MÉTODO PARA LA MODELIZACIÓN DE PARES ESTEREOSCÓPICOS TRANSVERSALES EN PROCESOS FOTOGRAMÉTRICOS.
Método para la modelización de pares estereoscópicos transversales en procesos fotogramétricos,
que comprende:
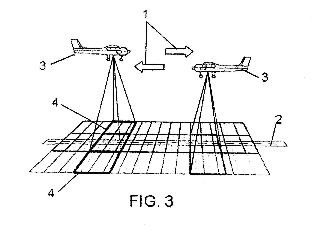
- Diseño de una línea de vuelo (1) fotogramétrico aproximadamente coincidente en planta con el elemento lineal (2) a representar.
- Establecimiento de la altura de vuelo, del recubrimiento, y de la posición aproximada de los fotocentros atendiendo a la escala del proyecto, las características del sensor, y las particularidades el proyecto.- Y desdoblamiento de la línea de vuelo (1) en dos nuevas líneas de vuelo (1') paralelas entre sí y simétricas respecto a la línea original; donde la distancia entre dichas líneas (1') de vuelo será la base aérea de los pares estereoscópicos transversales (5').
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201101096.
Solicitante: INGENIO 3000 SL.
Nacionalidad solicitante: España.
Inventor/es: ALONSO BORRAGAN,IGNACIO JOSE, MARTÍNEZ TORRES,Jorge.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/34 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › Búsqueda de rutas; guiado en ruta.
- G01C23/00 G01C […] › Instrumentos combinados que indican más de un valor de navegación, p. ej. para aeronaves; Dispositivos de medida combinados para la medida de dos o más variables de movimiento, p. ej. distancia, velocidad, aceleración.
Fragmento de la descripción:
MÉTODO PARA LA MODELIZACIÓN DE PARES ESTEREOSCÓPICOS
TRANSVERSALES EN PROCESOS FOTOGRAMÉTRICOS
OBJETO DE LA INVENCIÓN
La invención, tal como expresa el enunciado de la presente memoria descriptiva, se refiere a un método para la modelización de pares estereoscópicos transversales en procesos fotogramétricos, el cual aporta, a la función a que se destina, ventajas y características de novedad que se describirán en detalle más adelante y que suponen una destacable mejora del estado actual de la técnica en su campo de aplicación.
Más en particular, el objeto de la invención se centra en el desarrollo de un método para la modelización de pares estereoscópicos transversales en procesos fotogramétricos, particularmente los aplicados a objetos lineales, empleando dobles pasadas paralelas formando pares estereoscópicos en la dirección perpendicular al avance de la pasada, permitiendo con ello mejorar notablemente las limitaciones que presenta la metodología clásica de configuración de pares estereoscópicos en determinadas circunstancias.
CAMPO DE APLICACIÓN DE LA INVENCIÓN
El campo de aplicación de la presente invención se enmarca dentro del sector técnico de la realización de procesos fotogramétricos aéreos.ANTECEDENTES DE LA INVENCIÓN
Según la Sociedad Internacional de Fotogrametría y Teledetección (ISPRS) , lt;lt;Fotogrametría y Teledetección es el arte, ciencia, y tecnología de obtener información fidedigna a partir de imágenes sin contacto y otros sistemas de sensores de la Tierra y su
entorno, y de otros objetos físicos a través del
registro, medida, análisis y representa ció ngt;gt; (ISPRS,
2000)
Si disponemos de un mínimo de dos imágenes (par) en las que podemos identificar sendas representaciones de un determinado punto del objeto a modelizar, y conocemos todos los parámetros de la orientación espacial de las imágenes, podremos determinar la posición espacial de dicho punto en un determinado sistema de referencia.
La precisión en la determinación de la posición espacial de un punto es función de la distancia lineal que separa dos imágenes que forman un par (Base) en las que el punto a determinar está representado, la distancia focal del sistema óptico, la distancia entre el sensor y el punto a determinar, la resolución de las imágenes, las distorsiones en el sistema óptico del sensor, las características del punto a identificar (como tamaño, forma, orientación,
definición, contraste) , así como los parámetros de
contorno como humedad, temperatura, índice de
refracción, etc.
Las distorsiones en el sistema óptico del sensor se determinan y modelizan mediante un proceso de calibración, y los parámetros de contorno se acotan en un rango en el cual su efecto es inferior a la precisión del sistema o se modelizan. El resto de parámetros se fijan en la configuración del proyecto, que en su mínima expresión se reduce al par estereoscópico.La finalidad en la configuración de un par estereoscópico es permitir la determinación de puntos homólogos de toda la superficie a modelizar, por técnicas manuales o automáticas, que garanticen la unicidad del resultado, con el objetivo de establecer una relación biunívoca entre el modelo representado por el par estereoscópico y la realidad a representar, con precisión suficiente y homogénea.
