Dispositivo de medición y representación de las fuentes de ruido en el interior de un espacio.
Dispositivo de medición y de representación de unas fuentes (19) de ruido en el interior de un espacio (1)delimitado por una superficie (2),
caracterizado porque comprende:
- un conjunto móvil que comprende un sensor dimensional (14) asociado a unos medios de toma de imágenes(12), estando el conjunto móvil diseñado para barrer al menos una parte del espacio (1), de manera que,durante el barrido, el sensor dimensional (14) determine la posición de una pluralidad de puntos (15) de lasuperficie (2), y los medios de toma de imagen (12) registren al menos una imagen de una zona (13) de dichasuperficie (2), estando cada imagen asociada a al menos una coordenada que permite deducir la posición dela imagen con respecto a la superficie (2),
- unos medios (17) diseñados para reconstituir la geometría tridimensional de la superficie (2) que delimita elespacio (1) a partir de las mediciones procedentes del sensor dimensional (14), y para aplicar a dichageometría una textura formada por el ensamblaje de las imágenes, estando cada imagen posicionada endicha geometría en función de las coordenadas asociadas,
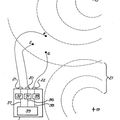
- un sistema de medición acústica o vibratoria (3, 5), destinado a disponerse en el interior del espacio (1), cuyaposición es determinada con respecto al conjunto móvil,
- unos medios de generación de un holograma de las fuentes (19) de ruido, es decir de una distribución de laspresiones, intensidades o aceleraciones acústicas o vibratorias en diferentes puntos de la superficie (2), apartir de las mediciones efectuadas por el sistema de medición acústica o vibratoria (3, 5),
- unos medios diseñados para aplicar el holograma de las fuentes de ruido a la geometría calculada de lasuperficie (2) y a la textura, de manera que se obtenga una representación de las fuentes de ruido en elinterior del espacio (1).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09174748.
Solicitante: MICRODB.
Nacionalidad solicitante: Francia.
Dirección: 7B ALLEE CLAUDE DEBUSSY 69130 ECULLY FRANCIA.
Inventor/es: ROBIN,MAXIME, BEGUET,BERNARD.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01H3/12 FISICA. › G01 METROLOGIA; ENSAYOS. › G01H MEDIDA DE VIBRACIONES MECANICAS O DE ONDAS ULTRASONORAS, SONORAS O INFRASONORAS. › G01H 3/00 Medida de vibraciones utilizando un detector en un fluido (G01H 7/00, G01H 9/00, G01H 11/00 tienen prioridad). › por medios eléctricos (G01H 3/14 tiene prioridad).
- G03H3/00 G […] › G03 FOTOGRAFIA; CINEMATOGRAFIA; TECNICAS ANALOGAS QUE UTILIZAN ONDAS DISTINTAS DE LAS ONDAS OPTICAS; ELECTROGRAFIA; HOLOGRAFIA. › G03H PROCESOS O APARATOS HOLOGRAFICOS (hologramas, p. ej. hologramas de puntos, utilizados como elementos ópticos ordinarios G02B 5/32; computadores analógicos que efectúan operaciones matemáticas con la ayuda de elementos ópticos G06E 3/00; memorias holográficas digitales G11B 7/0065, G11C 13/04). › Procesos o aparatos holográficos que utilizan ondas ultrasonoras, sonoras o infrasonoras para obtener hologramas; Procesos o aparatos para obtener una imagen óptica (G03H 1/22 tiene prioridad).
PDF original: ES-2436660_T3.pdf
Fragmento de la descripción:
Dispositivo de medición y representación de las fuentes de ruido en el interior de un espacio.
La invención se refiere a un dispositivo de medición y de representación de las fuentes de ruido en el interior de un espacio delimitado por una superficie así como a un procedimiento correspondiente.
El confort acústico en el interior de un recinto, y concretamente de un habitáculo de vehículo, tal como un vehículo automóvil o tren, se ha convertido en un reto competitivo. Para optimizarlo, es necesario conocer la importancia de la 10 radiación sonora de los diferentes paneles del habitáculo, tales como cristal o ventanilla, superficie revestida... para realizar tratamientos de aislamiento acústico allí donde sea necesario.
