Métodos y sistemas para aliviar cargas en aerogeneradores marinos.
Métodos y sistemas para aliviar cargas en aerogeneradores marinos.
En caso de mal funcionamiento del sistema de medición de cargas, usan uno de los siguientes vectores de ángulo de paso para el cálculo del comando de ángulo de paso de cada pala:
- el vector de ángulo de paso que está siendo aplicado al mismo tiempo en un aerogenerador del parque eólico;
- un valor medio de los vectores de ángulo de paso que están siendo aplicados al mismo tiempo en un grupo de aerogeneradores del parque eólico;
- el vector de ángulo de paso resultante de una ley de control, obtenida a partir de registros históricos del aerogenerador cuando el sistema de medición de cargas funcionaba correctamente, definiendo el vector de ángulo de paso como una función de al menos la velocidad del viento V, si los anteriores vectores de ángulo de paso no están disponibles.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201200239.
Solicitante: GAMESA INNOVATION & TECHNOLOGY, S.L.
Nacionalidad solicitante: España.
Inventor/es: PLANO MORRILLO,Eugenio, FERNANDEZ ROMERO,Ignacio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F03D7/04 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F03 MAQUINAS O MOTORES DE LIQUIDOS; MOTORES DE VIENTO, DE RESORTES, O DE PESOS; PRODUCCION DE ENERGIA MECANICA O DE EMPUJE PROPULSIVO O POR REACCION, NO PREVISTA EN OTRO LUGAR. › F03D MOTORES DE VIENTO. › F03D 7/00 Control de los motores de viento (alimentación o distribución de energía eléctrica H02J, p. ej. disposiciones para ajustar, eliminar o compensar la potencia reactiva en las redes H02J 3/18; control de generadores eléctricos H02P, p. ej. disposiciones para el control de generadores eléctricos con el propósito de obtener las características deseadas en la salida H02P 9/00). › Control automático; Regulación.
Fragmento de la descripción:
METODOS Y SISTEMAS PARA ALIVIAR CARGAS EN
AEROGENERADORES MARINOS
CAMPO DE LA INVENCIÓN
5
La invención se refiere a métodos y sistemas para aliviar las cargas
generadas por las asimetrías de viento en aerogeneradores y, más en particular,
en aerogeneradores marinos.
10 ANTECEDENTES
Cuando un pala de aerogenerador barre todo el 'disco del rotorquot;
experimenta cambios en la velocidad y dirección del viento, como resultado de la
cortadura del viento, la sombra de la torre, la desalineación en guiñada y la
15 turbulencia. A medida en que los tamaños de los rotores aumentan con respecto a
los tamaños típicos de los remolinos turbulentos, la importancia de las variaciones
turbulentas de la velocidad del viento a través del disco del rotor se hace mayor.
Estas variaciones resultan en un gran componente de las cargas de la pala
por cada vuelta, o 1 P, junto con los armónicos de esta frecuencia, es decir, 2P, 3P,
2 o 4P y así sucesivamente. En un rotor de tres palas, estos componentes de carga
tienen un desfase de 120° entre las tres palas, con el resultado de que el buje del
rotor y el resto de la estructura experimentarán los armónicos de 3P, 6P, etc., pero
el componente 1 P y los otros armónicos tienden a cancelarse.
Ahora bien, esta cancelación se basa en suposiciones de estacionariedad y
2 5 linealidad, pero cuando los aerogeneradores se hacen más grandes con respecto
a las escalas de longitud de la turbulencia, estas suposiciones resultan menos
válidas.
Esto significa que las cargas asimétricas que resultan de los componentes
1 P y los armónicos ya no se anulan y que los componentes de carga a estas
3º frecuencias pueden contribuir muy significativamente a cargas de fatiga en el buje
del rotor, los ejes, los cojinetes de guiñada, la torre, etc.
Para reducir esos efectos perjudiciales, la técnica anterior enseña el uso de
un control individual del ángulo de paso añadido al control colectivo del ángulo de
paso y también del control del ángulo de guiñada. Los comandos del ángulo de
paso y del ángulo de guiñada para reducir dichas cargas asimétricas se calculan
5 utilizando mediciones de dichas cargas o de los desplazamientos causados por
ellas.
Los componentes de carga 1 P son particularmente significativos en los
aerogeneradores grandes, y, en principio, debería ser posible reducirlos por medio
de la acción individual sobre el ángulo de paso de las palas en la frecuencia 1 P,
1 o con un desfase de 120° entre las tres palas. Esta acción individual sobre el ángulo
de paso en la frecuencia 1 P puede ser calculada por un algoritmo de control que
utiliza, como entrada, las cargas de la pala fuera del plano.