La metodología clásica de configuración de pares estereoscópicos en procesos fotogramétricos está sometida a limitaciones en determinadas circunstancias, no permitiendo garantizar la unicidad del resultado ni el grado de precisión necesario. Tales circunstancias deben ser analizadas y anticipadas, haciendo que sea deseable el desarrollo de una metodología óptima que elimine o minimice el alcance de tales limitaciones, siendo este el objetivo de la presente invención.
Por otra parte, y como referencia al estado de la técnica, debe señalarse que, por parte del solicitante, se desconoce la existencia de ningún otro método o invención de aplicación similar que presente unas características técnicas, semejantes a las que presenta el que aquí se preconiza, y cuyos detalles caracterizadores se encuentran convenientemente recogidos en las reivindicaciones finales que acompañan a la presente memoria descriptiva del mismo.
EXPLICACIÓN DE LA INVENCIÓNEn la determinación de puntos homólogos de modelos fotogramétricos, ya sea por técnicas manuales o automáticas, se emplea la propiedad de que el homólogo de un punto dado siempre se encuentra en la paralela a la línea epipolar que pasa por dicho punto, característica que permite reducir el área de búsqueda a una línea. La identificación final (posado) se realiza analizando los puntos de esta línea y localizando el mejor candidato.
En determinadas circunstancias puede ocurrir que no exista un único candidato óptimo, con lo que no se podrá garantizar la unicidad de la solución, ni la precisión suficiente. Esta situación se produce cuando se dan conjuntamente dos condicionantes:
Que el elemento a representar es lineal, paralelo o sensiblemente paralelo a la línea epipolar, y la información captada por el sensor del elemento es uniforme o sensiblemente uniforme en un entorno determinado.
Y que el entorno próximo del elemento a representar no permite discriminar entre los posibles candidatos. Esto se produce cuando el entorno próximo es uniforme; cuando no existe correspondencia entre los entornos próximos de los puntos homólogos del elemento; y/o cuando no existe en el entorno próximo ningún elemento característico en dirección distinta a la epipolar.
Como ejemplo de lo anteriormente expuesto, son los siguientes casos:
Aquellos en los que elementos objeto de captura son lineales, paralelos o sensiblemente paralelos a la línea epipolar, y uniformes. Se produce notablemente en líneas blancas de carreteras, catenarias de líneas eléctricas, vías de ferrocarril, en definitiva redes lineales en las que las líneas de vuelo deben seguir forzosamente una dirección paralela al elemento para garantizar el correcto recubrimiento del área de interés del proyecto, y por lo tanto se producirá que las líneas epipolares serán sensiblemente paralelas al elemento a representar.-Aquellos en los que el entorno próximo es uniforme. Se produce muy habitualmente en ferrocarriles cuando el entorno próximo se reduce a la vía y las traviesas, y no existe suficiente definición en el balasto. El detalle se repite cíclicamente en la misma dirección y por lo tanto no se podrá realizar el posado en ausencia de un elemento característico bien contrastado ya sea puntual o lineal.
-Aquellos en los que no hay correspondencia de entornos próximos. Se produce muy habitualmente cuando el elemento a representar se encuentra a distinto nivel que su entorno. Conjuntamente debe ocurrir que el sensor capture la información empleando una proyección no ortogonal, y que la relación entre la altura relativa del elemento con respecto a su entorno próximo y la distancia entre el sensor y el entorno próximo supere un determinado valor. Se produce en catenarias de líneas eléctricas, viaductos, acueductos, en definitiva redes aéreas con una importante altura sobre el terreno.
-Aquellos en los que el entorno próximo es un entorno carente de elementos en dirección distinta a la línea epipolar. Se produce muy habitualmente en carreteras recién asfaltadas, el entorno de la línea blanca es un pavimento homogéneo y uniforme, carente de detalles.Cabe aclarar que el entorno próximo hace referencia al área de estudio en torno al punto de interés, la cual vendrá definida por un tamaño prefijado que se establece atendiendo a los requisitos de precisión posicional requerida y las condiciones particulares de cada proyecto, y que se materializará en una ventana de búsqueda en procesos automáticos, o en un factor de zoom en procesos manuales.
