Máquina-herramienta de mano.
Máquina-herramienta de mano, particularmente un martillo perforador y/o un martillo cincelador,
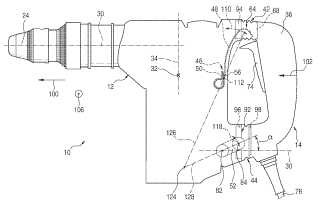
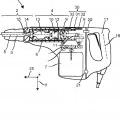
con un elementoprincipal (12) que comprende un eje de la herramienta (30), un centro de gravedad (32) y un eje normal (34) que seextiende perpendicular al eje de la herramienta (30) y que se extiende a lo largo del centro de gravedad (32), endonde el eje de la herramienta (30) y el eje normal (34), definen un plano de movimiento con una empuñadura (14),que se encuentra alojada de manera móvil en el plano de movimiento en relación con el elemento principal (12), ycon una unidad tensora (46) que une la empuñadura (14) con el elemento principal (12), que presenta, al menos, unelemento tensor (48), en donde la unidad tensora (46) se proporciona para predeterminar, al menos, esencialmenteuna trayectoria del movimiento (110) de, al menos, una fracción de la empuñadura (14) en el plano de movimiento,ante una fuerza de carga (102) que inicia una aproximación de la empuñadura (14) desde una posición de reposo, alelemento principal (12) en reposo, en donde la empuñadura (14) presenta un cuerpo base de la empuñadura (36), yse proporciona un elemento giratorio (52) que une el cuerpo base de la empuñadura (36) y el elemento principal(12), que en una acción conjunta con la unidad tensora (46), establece un centro instantáneo de la empuñadura (14),alrededor del cual la empuñadura (14) realiza una rotación en el plano de movimiento, ante un desplazamiento enrelación con el elemento principal (12), en donde el centro instantáneo de la empuñadura (14) se puede desplazarincluso en el espacio, durante un desplazamiento de la empuñadura (14) en relación con el elemento principal (12),caracterizada porque el elemento giratorio (52) se encuentra alojado de manera que pueda rotar en relación con elelemento principal (12) y con el cuerpo base de la empuñadura (26), en donde el elemento giratorio (52) seencuentra alojado de manera articulada alrededor de un punto de rotación (82) fijo con el elemento principal (12), endonde el elemento giratorio (52) se encuentra alojado de manera articulada alrededor de un punto de rotación (84)fijo con el cuerpo base de la empuñadura (36), en donde el elemento giratorio (52) se conforma como un elementode palanca, que presenta dos brazos de palanca (86, 88), en donde el elemento tensor (48) se conforma como unresorte de láminas, en donde la unidad tensora (46) presenta un medio de soporte (50) para el soporte del elementotensor (48), y ante un movimiento de la empuñadura (14) en relación con el elemento principal (12), el elementotensor (48) realiza un movimiento de rodadura sobre el medio de soporte (50).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/054362.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20 70442 STUTTGART ALEMANIA.
Inventor/es: BRAUN, WILLY, KUHNLE,Axel, FRAUHAMMER,Karl.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25D17/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25D HERRAMIENTAS DE PERCUSION. › B25D 17/00 Partes constitutivas, o accesorios, de herramientas portátiles de percusión accionadas mecánicamente. › Mangos; Montaje de estos mangos.
PDF original: ES-2403643_T3.pdf
Fragmento de la descripción:
Máquina-herramienta de mano Estado del arte La presente invención hace referencia a una máquina-herramienta de mano, particularmente un martillo perforador y/o un martillo cincelador, con un elemento principal y una empuñadura, de acuerdo con el concepto general de la reivindicación 1.
Por ejemplo, de la patente DE 41 24 574 A1 se conoce una máquina-herramienta de mano de esta clase, con un elemento principal y una empuñadura. Para la amortiguación de una transmisión de vibraciones desde el elemento principal a la empuñadura, la empuñadura se encuentra alojada de manera móvil en relación con el elemento principal, y se conecta con el elemento principal a través de un elemento tensor.
Ventajas de la presente invención La presente invención hace referencia a una máquina-herramienta de mano de acuerdo con la reivindicación 1, particularmente un martillo perforador y/o un martillo cincelador, con un elemento principal que comprende un eje de la herramienta, un centro de gravedad y un eje normal que se extiende perpendicular al eje de la herramienta y a lo largo del centro de gravedad, en donde el eje de la herramienta y el eje normal definen un plano de movimiento, con una empuñadura que se encuentra alojada de manera móvil en el plano de movimiento en relación con el elemento principal, y con una unidad tensora que une la empuñadura con el elemento principal, y dicha unidad presenta, al menos, un elemento tensor. Las ejecuciones ventajosas se describen en las reivindicaciones relacionadas.
