Método para controlar el balancín de sujeción de la carga en una grúa.
Un método para controlar el balanceo y oscilación de un balancín en una grúa y la carga fijada al mismo,
comprendiendo la grúa:
un carrillo (1),
mecanismos elevadores (2) provistos de tambores elevadores (5 3) colocados en el carrillo (1),
cables elevadores (4) dispuestos en los tambores elevadores (3), en los cuales está suspendido el balancín (7)desde el carrillo (1) y que se dirigen de vuelta al carrillo a través de roldanas (8) dispuestas sobre el balancín,controlándose el balanceo y la oscilación por medio de un equipo de control que comprende:
cuatro mecanismos auxiliares (10) provistos de tambores (11) de cable y que incluyen motores y equipos de controlde motores situados en el carrillo (1),
cables auxiliares (12) colocados en los tambores (11) de cable de los mecanismos auxiliares (10),
roldanas (13) para los cables auxiliares colocadas en el balancín (7), a través de cuyas roldanas los cables auxiliares(12) que pasan oblicuamente desde los tambores (11) de cable de los mecanismos auxiliares (10) son dirigidoshacia unos espacios (14) dispuestos en los tambores (2) de cable para los cables auxiliares,
y en cuyo método las fuerzas de los cables auxiliares (12) ejercidas sobre el balancín (7) son controladas por elmovimiento de los cables auxiliares usando los mecanismos auxiliares (10) por medio de instrucciones de par defuerzas (Tcontrol) obtenidas sobre la base de los fuerzas de cable (Fcable) de los cables auxiliares y los datos develocidad de giro (n) de los mecanismos auxiliares usando una lógica de control (C) que permite proporcionar ymantener las fuerzas de cable deseadas, y que controlan la rotación y la resistencia de la oscilación de los motoresde los mecanismos auxiliares.
caracterizado porque se suministra al circuito de la lógica de control (C) una velocidad (ncontrol) en calidad del datode velocidad de giro del mecanismo auxiliar (10) que se forma específicamente para el mecanismo como ladiferencia entre la velocidad de giro medida (nreal) del mecanismo auxiliar y la velocidad de giro calculada (ncalc) delmecanismo auxiliar.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FI2004/000189.
Solicitante: KONECRANES PLC.
Nacionalidad solicitante: Finlandia.
Dirección: KONEENKATU 8 05830 HYVINKÄÄ FINLANDIA.
Inventor/es: SORSA, TIMO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C13/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › para limitar o impedir el balanceo longitudinal o transversal de las cargas.
PDF original: ES-2402152_T3.pdf
Fragmento de la descripción:
Método para controlar el balancín de sujeción de la carga en una grúa.
Antecedentes de la invención La invención se refiere a un método para controlar la balanceo y oscilación de un balancín en una grúa y la carga fijada a la misma, comprendiendo la grúa: un carrillo, mecanismos elevadores provistos de tambores elevadores colocados en el carrillo y cables de elevación dispuestos en los tambores elevadores, en los cuales está suspendido el balancín desde el carrillo y que se dirigen de vuelta al carrillo a través de roldanas dispuestas sobre el balancín, controlándose el balanceo y la oscilación por medio de un equipo de control que comprende: cuatro mecanismos auxiliares provistos de tambores de cable y que incluyen motores y equipos de control de motores situados en el carrillo, cables auxiliares dispuestos en los tambores de cable de los mecanismos auxiliares y roldadas para los cables auxiliares colocadas en el balancín, a través de unas roldanas los cables auxiliares que pasan oblicuamente desde los tambores de cable de los mecanismos auxiliares son dirigidos hacia unos espacios dispuestos en los tambores elevadores para los cables auxiliares, y en cuyo método las fuerzas de los cables auxiliares ejercidas sobre el balancín son controladas moviendo los cables auxiliares usando los mecanismos auxiliares por medio de instrucciones de par de fuerzas obtenidas sobre la base de los fuerzas de los cable auxiliares y los datos de velocidad de giro de los mecanismos auxiliares usando una lógica de control que permite proporcionar y mantener las fuerzas de cable deseadas y que controla la rotación y la resistencia de la oscilación de los motores de los mecanismos auxiliares.
El método de la invención se conoce por el documento WO 97/08094A1, en el que el método se presenta en relación con una grúa que se mueve por medio de neumáticos de caucho y cuyas alturas de elevación y velocidades de elevación son moderadas.