Un ejemplo de esta técnica anterior se puede encontrar en US.
2006/002792 donde se describe un método para reducir las cargas y para
15 proporcionar alineamiento en guiñada en un aerogenerador que incluye la
medición de desplazamientos o momentos resultantes de cargas asimétricas en el
aerogenerador. Estos momentos o desplazamientos medidos se utilizan para
determinar la contribución del ángulo de paso que tratará de reducir o contrarrestar
la carga asimétrica del rotor y lograr una fácil alineación del sistema de orientación.
2 o Si los dispositivos de medición de dichos desplazamientos o momentos
fallan y por lo tanto dicha acción individual sobre el ángulo de paso no puede ser
implementada, la técnica anterior sugiere la operación del aerogenerador a un
nivel de producción menor para la reducción de la carga asimétrica del rotor hasta
que el fallo sea reparado.
2 5 En el caso de los aerogeneradores marinos, la reparación de los aparatos
de medición se puede retrasar durante largos períodos de tiempo lo que implica
pérdidas importantes de producción.
SUMARIO DE LA INVENCIÓN
30
Es un objeto de esta invención proporcionar métodos y sistemas de control para mejorar la producción de energía de los aerogeneradores marinosque tienen un sistema individual de control del ángulo de paso para contrarrestar
cargas asimétricas del rotor cuando falla el sistema de medición de cargas
utilizado por dicho sistema individual de control del ángulo de paso.
Es otro objeto de la presente invención proporcionar métodos y sistemas
5 de control para aliviar las cargas de los aerogeneradores marinos que tienen un
sistema individual de control del ángulo de paso para contrarrestar cargas
asimétricas del rotor cuando falla el sistema de medición de cargas utilizado por
dicho sistema individual de control del ángulo de paso.
En un aspecto, estos y otros objetos se consiguen con un método de
1 o control que comprende el paso de usar, en caso de mal funcionamiento del
sistema de medición de cargas, el siguiente vector de ángulo de paso para el
cálculo del comando de ángulo de paso de cada pala:
- el vector de ángulo de paso que está siendo aplicado al mismo tiempo
en un aerogenerador del parque eólico en el que funciona correctamente el
15 sistema de medición de cargas (preferiblemente el aerogenerador más cercano)
o un valor medio de los vectores de ángulo de paso que están siendo aplicados
al mismo tiempo en un grupo de aerogeneradores del parque eólico en los que
funciona correctamente el sistema de medición de cargas;
- el vector de ángulo de paso resultante de una ley de control, obtenida a
2 o partir de los registros históricos del aerogenerador cuando el sistema de
medición de cargas funcionaba correctamente, definiendo el vector de ángulo de
paso como una función de al menos la velocidad del viento V, si los anteriores
vectores de ángulo de paso no están disponibles.
En otro aspecto, los objetos antes mencionados se consiguen con un
2 5 sistema de control que está dispuesto para realizar una regulación del
aerogenerador de acuerdo con una curva de potencia predeterminada para
velocidades de viento por debajo de la velocidad de corte del viento Vout
incluyendo una regulación individual del ángulo de paso de cada basada en un
sistema de medición de cargas, en el que el sistema de control también está
30 dispuesto para realizar una regulación alternativa, en caso de mal
funcionamiento de dicho sistema de medición de cargas, de acuerdo con unacurva de potencia alternativa, reduciendo la producción de energía con respecto
a la curva predeterminada de potencia, e incluyendo un control individual
alternativo del ángulo de paso para contrarrestar cargas asimétricas del rotor
utilizando el siguiente vector de ángulo de paso para el cálculo del comando de
ángulo de paso de cada pala:
5 -el vector de ángulo de paso aplicado al mismo tiempo en un
aerogenerador del parque eólico en el que funciona correctamente el sistema de
medición de cargas (preferiblemente el aerogenerador más cercano) o un valor
medio de los vectores de ángulo de paso que se aplican al mismo tiempo en un
grupo de aerogeneradores del parque eólico en los que funciona correctamente
10 el sistema de medición de cargas;
- el vector de ángulo de paso resultante de una ley de control, obtenida a
partir de los registros históricos del aerogenerador cuando el sistema de
medición de cargas funcionaba correctamente, definiendo el vector de ángulo de
paso como una función de al menos la velocidad del viento V, si los anteriores
15 vectores de ángulo de paso no están disponibles.