La unidad tensora se proporciona para predeterminar, al menos, esencialmente una trayectoria del movimiento, al menos, de una fracción de la empuñadura en el plano de movimiento, ante una fuerza de carga que inicia una aproximación de la empuñadura desde una posición de reposo, al elemento principal en reposo. De esta manera, se puede lograr una estabilidad de la empuñadura particularmente elevada, así como una sensación de seguridad háptica ventajosa en la manipulación de la máquina-herramienta, sin que se perjudique la movilidad de la empuñadura en el plano de movimiento.
La máquina-herramienta de mano está provista preferentemente de un medio de guía que se proporciona para evitar un desplazamiento de la empuñadura, perpendicular al plano de movimiento. Mediante dicho medio de guía, la empuñadura se puede conducir mediante un movimiento en el plano de movimiento. Por un movimiento de un cuerpo rígido “en” el plano de movimiento, en dicho contexto se entiende particularmente como un movimiento plano de dicho cuerpo rígido, al menos, esencialmente paralelo al plano de movimiento. Por un movimiento del cuerpo rígido “al menos esencialmente paralelo” al plano de movimiento, en dicho contexto se entiende particularmente un movimiento en el cual un componente de movimiento perpendicular al plano de movimiento, asciende, al menos, al 15%, preferentemente, al menos, al 10%, de manera particularmente ventajosa, al menos, al 5% del movimiento completo del cuerpo rígido. La trayectoria del movimiento es preferentemente una trayectoria curvada que presenta un componente axial a lo largo del eje de la herramienta, y un componente normal a lo largo del eje normal. La trayectoria del movimiento de la fracción de la empuñadura, se predetermina particularmente “mediante la unidad tensora”, cuando la fracción de la empuñadura se conduce en dicha trayectoria del movimiento, ante el movimiento de aproximación de la empuñadura, mediante la acción exclusiva de la unidad tensora. Durante el movimiento de aproximación de la empuñadura, la fracción de la empuñadura se conduce a lo largo de un recorrido del movimiento que posiblemente difiere de la trayectoria del movimiento, debido a la acción de otras partes diferentes a la unidad tensora. La unidad tensora preestablece la trayectoria del movimiento “al menos esencialmente”, particularmente cuando el recorrido del movimiento difiere con un valor de divergencia reducido del 15% como máximo, de manera ventajosa del 10% como máximo, y de manera particularmente preferente del 5% como máximo de la longitud completa de la trayectoria del movimiento. Expresado de otra manera: el recorrido del movimiento se encuentra dentro de un rango de tolerancia alrededor de la trayectoria del movimiento, que se extiende coaxialmente en relación con la trayectoria del movimiento, y que se extiende transversalmente en relación con el sentido de extensión, mediante el valor de divergencia reducido. Por una “fuerza de carga” se puede entender particularmente una fuerza exterior ejercida sobre la máquina-herramienta de mano. La fuerza de carga puede ser ejercida por el usuario sobre la empuñadura, mediante su accionamiento en el sentido de trabajo. Por un “sentido de trabajo”, en dicho contexto se puede entender particularmente un sentido preferido, en el cual la máquina-herramienta de mano se presiona sobre una herramienta o sobre una pieza de trabajo. El sentido de trabajo corresponde preferentemente, al menos, esencialmente al eje de la herramienta del elemento principal. Por ejemplo, el sentido de trabajo junto con el eje de la herramienta, conforma un ángulo menor a 15°, particularmente menor a 10°. La fuerza de carga también puede ser una fuerza ejercida por una pieza de trabajo a mecanizar, que actúa sobre el elemento principal. Con el término “elemento principal en reposo”, se aclara que el elemento principal se selecciona como un sistema de referencia en reposo para la descripción de movimientos relativos de la empuñadura y del elemento principal. Por el término “posición de reposo” de la empuñadura o del elemento principal, se puede entender una posición de esta clase de la empuñadura o bien, del elemento principal en relación con el elemento principal o bien, la empuñadura, en la que no se ejercen fuerzas exteriores sobre la empuñadura o bien, sobre el elemento principal. Por el “eje de la herramienta“ se entiende particularmente un eje definido mediante un alojamiento de herramienta de la máquinaherramienta de mano, a lo largo del cual se puede introducir una herramienta en el alojamiento para la herramienta. El “elemento principal” puede comprender todo lo que se fija en la máquina-herramienta de mano, excepto la empuñadura. La empuñadura se conforma preferentemente como una empuñadura principal de la máquinaherramienta de mano. Además de la empuñadura principal, la máquina-herramienta de mano puede presentar también una empuñadura adicional. Por una “fracción” de la empuñadura, se entiende particularmente una zona parcial continua de la empuñadura, que representa preferentemente, al menos, el 10% del volumen completo de la empuñadura.
