer eje (4) y/o del segundo eje (11) y/o del tercer eje (16) , una fuerza.
31. Dispositivo según las secciones A) a F) de la reivindicación 1, preferiblemente según una cualquiera de las reivindicaciones anteriores, que comprende además medios para limitar mecánicamente la rotación del cuerpo (2) alrededor del eje (16) de inclinación en ambos sentidos entre un valor de ángulo límite inferior y un valor de ángulo límite superior y medios para ajustar estos valores de ángulo límite durante el funcionamiento de dicho dispositivo, a un valor de ángulo límite inferior elegido mayor que 0 grados y menor que 90 grados y un valor de ángulo límite superior mayor que el valor de ángulo límite inferior elegido y menor que 90 grados.
32. Dispositivo según la reivindicación 31, en el que los medios para limitar mecánicamente la rotación del cuerpo (2) son uno o más topes.
33. Conjunto de dos o más dispositivos de multiplicación, preferiblemente dispositivos motores, cada uno de los cuales comprende un dispositivo según una cualquiera de las reivindicaciones anteriores, en combinación con medios para hacer que cada uno de dichos dispositivos rote a sustancialmente la misma velocidad de rotación pero a diferentes ángulos de fase y medios para combinar la velocidad angular de salida (Wout) y/o el par de salida de dichos dispositivos.
34. Vehículo impulsado por un dispositivo según una cualquiera de las reivindicaciones 1 a 32 o por un conjunto según la reivindicación 33.
35. Vehículo según la reivindicación 34 en forma de vehículo de carretera.
36. Vehículo según la reivindicación 34 en forma de aeronave.
37. Vehículo según la reivindicación 34 en forma de vehículo acuático.
38. Generador de electricidad que comprende un dispositivo según una cualquiera de las reivindicaciones 1 a 32 o un conjunto según la reivindicación 33.
39. a) Método para proporcionar rotación alrededor de al menos un eje de salida, comprendiendo el método:
b) montar un cuerpo (2) para una rotación alrededor de un primer eje (4) y una rotación alrededor de un segundo eje (11) y una rotación alrededor de un tercer eje (16) , estando orientado el primer eje (4) con respecto al segundo eje (11) con un ángulo de inclinación (8) , constituyendo el segundo eje (11) y/o el tercer eje (16) el al menos un eje de salida, en el que la rotación del cuerpo (2) alrededor del tercer eje (16) da origen a un cambio en el ángulo de inclinación (8) ,
c) hacer rotar el cuerpo (2) alrededor del primer eje (4) a una velocidad angular (Wspin) mayor que una velocidad angular crítica ( Wc) ,
d) aplicar un par (21) al cuerpo (2) alrededor del tercer eje (16) en un sentido de aumentar el ángulo de inclinación (8) cuando el primer eje (4) forma un ángulo de inclinación seleccionado (8) con respecto al segundo eje (11) que es mayor que 0 grados y menor que 90 grados, y
e) limitar la rotación del cuerpo (2) alrededor del tercer eje (16) en un sentido de disminuir el ángulo de inclinación (8) de modo que el ángulo de inclinación (8) del primer eje (4) con respecto al segundo eje (11) permanece mayor que 0 grados y menor que 90 grados,
f) de modo que se alcanza un ángulo de inclinación (8) constante o decreciente, iniciando o aumentando de este modo una velocidad angular de salida (Wout) y/o un par de salida de la rotación del cuerpo (2) alrededor del segundo eje (11) y/o alrededor del tercer eje (16) como dicho al menos un eje de salida,
g) mediante lo cual el método comprende además:
utilizar un cuerpo (2) con una velocidad angular crítica específica (Wc, spec) de menos de 20000 revoluciones por minuto, para preferiblemente aumentar de este modo una energía de salida alrededor del al menos un eje de salida,
mediante lo cual dicha velocidad angular crítica específica (Wc, spec) está definida como sigue:
la velocidad angular crítica específica (Wc, spec) es la velocidad angular crítica (Wc) del cuerpo (2)
cuando el ángulo de inclinación (8) del primer eje (4) con respecto al segundo eje (11) es 45 grados,
cuando el primer eje (4) pasa sustancialmente a través del centro de masa (CM) del cuerpo (2) ,
cuando el cuerpo (2) está orientado de modo que el momento de inercia del cuerpo (2) está sustancialmente maximizado,
cuando, si el cuerpo (2) no es simétrico alrededor de un plano que pasa a través del centro de masa (CM) del cuerpo (2) y que es ortogonal al primer eje (4) , entre las posibles orientaciones de montaje del cuerpo (2) en el primer eje (4) se elige aquella que da como resultado una menor distancia entre el centro de masa (CM) del cuerpo (2) y el tercer eje (16) , y
cuando la longitud de un brazo de conexión (tc) es a) 5 mm si la masa del cuerpo (2) es menor que 0, 1 kg, b) 25 mm si la masa del cuerpo (2) es igual a o mayor que 0, 1 kg y menor que 100 kg, c) 50 mm si la masa del cuerpo (2) es igual a o mayor que 100 kg y menor que 1000 kg, y
d) 100 mm si la masa del cuerpo (2) es igual a o mayor que 1000 kg, mediante lo cual dicha longitud del brazo de conexión (tc) es la distancia del punto de intersección de un plano de conexión (Pc) y del primer eje (4) al tercer eje (16) , mediante lo cual dicho plano de conexión (Pc) es un plano que es ortogonal al primer eje (4) e interseca el cuerpo (2) y tiene la distancia mínima al eje (16) de inclinación. 10 40. Método según la reivindicación 39, que comprende además:
proporcionar un par adicional, externo al cuerpo (2) alrededor del segundo eje para aplicar una aceleración inicial.