El vector de ángulo de paso a ser aplicado en un aerogenerador cuando
su sistema de medición de cargas falla puede ser obtenido del controlador del
parque eólico en los tres casos mencionados, o de otro aerogenerador (si están
provistos de medios de comunicación) o puede ser obtenido en el propio
20 aerogenerador (en el caso del vector de ángulo de paso resultante de una ley de
control) .
Otras características deseables y ventajas de dichos métodos y sistemas
de control de aerogeneradores marinos se harán evidentes a partir de la
descripción subsiguiente detallada de la invención y de las reivindicaciones
2 5 adjuntas, en relación con los dibujos adjuntos.
BREVE DESCRIPCIÓN DE LAS FIGURAS
La Figura 1 es una vista esquemática en sección lateral esquemática de
3 o un aerogenerador.
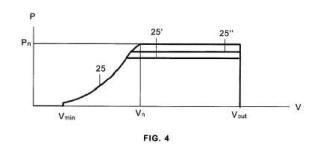
La Figura 2 muestra una curva de potencia típica de un aerogenerador.
La Figura 3 es un diagrama que muestra el comando del ángulo de paso
de la regulación colectiva del ángulo de paso y el comando del ángulo de paso
que resulta de la adición de una regulación cíclica en...
Reivindicaciones:
1. Método de control de un aerogenerador perteneciente a un parque
eólico marino que tienen un sistema individual de control del ángulo de paso
5 para contrarrestar cargas asimétricas basado en un sistema de medición de
cargas, caracterizado porque comprende el paso de usar, en caso de mal
funcionamiento del sistema de medición de cargas, el siguiente vector de ángulo
de paso para el cálculo del comando de ángulo de paso de cada pala:
- el vector de ángulo de paso que está siendo aplicado al mismo tiempo
1 o en un aerogenerador del parque eólico en el que funciona correctamente el
sistema de medición de cargas o un valor medio de los vectores de ángulo de
paso que están siendo aplicados al mismo tiempo en un grupo de
aerogeneradores del parque eólico en los que funciona correctamente el sistema
de medición de cargas;
15 -el vector de ángulo de paso resultante de una ley de control, obtenida a
partir de registros históricos del aerogenerador cuando el sistema de medición
de cargas funcionaba correctamente, definiendo el vector de ángulo de paso
como una función de, al menos, la velocidad del viento V, si los anteriores
vectores de ángulo de paso no están disponibles.
20
2. Método de control de un aerogenerador según la reivindicación 1, en
el que el vector de ángulo de paso usado el aerogenerador es el vector de
ángulo de paso que está siendo aplicado en el aerogenerador más cercano.
2 5 3. Método de control de un aerogenerador según la reivindicación 1, en el
que dicha ley de control es una función de la velocidad del viento y una o más de
las siguientes variables:
- la dirección del viento;
- la cortadura del viento;
3º -la posición de guiñada;
- el período del año.
4. Sistema de control de un aerogenerador perteneciente a un parque
eólico marino:
- estando conectado el sistema de control a un sistema de medición de
cargas y a dispositivos de medida de, al menos, la velocidad del viento V, la
5 dirección del viento, el ángulo de paso B, la posición del acimut ljlde cada pala;
- estando conectado el sistema de control a, al menos, los actuadores de
control individual del ángulo de paso de las palas y al actuador de control del par
motor;
- teniendo el sistema de control medios de comunicación con el
1º controlador del parque eólico;
- estando dispuesto el sistema de control para realizar una regulación del
aerogenerador de acuerdo con una curva de potencia predeterminada (25) para
velocidades de viento por debajo de la velocidad de corte del viento Vaut
incluyendo una regulación individual del ángulo de paso de cada pala basada en
15 un sistema de medición de cargas;
caracterizado porque el sistema de control también está dispuesto para
realizar una regulación alternativa, en caso de mal funcionamiento de dicho
sistema de medición de cargas, de acuerdo con una curva de potencia
alternativa (25quot;}, reduciendo la producción de energía con respecto a la curva
2º predeterminada de potencia (25) , e incluyendo un control individual alternativo
del ángulo de paso para contrarrestar cargas asimétricas del rotor utilizando el
siguiente vector de ángulo de paso para el cálculo del comando de ángulo de
paso de cada pala:
- el vector de ángulo de paso que está siendo aplicado al mismo tiempo
2 5 en un aerogenerador del parque eólico en el que funciona correctamente el
sistema de medición de cargas o un valor medio de los vectores de ángulo de
paso que están siendo aplicados al mismo tiempo en un grupo de
aerogeneradores del parque eólico en los que funciona correctamente el sistema
de medición de cargas;
30 -el vector de ángulo de paso resultante de una ley de control, obtenida a
partir de registros históricos del aerogenerador cuando el sistema de mediciónde cargas funcionaba correctamente, definiendo el vector de ángulo de paso
como una función de al menos la velocidad del viento vectores de ángulo de paso no están disponibles. V, si los anteriores
5 5. Sistema de control según la reivindicación 4, en el que el vector de ángulo de paso usado en el aerogenerador es el vector de ángulo de paso que está siendo aplicado en el aerogenerador más cercano, que se recibe desde el controlador del parque eólico.