El método según el documento WO 97/08094A1 reduce adecuadamente los movimientos no deseados de la carga en sus aplicaciones originales. Entonces de nuevo, por ejemplo en las grúas de muelle que se mueven sobre carriles presentadas en el documento WO 02/22488A1, cuyas alturas de elevación y velocidades de movimiento son significativamente mayores, la geometría diagonal de los cables auxiliares y las situaciones en las que los cambios de la carrera y el malfuncionamiento asociado con el movimiento de elevación requieren de cambios de velocidad muy rápidos de los mecanismos auxiliares que sean adecuados en todas las situaciones, el método presentando en el documento WO 97/08094A1 proporciona datos de velocidad de giro incorrectos para controlar los mecanismos auxiliares. Asimismo, los documentos WO 02/22488A1 y W0 02/076873A1 representan la técnica anterior en este campo. Especialmente, la disposición según el documento WO 02/22488A1 permite que los ángulos de los cables auxiliares respecto de los tambores elevadores permanezcan sustancialmente iguales con independencia de la altura a la cual esté en cualquier momento dado el miembro de elevación con su carga.
Breve descripción de la invención Es un objeto de la presente invención solucionar el problema antes presentado. Este objeto se logra con el método según la invención, que se caracteriza principalmente porque se suministra un circuito de lógica de control con una instrucción de velocidad en calidad del dato de velocidad de giro del mecanismo auxiliar que se forma específicamente para el mecanismo como la diferencia entre la velocidad de giro medida del mecanismo auxiliar y la velocidad de giro calculada del mecanismo auxiliar.
La velocidad de giro calculada comprende al menos la velocidad de giro calculada del mecanismo auxiliar provocada por la geometría diagonal de los cables auxiliares.
Si los cables auxiliares se enrollan en un tambor elevador en varias capas, entonces la velocidad de giro calculada del mecanismo auxiliar causada por el posible cambio de capa del cable auxiliar que tiene lugar en el tambor elevador se suma a la velocidad de giro calculada.
Preferiblemente, lo que también se suma a la velocidad de giro calculada es la velocidad de giro calculada del mecanismo auxiliar causada por la balanceo del balancín que ocurre alrededor de un eje que es paralelo a los ejes de los tambores elevadores, especialmente cuando tales balanceos se realizan por los movimientos de accionamiento de lo que se conoce como “mecanismos de escora”.
También es apropiado que la velocidad de giro calculada del mecanismo auxiliar que desvía el balancín de la línea horizontal paralela de los tambores elevadores causada por la posible velocidad de elevación variable (especialmente “el accionamiento de compensación” realizado a propósito) de los mecanismos elevadores se suma a la velocidad de giro calculada.
El método según la invención permite eliminar los movimientos correctores bruscos y espasmódicos del balancín y la carga de las grúas construidas para altas velocidades y alturas de elevación, que han hecho imposible como tal el uso del método conocido por la patente FI 101466.
Los detalles de la invención y sus ventajas se describirán en la siguiente descripción detallada de la invención.
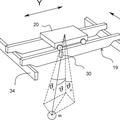
Breve descripción de los dibujos A continuación, el método según la invención se explicará con mayor detalle por medio de una disposición de grúa, en la que el método puede aplicarse exitosamente, con referencia a los dibujos anexos, en los que La figura 1 muestra una vista esquemática simplificada de una disposición de grúa vista desde la dirección de desplazamiento de un carrillo;
La figura 2 es una vista lateral de la disposición mostrada en la figura 1;
La figura 3 es una vista superior de la disposición mostrada en la figura 1;
La figura 4 muestra espacios de cable auxiliar agrandados; y
La figura 5 muestra un diagrama simplificado de un método según la invención.
Descripción detallada de la invención La disposición de grúa mostrada en los dibujos, conocida, por ejemplo, por la patente FI 108788, comprende dos mecanismos elevadores 2 con unos tambores elevadores 3 colocados en un carrillo 1 de grúa. Estos elementos están dispuestos en el carrillo 1 de tal modo que sus ejes longitudinales están en la misma línea A. Dos cables elevadores 4 están dispuestos en paralelo en el tambor elevador 3 de ambos mecanismos elevadores 2 de modo que las acanaladuras 5 y 6 reservadas para los cables en la superficie del tambor elevador 3 estén en direcciones opuestas. Un balancín 7 para sujetar una carga que se ha de izar (no mostrada) está suspendido de los cables elevadores 4. El balancín está provisto de roldanas 8 para los cables elevadores 4. El balancín está provisto de unas roldanas 8 para los cables elevadores 4, mediante las cuales los cables elevadores 4 se dirigen de vuelta al carrillo 1. Las roldanas 8 se colocan en el balancín 7 directa y sustancialmente por debajo de los puntos medios longitudinales de los tambores elevadores 3, con lo que la posición de los cables elevadores permanece sustancialmente simétrica en la dirección vertical a pesar de las diferentes alturas de izado. Los cables elevadores 4 se dirigen hacia el carrillo 1 a través de roldanas adicionales 9 y se aseguran a la grúa mediante protecciones contra posibles sobrecargas (no mostradas) .