Para ello, conviene disponer de medios que permitan localizar las fuentes de ruido, así como la intensidad sonora de tales fuentes.
Se presenta un dispositivo de medición y de representación de las fuentes de ruido en la zona habitable de un vehículo en el artículo de D. Vaucher de la Croix et al., Holographie acoustique appliquée à des mesures intérieures 3D en habitable, Ingénieurs de l’Automobile, págs. 132-136, 139, nov. dic. de 2000.
Se conoce un dispositivo de medición y de representación de las fuentes de ruido a partir del documento EP 1 557 688.
Este documento describe un dispositivo de medición, destinado a disponerse en un espacio delimitado por una superficie, que comprende una pluralidad de micrófonos dispuestos sobre un soporte esférico y que permite generar 25 un holograma de las fuentes de ruido, es decir una representación de la distribución de las presiones y/o intensidades acústicas.
El holograma permite identificar fácilmente las fuentes de ruido en el interior del espacio.
Con el fin de efectuar la correlación entre las fuentes de ruido visibles en el holograma y las zonas de la superficie que generan este ruido, resulta útil efectuar una representación tridimensional de la superficie del espacio, y aplicar
o superponer a la misma el holograma. Es posible entonces, con la ayuda del holograma, identificar la posición de las fuentes de ruido, y determinar, con la ayuda de la representación de la superficie, el elemento de la superficie que genera este ruido.
Con el fin de que pueda aprovecharse un procedimiento de este tipo de identificación de las fuentes de ruido, es necesario que la representación tridimensional de la superficie sea lo más fiel posible, y que el holograma se posicione correctamente con respecto a la representación tridimensional.
Un primer procedimiento conocido consiste en utilizar representaciones realizadas con la ayuda de geometrías de malla, proporcionadas por los constructores, efectuar la medición acústica, por ejemplo con la ayuda de un dispositivo del tipo del mismo expuesto en el documento EP 1 557 688, obtener un holograma de las fuentes de ruido y aplicar dicho holograma a la geometría.
Este procedimiento plantea los siguientes problemas.
En primer lugar, por motivos de confidencialidad, los constructores son poco proclives a proporcionar los planos y las representaciones de sus vehículos o aparatos. Además, las geometrías proporcionadas utilizan generalmente un mallado fino, difícil de aprovechar como tal por motivos de complejidad de cálculo. Entonces es necesario depurar
los mallados de las geometrías, lo que es largo, fastidioso, y se corre el riesgo de generar geometrías poco fieles a la realidad.
Finalmente, el posicionamiento del dispositivo de medición, y por tanto del holograma, con respecto a la geometría de la superficie, es difícil de determinar con precisión. En efecto, hay que medir los 6 grados de libertad (tres 55 rotaciones y tres traslaciones) del dispositivo de medición.
Un segundo procedimiento consiste en calcular el campo acústico en superficies de cálculo virtuales simplificadas. La geometría real del espacio no se tiene entonces en cuenta y pueden cometerse errores de cálculo. Se aplican tomas de imágenes del espacio a las superficies de cálculo, de manera que se forme una textura.
Se recuerda que una textura es una representación de una superficie, que permite simular el aspecto de la misma cuando se aplica o se “pega” sobre un objeto o una geometría tridimensional.
Aparecen discontinuidades o distorsiones entre las tomas de imágenes y el holograma, lo que perturba la 65 localización y la visualización precisa de las fuentes de ruido.
Un tercer procedimiento consiste en desplazar manualmente una antena acústica que integra un sistema de posicionamiento. La geometría de cálculo generada está constituida por un conjunto de planos del tamaño de la antena, demasiado burdos para efectuar una localización precisa de las fuentes de ruido. Además, no se aplica ninguna textura a la geometría así obtenida, lo que hace difícil la visualización y la localización de las fuentes de ruido. Finalmente, este procedimiento plantea problemas de resincronización de las posiciones de la antena cuando el espacio de medición está en movimiento.
La invención pretende remediar estos inconvenientes proponiendo un dispositivo de medición y de representación de las fuentes de ruido en el interior de un espacio delimitado por una superficie, que permite obtener una visualización precisa de las fuentes de ruido, y de manera sencilla.