41. Método según una cualquiera de las reivindicaciones 39 y 40, que comprende además:
controlar la fuente de energía motriz con el objeto de hacer que el cuerpo (2) rote alrededor del primer eje 15 (4) a dicha velocidad angular (Wspin) mayor que la velocidad angular crítica (Wc) .
42. Método según una cualquiera de las reivindicaciones 39 a 41, que comprende además:
seleccionar el ángulo de inclinación seleccionado (8) mayor que 10 grados y menor que 80 grados.
43. Método según una cualquiera de las reivindicaciones 39 a 42, que comprende además:
controlar la magnitud del par (21) aplicado al cuerpo (2) alrededor del tercer eje (16) . 20 44. Método según una cualquiera de las reivindicaciones 39 a 43, que comprende además:
limitar la rotación del cuerpo (2) alrededor del tercer eje (16) de modo que el ángulo de inclinación (8) del primer eje (4) con respecto al segundo eje (11) es mayor que 10 grados y menor que 80 grados.
45. Método según una cualquiera de las reivindicaciones 39 a 44, que comprende además:
ajustar el ángulo de inclinación (8) . 25 46. Método según la reivindicación 45, que comprende además:
generar una velocidad angular de salida deseada (Wout) alrededor de uno del al menos un eje de salida mediante el ajuste del ángulo de inclinación (8) .
47. Método según la reivindicación 45, que comprende además:
generar un par de salida deseado alrededor de uno del al menos un eje de salida mediante el ajuste del 30 ángulo de inclinación (8) .
48. Método según una cualquiera de las reivindicaciones 39 a 47, que comprende además:
ajustar la velocidad angular (Wspin) del cuerpo (2) alrededor del primer eje (4) .
49. Método según la reivindicación 48, que comprende además:
50. Método según la reivindicación 48, que comprende además:
generar un par de salida deseado alrededor de uno del al menos un eje de salida mediante el ajuste de la velocidad angular (Wspin) del cuerpo (2) alrededor del primer eje (4) .
51. Método según cualquiera de las reivindicaciones 39 a 50, que comprende además: ajustar el par (21) aplicado al cuerpo (2) alrededor del tercer eje (16) .
52. Método según la reivindicación 51, que comprende además:
generar una velocidad angular de salida deseada (Wout) alrededor de uno del al menos un eje de salida mediante el ajuste del par (21) aplicado al cuerpo (2) alrededor del tercer eje (16) .
53. Método según la reivindicación 51, que comprende además:
generar un par de salida deseado alrededor de uno del al menos un eje de salida mediante el ajuste del par aplicado al cuerpo (2) alrededor del tercer eje (16) .
54. Método según una cualquiera de las reivindicaciones 39 a 53, en el que la limitación de la rotación del cuerpo (2) alrededor del tercer eje (16) comprende además:
evitar cualquier rotación del cuerpo (2) alrededor del tercer eje (16) en el sentido de disminuir el ángulo de inclinación (8) .
55. Método según una cualquiera de las reivindicaciones 39 a 54, que comprende además:
utilizar parte de la energía de rotación proporcionada alrededor del al menos un eje de salida para llevar a cabo la rotación del cuerpo (2) alrededor del primer eje (4) cuando el ángulo de inclinación (8) y la magnitud del par (21) aplicado alrededor del tercer eje (16) y la velocidad angular de salida (Wout) alrededor del al menos un eje de salida son constantes.
56. Método según la reivindicación 55, en el que la cantidad de energía de rotación así utilizada es suficiente para superar las pérdidas de energía a partir de la fricción debida a la rotación del cuerpo (2) alrededor del primer eje (4) .