Siguiendo con la explicación del método de la invención, conviene mencionar que la mejor situación posible al realizar una coincidencia entre dos elementos lineales a lo largo de una dirección se produce cuando los elementos siguen una dirección perpendicular al desplazamiento. Por lo tanto la situación ideal frente los casos citados anteriormente, sería que en la identificación final o posado, el elemento lineal a representar siguiese una dirección perpendicular a la línea epipolar. En estas circunstancias la identificación del punto homólogo a lo largo de la línea epipolar se realiza con una precisión muy elevada, garantizando la unicidad, y con independencia de las características del entorno próximo....
Reivindicaciones:
1. MÉTODO PARA LA MODELIZACIÓN DE PARES
ESTEREOSCÓPICOS TRANSVERSALES EN PROCESOS FOTOGRAMÉTRICOS, aplicable a proyectos de fotogrametría en los que la línea de vuelo (1) debe seguir forzosamente una dirección paralela al elemento y en
los que dicho elemento es un elemento con desarrollo
lineal (2) , caracterizado porque comprende los
siguientes pasos:
Diseño de una línea de vuelo (1) fotogramétrico aproximadamente coincidente en planta con el elemento lineal (2) a representar.
-Establecimiento de la altura de vuelo, del recubrimiento, y de la posición aproximada de los fotocentros atendiendo a la escala del proyecto, las características del sensor, y las particularidades el proyecto.
-Desdoblamiento de la línea de vuelo (1) en dos nuevas líneas de vuelo (1' ) paralelas entre sí y simétricas respecto a la línea original; en que los fotocentros de las imágenes tomadas en las dos pasadas correspondientes a la misma zona están situados en la misma perpendicular al elemento lineal (2) , para formar pares estereoscópicos transversales (5') a la línea de vuelo en los que el elemento lineal a representar sigue una dirección perpendicular a la línea epipolar.
2. MÉTODO PARA LA MODELIZACIÓN DE PARES ESTEREOSCÓPICOS TRANSVERSALES EN PROCESOS FOTOGRAMÉTRICOS, según la reivindicación 1, caracterizado porque la distancia entre las nuevas líneas (1') de vuelo paralelas desdobladas será la base aérea de los pares estereoscópicos transversales (5') , y se elige atendiendo a la apreciación altimétrica mínima requerida y al recubrimiento mínimo que garantice la total cobertura del área de proyecto.
Patentes similares o relacionadas:
 Métodos y sistemas de programación de vuelo, del 29 de Julio de 2020, de BAE SYSTEMS PLC: Método, ejecutado por ordenador, de funcionamiento de un sistema electrónico de programación de vuelo para aeronave, en el que el sistema electrónico de programación […]
Métodos y sistemas de programación de vuelo, del 29 de Julio de 2020, de BAE SYSTEMS PLC: Método, ejecutado por ordenador, de funcionamiento de un sistema electrónico de programación de vuelo para aeronave, en el que el sistema electrónico de programación […]
Panel de mandos configurable para cabina de pilotos de aeronave y procedimiento de configuración de tal panel, del 15 de Abril de 2020, de Zodiac Aero Electric: Panel de mandos configurable para cabina de pilotos de aeronave, que incluye un conjunto de módulos de mando genéricos que comprenden cada uno de ellos […]
Un sistema de navegación aérea de operación autónoma, del 25 de Marzo de 2020, de DEUTSCHE TELEKOM AG: Un sistema de navegación aérea de operación autónoma comprendiendo como módulos al menos un servidor de navegación , al menos un agente de navegación […]
Integración de sistemas, del 8 de Enero de 2020, de BAE SYSTEMS PLC: Un método para generar, en una aeronave en vuelo , una visualización indicativa de la factibilidad de que un arma portada en la aeronave acometa con éxito […]
Guía de aproximación de director de vuelo, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un método implementado por ordenador para proporcionar guiado durante una maniobra de aproximación de un avión , comprendiendo el método: determinar una […]
Navegación vehicular basada en datos de calidad de sensor específicos del sitio, del 23 de Octubre de 2019, de DEERE & COMPANY: Un método para determinar la localización de un vehículo, el método que comprende: determinar los datos de localización de recepción dentro de una celda de un área […]
Aparato y método de aterrizaje de una aeronave de palas giratorias, del 10 de Abril de 2019, de BAE SYSTEMS PLC: Un método para ayudar a un piloto al aterrizaje de una aeronave de palas giratorias en condiciones de visibilidad reducida, donde el método […]
Dispositivo para la representación de un terreno sobre un dispositivo de visualización de un cuerpo volador, del 27 de Marzo de 2019, de HENSOLDT Sensors GmbH: Dispositivo para la representación de un terreno sobre un dispositivo de visualización de un avión, conteniendo un sistema sintético de visión con un banco […]