Para ello, la invención se refiere a un dispositivo de medición y de representación de las fuentes de ruido en el interior de un espacio delimitado por una superficie, caracterizado porque comprende un conjunto móvil que comprende un sensor dimensional asociado a medios de toma de imágenes, estando el conjunto móvil diseñado para barrer al menos una parte del espacio, de manera que, durante el barrido, el sensor dimensional determina la posición de una pluralidad de puntos de la superficie, y los medios de toma de imagen registran al menos una imagen de una zona de dicha superficie, estando cada imagen asociada a al menos una coordenada que permite deducir la posición de la imagen con respecto a la superficie,
medios diseñados para reconstituir la geometría tridimensional de la superficie que delimita el espacio, a partir de las mediciones procedentes del sensor dimensional, y para aplicar a dicha geometría una textura formada por el ensamblaje de las imágenes, estando cada imagen posicionada en dicha geometría en función de las coordenadas asociadas,
un sistema de medición acústica o vibratoria, cuya posición se determina con respecto al conjunto móvil, medios de generación de un holograma de las fuentes de ruido, es decir de una distribución de las presiones, intensidades o aceleraciones acústicas o vibratorias en diferentes puntos de la superficie, a partir de las mediciones efectuadas por el sistema de medición acústica o vibratoria,
medios diseñados para aplicar el holograma de las fuentes de ruido a la geometría calculada de la superficie y a la textura, de manera que se obtiene una representación de las fuentes de ruido en el interior del espacio.
De esta manera, puede obtenerse una representación realista de la superficie, comprendiendo esta representación las informaciones relativas, por una parte, a la geometría de la superficie y, por otra parte, a la textura de la misma. El número de puntos medidos se determina de manera que sea lo suficientemente importante como para ofrecer una representación fiel de la geometría de la superficie, pero lo suficientemente pequeño como para facilitar el cálculo.
Además, al conocerse la posición del dispositivo de medición enfrentado al sensor dimensional, el holograma generado por el dispositivo de medición puede posicionarse con precisión con la ayuda del sensor dimensional.
Se obtiene entonces finalmente una representación precisa y fiel de las fuentes de ruido y del espacio en el que se efectúa la medición. La localización de las fuentes de ruido se facilita así enormemente.
El conjunto móvil puede ser distinto o no del sistema de medición. En el caso en el que los mismos son distintos entre sí, el conjunto móvil puede retirarse o no del espacio cuando se efectúa la medición con la ayuda del sistema de medición.
Según una característica de la invención, el conjunto móvil comprende una base fija sobre la que se monta un soporte articulado, estando el sensor dimensional y los medios de toma de imágenes montados sobre el soporte articulado.
Ventajosamente, el soporte articulado comprende un primer brazo montado de manera pivotante sobre la base, alrededor del eje longitudinal del primer brazo, y un segundo brazo montado de manera pivotante sobre el primer brazo,... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de medición y de representación de unas fuentes (19) de ruido en el interior de un espacio (1) delimitado por una superficie (2) , caracterizado porque comprende:
- un conjunto móvil que comprende un sensor dimensional (14) asociado a unos medios de toma de imágenes (12) , estando el conjunto móvil diseñado para barrer al menos una parte del espacio (1) , de manera que, durante el barrido, el sensor dimensional (14) determine la posición de una pluralidad de puntos (15) de la superficie (2) , y los medios de toma de imagen (12) registren al menos una imagen de una zona (13) de dicha superficie (2) , estando cada imagen asociada a al menos una coordenada que permite deducir la posición de la imagen con respecto a la superficie (2) ,
- unos medios (17) diseñados para reconstituir la geometría tridimensional de la superficie (2) que delimita el espacio (1) a partir de las mediciones procedentes del sensor dimensional (14) , y para aplicar a dicha geometría una textura formada por el ensamblaje de las imágenes, estando cada imagen posicionada en dicha geometría en función de las coordenadas asociadas,
- un sistema de medición acústica o vibratoria (3, 5) , destinado a disponerse en el interior del espacio (1) , cuya posición es determinada con respecto al conjunto móvil,
- unos medios de generación de un holograma de las fuentes (19) de ruido, es decir de una distribución de las presiones, intensidades o aceleraciones acústicas o vibratorias en diferentes puntos de la superficie (2) , a partir de las mediciones efectuadas por el sistema de medición acústica o vibratoria (3, 5) ,
- unos medios diseñados para aplicar el holograma de las fuentes de ruido a la geometría calculada de la superficie (2) y a la textura, de manera que se obtenga una representación de las fuentes de ruido en el interior del espacio (1) .