En el caso que la empuñadura se considere un sistema de referencia de reposo, se puede lograr una acción amortiguadora elevada, cuando ante una aproximación del elemento principal desde una posición de reposo a la empuñadura en reposo, que se inicia mediante la fuerza de carga, una fracción significativa del elemento principal se conduce en una trayectoria de movimiento con un componente de movimiento a lo largo del eje normal. Una fracción de esta clase comprende preferentemente, al menos, 10 % en peso, particularmente, al menos, 35 % en peso del elemento principal, en donde una fracción superior al 50 % en peso del elemento principal puede conducir a una amortiguación particularmente óptima de las vibraciones de la empuñadura.
Además, la unidad tensora presenta un medio de soporte para el soporte del elemento tensor, que en una acción conjunta con el elemento tensor, establece la trayectoria del movimiento. De esta manera, se puede preestablecer la trayectoria del movimiento de una manera constructiva simple, mediante la selección de los parámetros constructivos de la máquina-herramienta de mano, particularmente mediante la conformación del medio de soporte, su posición, etc.
Se puede lograr un efecto amortiguador elevado, dado que la empuñadura presenta un cuerpo base de la empuñadura, y la máquina-herramienta de mano presenta un elemento giratorio que une el cuerpo base de la empuñadura y el elemento principal, que en una acción conjunta con la unidad tensora establece un eje de rotación sin articulación, alrededor del cual la empuñadura realiza una rotación en el plano de movimiento, ante un desplazamiento en relación con el elemento principal. El eje de rotación está conformado por el centro instantáneo de la empuñadura. El centro instantáneo se conoce a partir de la teoría del cuerpo rígido. Se trata de un punto, alrededor del cual un movimiento plano del cuerpo rígido se puede considerar momentáneamente como una rotación pura, es decir, un punto que se encuentra... [Seguir leyendo]
Reivindicaciones:
1. Máquina-herramienta de mano, particularmente un martillo perforador y/o un martillo cincelador, con un elemento principal (12) que comprende un eje de la herramienta (30) , un centro de gravedad (32) y un eje normal (34) que se extiende perpendicular al eje de la herramienta (30) y que se extiende a lo largo del centro de gravedad (32) , en donde el eje de la herramienta (30) y el eje normal (34) , definen un plano de movimiento con una empuñadura (14) , que se encuentra alojada de manera móvil en el plano de movimiento en relación con el elemento principal (12) , y con una unidad tensora (46) que une la empuñadura (14) con el elemento principal (12) , que presenta, al menos, un elemento tensor (48) , en donde la unidad tensora (46) se proporciona para predeterminar, al menos, esencialmente una trayectoria del movimiento (110) de, al menos, una fracción de la empuñadura (14) en el plano de movimiento, ante una fuerza de carga (102) que inicia una aproximación de la empuñadura (14) desde una posición de reposo, al elemento principal (12) en reposo, en donde la empuñadura (14) presenta un cuerpo base de la empuñadura (36) , y se proporciona un elemento giratorio (52) que une el cuerpo base de la empuñadura (36) y el elemento principal (12) , que en una acción conjunta con la unidad tensora (46) , establece un centro instantáneo de la empuñadura (14) , alrededor del cual la empuñadura (14) realiza una rotación en el plano de movimiento, ante un desplazamiento en relación con el elemento principal (12) , en donde el centro instantáneo de la empuñadura (14) se puede desplazar incluso en el espacio, durante un desplazamiento de la empuñadura (14) en relación con el elemento principal (12) , caracterizada porque el elemento giratorio (52) se encuentra alojado de manera que pueda rotar en relación con el elemento principal (12) y con el cuerpo base de la empuñadura (26) , en donde el elemento giratorio (52) se encuentra alojado de manera articulada alrededor de un punto de rotación (82) fijo con el elemento principal (12) , en donde el elemento giratorio (52) se encuentra alojado de manera articulada alrededor de un punto de rotación (84) fijo con el cuerpo base de la empuñadura (36) , en donde el elemento giratorio (52) se conforma como un elemento de palanca, que presenta dos brazos de palanca (86, 88) , en donde el elemento tensor (48) se conforma como un resorte de láminas, en donde la unidad tensora (46) presenta un medio de soporte (50) para el soporte del elemento tensor (48) , y ante un movimiento de la empuñadura (14) en relación con el elemento principal (12) , el elemento tensor (48) realiza un movimiento de rodadura sobre el medio de soporte (50) .