En este ejemplo los cables elevadores 4 también se sujetan a sus puntos de sujeción por medio de lo que se conoce como mecanismos 18 de escora, proporcionándose uno de tales mecanismos de escora para dos cables elevadores 4, o sea que, en otras palabras, el número de mecanismos es de dos en esta grúa. Estos mecanismos 18 se usan para escorar el balancín 7 hacia delante o hacia atrás de acuerdo con las flechas L1 y L2 mostradas en la figura 2. Tales mecanismos 18 de escora se conocen como tales y, por tanto, no se explicarán con más detalle en este contexto.
La disposición también comprende cuatro mecanismos auxiliares 10 colocados en el carrillo 1 para controlar el balanceo y la oscilación del balancín 7 y la carga fijado al mismo. Preferiblemente, los mecanismos auxiliares 10 se disponen en un rectángulo (aunque también es posible una disposición asimétrica) de modo que se coloca un mecanismo auxiliar 10 en cada esquina del rectángulo. Un tambor 11 de cable de cada mecanismo auxiliar 10 está provisto de un cable auxiliar 12 que pasa oblicuamente dentro de las roldanas 13 colocadas en el balancín 7 y a través de ellas vuelve hacia los tambores elevadores 3 y dentro de los espacios 14, que están diseñados y reservados preferiblemente para ellos en los tambores elevadores 3. Las roldanas 13 también están preferiblemente... [Seguir leyendo]
Reivindicaciones:
1. Un método para controlar el balanceo y oscilación de un balancín en una grúa y la carga fijada al mismo, comprendiendo la grúa:
un carrillo (1) ,
mecanismos elevadores (2) provistos de tambores elevadores (3) colocados en el carrillo (1) ,
cables elevadores (4) dispuestos en los tambores elevadores (3) , en los cuales está suspendido el balancín (7) desde el carrillo (1) y que se dirigen de vuelta al carrillo a través de roldanas (8) dispuestas sobre el balancín,
controlándose el balanceo y la oscilación por medio de un equipo de control que comprende:
cuatro mecanismos auxiliares (10) provistos de tambores (11) de cable y que incluyen motores y equipos de control de motores situados en el carrillo (1) ,
cables auxiliares (12) colocados en los tambores (11) de cable de los mecanismos auxiliares (10) ,
roldanas (13) para los cables auxiliares colocadas en el balancín (7) , a través de cuyas roldanas los cables auxiliares (12) que pasan oblicuamente desde los tambores (11) de cable de los mecanismos auxiliares (10) son dirigidos hacia unos espacios (14) dispuestos en los tambores (2) de cable para los cables auxiliares,
y en cuyo método las fuerzas de los cables auxiliares (12) ejercidas sobre el balancín (7) son controladas por el movimiento de los cables auxiliares usando los mecanismos auxiliares (10) por medio de instrucciones de par de fuerzas (Tcontrol) obtenidas sobre la base de los fuerzas de cable (Fcable) de los cables auxiliares y los datos de velocidad de giro (n) de los mecanismos auxiliares usando una lógica de control (C) que permite proporcionar y mantener las fuerzas de cable deseadas, y que controlan la rotación y la resistencia de la oscilación de los motores de los mecanismos auxiliares.
caracterizado porque se suministra al circuito de la lógica de control (C) una velocidad (ncontrol) en calidad del dato de velocidad de giro del mecanismo auxiliar (10) que se forma específicamente para el mecanismo como la diferencia entre la velocidad de giro medida (nreal) del mecanismo auxiliar y la velocidad de giro calculada (ncalc) del mecanismo auxiliar.