2. Dispositivo según la reivindicación 1, caracterizado porque el conjunto móvil comprende una base fija, sobre la cual está montado un soporte articulado (6, 7) , estando el sensor dimensional (14) y los medios de toma de imágenes (12) montados sobre el soporte articulado (6, 7) .
3. Dispositivo según la reivindicación 2, caracterizado porque el soporte articulado comprende un primer brazo (6) montado de manera pivotante sobre la base, alrededor del eje longitudinal (B) del primer brazo (6) , y un segundo brazo (7) montado de manera pivotante sobre el primer brazo (6) , alrededor de un eje perpendicular al eje (B) del primer brazo (6) .
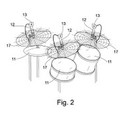
4. Dispositivo según una de las reivindicaciones 1 a 3, caracterizado porque el sistema de medición comprende una pluralidad de sensores de campo vibratorio y/o acústico (5) , orientados según varias direcciones y montados en un soporte esférico (3) .
5. Dispositivo según la reivindicación 4, caracterizado porque los sensores de campo vibratorio y/o acústico son vibrómetros láser y/o micrófonos (5) .
6. Dispositivo según una de las reivindicaciones 4 ó 5, caracterizado porque el soporte esférico (3) está fijado sobre el soporte articulado (6, 7) .
7. Dispositivo según la reivindicación 6, caracterizado porque el sensor dimensional (14) y los medios de toma de imágenes (12) están montados al nivel de la superficie externa (4) del soporte esférico (3) .
8. Dispositivo según una de las reivindicaciones 1 a 7, caracterizado porque el sensor dimensional (14) es un sensor láser, de infrarrojos o de ultrasonidos, que permite determinar la distancia (d) entre el punto (15) correspondiente de la superficie (2) y dicho sensor dimensional (14) .
9. Dispositivo según una de las reivindicaciones 1 a 7, caracterizado porque el sensor dimensional (14) comprende al menos dos cámaras y unos medios de tratamiento de los datos aptos para recoger los datos procedentes de las cámaras y calcular, mediante estereoscopía, la posición de cada punto barrido.
10. Dispositivo según una de las reivindicaciones 1 a 9, caracterizado porque los medios de toma de imagen comprenden una cámara (12) digital.
11. Procedimiento de medición y de representación de las fuentes (19) de ruido en el interior de un espacio (1) delimitado por una superficie (2) , caracterizado porque comprende las etapas siguientes:
- posicionar, en el interior del espacio (1) , un conjunto móvil que comprende un sensor dimensional (14) asociado a unos medios de toma de imágenes (12) ,
- barrer al menos una parte del espacio (1) con la ayuda del conjunto móvil, de manera que, durante el barrido, el sensor dimensional (14) determine la posición de una pluralidad de puntos (15) de la superficie (2) , y los medios de toma de imagen (12) registren al menos una imagen de una zona (13) de dicha superficie (2) ,
estando cada imagen asociada a al menos una coordenada que permite deducir la posición de la imagen con respecto a la superficie (2) ,
- reconstituir la geometría tridimensional de la superficie (2) y aplicar a dicha geometría una textura formada
por el ensamblaje de las imágenes, estando cada imagen posicionada en dicha geometría en función de las 10 coordenadas asociadas,
- efectuar una medición acústica o vibratoria con la ayuda de un sistema de medición (3, 5) dispuesto en el interior del espacio (1) y cuya posición es determinada con respecto al conjunto móvil,
- generar un holograma de las fuentes (19) de ruido, es decir una distribución de las presiones, intensidades o aceleraciones acústicas o vibratorias en diferentes puntos de la superficie (2) , a partir de las mediciones efectuadas por el sistema de medición (3, 5) ,
-aplicar el holograma de las fuentes de ruido a la geometría calculada de la superficie (2) y a la textura, de 20 manera que se obtenga una representación de las fuentes de ruido en el interior del espacio (1) .