57. Método según las secciones a) a f) de la reivindicación 39, preferiblemente según una cualquiera de las reivindicaciones 39 a 56, que comprende además:
aplicar el par (21) al cuerpo (2) alrededor del tercer eje (16) aplicando el par exclusivamente mediante el peso del cuerpo (2) o aplicando el par mediante medios externos y adicionalmente mediante el peso del cuerpo (2) .
58. Método según las secciones a) a f) de la reivindicación 39, preferiblemente según una cualquiera de las reivindicaciones 39 a 57, que comprende además: medir valores de uno o más de los siguientes parámetros: la rotación alrededor del primer eje (4) y/o el segundo eje (11) y/o el tercer eje (16) , la velocidad angular de la rotación alrededor del primer eje (4) y/o el segundo eje (11) y/o el tercer eje (16) , la posición del cuerpo (2) y/o el primer eje (4) y/o el segundo eje (11) y/o el tercer eje (16) ,
el par de la rotación alrededor del primer eje (4) y/o el segundo eje (11) y/o el tercer eje (16) , una fuerza.
59. Método según las secciones a) a f) de la reivindicación 39, preferiblemente según una cualquiera de las reivindicaciones 39 a 58, que comprende además:
generar una velocidad angular de salida deseada (Wout) alrededor de uno del al menos un eje de salida 35 mediante el ajuste de la velocidad angular (Wspin) del cuerpo (2) alrededor del primer eje (4) .
limitar mecánicamente la rotación del cuerpo (2) alrededor del eje (16) de inclinación en ambos sentidos entre un valor de ángulo límite inferior y un valor de ángulo límite superior y ajustar, mientras se proporciona rotación durante el funcionamiento del dispositivo de multiplicación, preferiblemente un dispositivo motor, estos valores de ángulo límite a un valor de ángulo límite inferior elegido mayor que 0 grados y menor que 90 grados y un valor de ángulo límite superior mayor que el valor de ángulo límite inferior elegido y menor que 90 grados.
60. Método según las secciones a) a f) de la reivindicación 39, preferiblemente según una cualquiera de las reivindicaciones 39 a 59, que comprende además:
aumentar una energía de salida suministrada alrededor del al menos un eje de salida mediante la disminución de una distancia entre el centro de masa (CM) del cuerpo (2) y el segundo eje (11) .
61. Método según las secciones a) a f) de la reivindicación 39, preferiblemente según una cualquiera de las reivindicaciones 39 a 60, que comprende además:
aumentar una energía de salida suministrada alrededor del al menos un eje de salida mediante la disminución de una variación de un ángulo entre un vector normal de un primer plano del bastidor y un vector normal de un segundo plano del bastidor, estando definido el plano del bastidor como un plano que pasa a través de tres puntos no lineales de un bastidor en el que está montado el dispositivo de multiplicación, preferiblemente un dispositivo motor.
62. Método según la reivindicación 61, que comprende además:
mantener dicha variación menor que 5 grados.
63. Método según las secciones a) a f) de la reivindicación 39, preferiblemente según una cualquiera de las reivindicaciones 39 a 62, que comprende además:
aumentar una energía de salida suministrada alrededor del al menos un eje de salida mediante la disminución de una variación de un ángulo entre un vector de la velocidad angular de salida (Wout) alrededor del al menos un eje de salida y un vector normal de un plano del bastidor, estando definido el plano del bastidor como un plano que pasa a través de tres puntos no lineales de un bastidor en el que está montado el dispositivo de multiplicación, preferiblemente un dispositivo motor.
64. Método según la reivindicación 63, que comprende además:
mantener dicha variación menor que 5 grados.
65. Método según las secciones a) a f) de la reivindicación 39, preferiblemente según una cualquiera de las reivindicaciones 39 a 64, que comprende además:
aumentar una energía de salida suministrada alrededor del al menos un eje de salida mediante la disminución de una variación en un ángulo entre el vector de la velocidad angular del movimiento angular del cuerpo (2) alrededor del primer eje (4) y un vector normal de un plano del cuerpo, estando definido el plano del cuerpo como un plano que pasa a través de tres puntos no lineales del cuerpo (2) .
66. Método según la reivindicación 65, que comprende además:
mantener dicha variación menor que 5 grados.
Patentes similares o relacionadas:
TRANSMISION CONTINUAMENTE VARIABLE., del 16 de Julio de 2005, de GYRO HOLDINGS LIMITED: Una transmisión que comprende: un alojamiento o soporte fijo ; un miembro de entrada; un árbol de torsión; un miembro de salida dispuesto […]