2. Un método según la reivindicación 1, caracterizado porque la velocidad de giro calculada (ncalc) comprende al menos la velocidad de giro (ng) del mecanismo auxiliar (10) causada por la geometría diagonal de los cables auxiliares, con lo que se presume que los cables elevadores (4) están posicionados verticalmente y que los cables auxiliares (12) están colocados simétricamente,
a1 = un parámetro de geometría vertical del cable auxiliar (12) (a1 – H) es la proyección vertical de la parte diagonal del cable auxiliar (12) ,
a2 = un parámetro de geometría horizontal del cable auxiliar (12) (la proyección horizontal de la parte diagonal del cable auxiliar) ,
a3 = un factor de escala,
H = altura de elevación del balancín (7) , y
dH = velocidad de elevación del balancín (7) .
3. Un método según la reivindicación 2, caracterizado porque la velocidad de giro calculada (ni) del mecanismo auxiliar (10) causada por el cambio de capa del cable auxiliar (12) que tiene lugar en el tambor elevador (2) se suma a la velocidad de giro calculada (ncalc) , por lo que
ni = k x dH, en donde k = un factor de conversión constante, cuyo valor cambia gradualmente en función de la altura de elevación siempre que el cable auxiliar (12) se mueva de una capa a otra del tambor elevador (3) , y
dH = velocidad de elevación del balancín (7) .
4. Un método según la reivindicación 2 o 3, caracterizado porque la velocidad de giro calculada (ns) del mecanismo auxiliar causada por el escorado o balanceo del balancín (7) que tiene lugar alrededor de un eje que es paralelo a los ejes de los tambores elevadores (3) se suma también a la velocidad de giro calculada (ncalc) .
5. Un método según la reivindicación 2, 3 o 4, caracterizado porque la velocidad de giro calculada (nt) del mecanismo auxiliar que se desvía del balancín (7) respecto de la línea horizontal que es paralela a los tambores elevadores (3) causada por la diferente velocidad de elevación de los mecanismos elevadores (2) se suma también a la velocidad de giro calculada (ncalc) .
Patentes similares o relacionadas:
Dispositivo elevador para subir y bajar objetos pesados, del 3 de Junio de 2020, de Mohr Lizenz Verwaltungs GmbH: Dispositivo elevador para subir y bajar objetos, en particular objetos pesados, que comprende dos disposiciones de marco situados […]
Carretillas pórtico para el uso en terminales de contenedores y para otras finalidades de transporte, del 1 de Enero de 2020, de Pfenning Elektroanlagen GmbH: Carretilla pórtico para el uso en terminales de contenedores y para otras finalidades de transporte, con un bastidor , un dispositivo de elevación , que cuelga […]
 Dispositivo y procedimiento para controlar una oscilación de una carga suspendida en un aparato de elevación, del 25 de Septiembre de 2019, de VINATI S.R.L: Un dispositivo para controlar una oscilación de una carga de masa m suspendida desde un elemento motorizado deslizable que puede moverse a lo largo de un eje sustancialmente […]
Dispositivo y procedimiento para controlar una oscilación de una carga suspendida en un aparato de elevación, del 25 de Septiembre de 2019, de VINATI S.R.L: Un dispositivo para controlar una oscilación de una carga de masa m suspendida desde un elemento motorizado deslizable que puede moverse a lo largo de un eje sustancialmente […]
SISTEMAS Y MÉTODOS DE ESTABILIDAD DE CARGA SUSPENDIDA, del 15 de Agosto de 2019, de VITA INCLINATA TECHNOLOGIES, INC: 1. Un aparato de sistema de estabilidad de carga para estabilizar una carga suspendida a través de un cable desde arriba , comprendiendo […]
Unidad de transporte, del 17 de Julio de 2019, de Hans Künz GmbH: Instalación de transporte para el transporte de al menos un contenedor o de otra carga, en la que la instalación de transporte presenta al menos un carro […]
Procedimiento de control de grúa antibalanceo con filtro de tercer orden, del 29 de Mayo de 2019, de MANITOWOC CRANE GROUP FRANCE: Procedimiento de desplazamiento de carga suspendida en un punto de unión de unión (H) de un equipo de elevación , comprendiendo dicho […]
Carretillas pórtico con tambor de cable individual, del 20 de Febrero de 2019, de Pfenning Elektroanlagen GmbH: Carretilla pórtico, con un bastidor , un equipo de manejo de la carga , que cuelga entre el bastidor y que se puede cerrar con una carga, preferentemente […]
Aparato y método para posicionar y orientar una carga, del 30 de Enero de 2019, de FUNDACION TECNALIA RESEARCH & INNOVATION: Un aparato para posicionar y orientar una carga, comprendiendo el aparato: - una estructura de soporte (101a, 101b, 101c) movible en una primera dirección, la estructura […]