Patentes similares o relacionadas:
 Una cámara acústica y un método para revelar emisiones acústicas de varios lugares y dispositivos, del 24 de Junio de 2020, de Noiseless Acoustics Oy: Una cámara acústica, que comprende:
- una carcasa ;
- un conjunto de micrófonos configurados para recopilar información de sonido acústico y para […]
Una cámara acústica y un método para revelar emisiones acústicas de varios lugares y dispositivos, del 24 de Junio de 2020, de Noiseless Acoustics Oy: Una cámara acústica, que comprende:
- una carcasa ;
- un conjunto de micrófonos configurados para recopilar información de sonido acústico y para […]
Procedimiento para la obtención de un indicador de ruido acústico, del 11 de Enero de 2019, de UNIVERSIDAD DE JAEN: Procedimiento para la obtención de un indicador de ruido acústico ejecutado en un nodo sensor que comprende de una captación de muestras de ruido por […]
 Procedimiento de medida del ruido de un secador de pelo, del 13 de Enero de 2016, de SEB S.A.: Procedimiento de evaluación del ruido que emite un secador de pelo con eje longitudinal Δ con una salida hacia la parte delantera, procedimiento que comprende las siguientes […]
Procedimiento de medida del ruido de un secador de pelo, del 13 de Enero de 2016, de SEB S.A.: Procedimiento de evaluación del ruido que emite un secador de pelo con eje longitudinal Δ con una salida hacia la parte delantera, procedimiento que comprende las siguientes […]
 PROCEDIMIENTO DE MONITORIZACIÓN MEDIANTE REALIDAD AUMENTADA DE FENÓMENOS ACÚSTICOS EN MICROFONÍA Y/O EN FUENTES DE SONIDO Y SISTEMA DE ELEMENTOS QUE LO DESARROLLAN, del 11 de Diciembre de 2014, de ARATECHLABS, S.L: La presente solicitud de Patente de Invención consiste en un procedimiento y sistema de identificación, cálculo y visualización de fenómenos acústicos entre uno o varios […]
PROCEDIMIENTO DE MONITORIZACIÓN MEDIANTE REALIDAD AUMENTADA DE FENÓMENOS ACÚSTICOS EN MICROFONÍA Y/O EN FUENTES DE SONIDO Y SISTEMA DE ELEMENTOS QUE LO DESARROLLAN, del 11 de Diciembre de 2014, de ARATECHLABS, S.L: La presente solicitud de Patente de Invención consiste en un procedimiento y sistema de identificación, cálculo y visualización de fenómenos acústicos entre uno o varios […]
PROCEDIMIENTO Y DISPOSITIVO PARA EL REGISTRO DE UNA IMAGEN DE LA SUPERFICIE DE UN OBJETO POR MEDIO DE UNA RADIACION QUE SE PUEDE ENFOCAR., del 16 de Junio de 2004, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para el registro de una imagen de la superficie de un objeto por medio de una radiación que se puede enfocar, que comprende las etapas […]
CAPTADOR DE GRADIENTE DE PRESION ACUSTICA., del 16 de Agosto de 2001, de GIAT INDUSTRIES: DETECTOR DE GRADIENTE DE PRESION ACUSTICA APTO PARA DETECTAR UNA SEÑAL SONORA, CARACTERIZADO PORQUE LLEVA: UN MEDIO MECANOACUSTICO CONSTITUIDO […]
DISPOSITIVO SONORO DE CARTOGRAFIA., del 1 de Marzo de 1990, de ELECTRICITE DE FRANCE SERVICE NATIONAL: COMPRENDE DOS MEDIOS DE DETECCION DE NIVELES SONOROS DE FORMA NUMERICA; MEDIOS DE EXHIBICION POR OPERADOR; COORDENADAS REPRESENTATIVAS DE CADA […]
 SUPERVISION DEL RUIDO AMBIENTAL, del 1 de Julio de 2008, de SOUNDSCIENCE WM PTY LTD.: Un método de supervisión de ruido ambiental; método que consta de las etapas siguientes: * Utiliza cada uno de los tres o mas transductores sonoros separados […]
SUPERVISION DEL RUIDO AMBIENTAL, del 1 de Julio de 2008, de SOUNDSCIENCE WM PTY LTD.: Un método de supervisión de ruido ambiental; método que consta de las etapas siguientes: * Utiliza cada uno de los tres o mas transductores sonoros separados […]