1º 6. Sistema de control según la reivindicación 4, en el que el vector de ángulo de paso usado en el aerogenerador es el valor medio de los vectores de ángulo de paso que están siendo aplicados al mismo tiempo en un grupo de aerogeneradores del parque eólico que se recibe desde el controlador del parque eólico.
15 20 7. Sistema de control según la reivindicación 4, comprendiendo además medios directos de comunicación con todos los aerogeneradores pertenecientes al parque eólico en el que el vector de ángulo de paso usado en el aerogenerador es el vector de ángulo de paso que está siendo aplicado en el aerogenerador más cercano, que se recibe desde él.
8. Sistema de control según la reivindicación 4, en el que dicha ley de control está almacenada en el controlador del parque eólico.
2 5 9. Sistema de control según la reivindicación 4, en el que dicha ley de control está almacenada en los medios de almacenamiento del sistema de control.
3 o
10. Sistema de control según cualquiera de las reivindicaciones 8-9, en el que dicha ley de control es una función de la velocidad del viento y una o más de las siguientes variables: -la dirección del viento; -la cortadura del viento;- la posición de guiñada; -el período del año.
11. Aerogenerador marino que comprende un sistema de control según cualquiera de las reivindicaciones 4-10.
Patentes similares o relacionadas:
Aparato y procedimiento para hacer funcionar una turbina eólica en condiciones de voltaje de red de suministro bajo, del 22 de Julio de 2020, de VESTAS WIND SYSTEMS A/S: Generador de turbina eólica que incluye un rotor que tiene palas de paso variable conectadas de forma funcional a él, un generador AC para suministrar electricidad […]
Procedimiento y sistema para el control de una turbina eólica, del 15 de Julio de 2020, de Siemens Gamesa Renewable Energy Service GmbH: Procedimiento para el control de una turbina eólica en el que, en un circuito de regulación cerrado , se determina un valor de ajuste para […]
Control de un sistema de turbina eólica multirrotor que usa un controlador central para calcular objetivos de control local, del 1 de Julio de 2020, de VESTAS WIND SYSTEMS A/S: Un sistema de control para un sistema de turbina eólica que comprende una pluralidad de módulos de turbina eólica montados en una estructura de soporte […]
Procedimiento para hacer funcionar una instalación de energía eólica, así como instalación de energía eólica, del 1 de Julio de 2020, de Wobben Properties GmbH: Procedimiento para hacer funcionar una instalación de energía eólica con un generador para suministrar potencia eléctrica a una red eléctrica, donde la instalación […]
Aerogenerador con receptor de datos, del 24 de Junio de 2020, de GENERAL ELECTRIC COMPANY: Parque eólico , que comprende por lo menos dos aerogeneradores ; y un receptor que es un centro de control remoto, comprendiendo cada una de los […]
Control de turbina eólica utilizando un controlador de señales, del 24 de Junio de 2020, de GENERAL ELECTRIC COMPANY: Un sistema de control de una turbina eólica , que comprende: un sensor configurado para proporcionar una señal indicativa de uno o más parámetros de la turbina […]
Sistema y procedimiento para controlar una corriente de secuencia negativa en un generador de un aerogenerador, del 13 de Mayo de 2020, de GENERAL ELECTRIC COMPANY: Procedimiento para controlar un sistema de corriente eléctrica conectado a una red eléctrica , presentando el sistema de corriente eléctrica […]
 Disposición para la supervisión de un parque eólico, del 29 de Abril de 2020, de Siemens Gamesa Renewable Energy Service GmbH: Disposición de una pluralidad de turbinas eólicas (11, 11a, 11b, 11c), una central de supervisión , un módulo de cálculo , un módulo […]
Disposición para la supervisión de un parque eólico, del 29 de Abril de 2020, de Siemens Gamesa Renewable Energy Service GmbH: Disposición de una pluralidad de turbinas eólicas (11, 11a, 11b, 11c), una central de supervisión , un módulo de cálculo , un módulo […]