2. Máquina-herramienta de mano de acuerdo con la reivindicación 1, caracterizada porque la unidad tensora (46) presenta el medio de soporte (50) para el soporte del elemento tensor (48) , que establece la trayectoria del movimiento (110) en una acción conjunta con el elemento tensor (48) .
3. Máquina-herramienta de mano de acuerdo con una de las reivindicaciones precedentes, caracterizada porque la empuñadura (14) se mantiene en la posición de reposo mediante el elemento tensor (48) .
4. Máquina-herramienta de mano de acuerdo con una de las reivindicaciones precedentes, caracterizada por un primer y un segundo elemento de carcasa (16, 18) , un elemento de fijación (20) para la fijación del primer elemento de carcasa (16) en el segundo elemento de carcasa (18) , y un medio de soporte (50) para el soporte del elemento tensor (48) , que se encuentra fijado en el elemento de fijación (20) .
5. Máquina-herramienta de mano de acuerdo con la reivindicación 4, caracterizada porque el elemento tensor (48) presenta una zona parcial (58) que rodea, al menos, esencialmente el elemento de fijación (20) .
6. Máquina-herramienta de mano de acuerdo con una de las reivindicaciones precedentes, caracterizada por un medio de apriete (70) para la sujeción del elemento tensor (48) .
7. Máquina-herramienta de mano de acuerdo con una de las reivindicaciones precedentes, caracterizada por un cuerpo base de empuñadura (36) de la empuñadura (14) , un elemento de carcasa (38) , una unidad de fuelle (42) que une el elemento principal (12) con el cuerpo base de la empuñadura (36) , y un elemento de fijación (68) que se proporciona para la fijación de, al menos, la unidad de fuelle (42) y del elemento tensor (48) en el elemento de carcasa (38) .
8. Máquina-herramienta de mano de acuerdo con una de las reivindicaciones precedentes, caracterizada porque el elemento principal (12, 164) comprende un elemento de carcasa (16, 166) , en donde la empuñadura (14, 170) comprende un módulo de fijación (159, 161, 172, 174) que se puede desmontar del cuerpo base de la empuñadura (36) , y que se encuentra incorporado en el elemento de carcasa (16, 166) , que conforma una interfaz para la fijación del cuerpo base de la empuñadura (36) en el elemento principal (12, 164) .
9. Máquina-herramienta de mano de acuerdo con la reivindicación 8, caracterizada porque el cuerpo base de la empuñadura (36) se encuentra conectado con el elemento principal (12) mediante una unidad de aislamiento de la vibración (45) , en donde la unidad de aislamiento de la vibración (45) es encuentra fijada en el módulo de fijación (159, 161) .
10. Máquina-herramienta de mano de acuerdo con la reivindicación 8 ó 9, caracterizada porque el módulo de fijación (159, 161) presenta una unidad de fuelle (42, 44) que conecta el cuerpo base de la empuñadura (36) y el elemento principal (12) .
Patentes similares o relacionadas:
Herramienta manual accionada con motor, del 16 de Noviembre de 2016, de ILLINOIS TOOL WORKS INC.: Una herramienta manual accionada con motor que tiene un cuerpo de máquina y que tiene una disposición de mango , en la que la disposición de mango […]
Máquina herramienta manual, del 20 de Julio de 2016, de HILTI AKTIENGESELLSCHAFT: Máquina herramienta manual con un portaherramientas para alojar una herramienta sobre un eje de trabajo , un mecanismo de percusión […]
Martillo neumático guiado manualmente con amortiguación de vibraciones, del 4 de Mayo de 2016, de BBG BAUGERATE GMBH: Martillo neumático (D) guiado manualmente con amortiguación de vibraciones con un cuerpo de asido (G) y un cilindro de trabajo que penetra en este […]
 Máquina herramienta manual, del 25 de Febrero de 2015, de HILTI AKTIENGESELLSCHAFT: Máquina herramienta manual con un accionamiento oscilante a lo largo de un eje de trabajo y con un amortiguador de vibraciones , que presenta un cuerpo […]
Máquina herramienta manual, del 25 de Febrero de 2015, de HILTI AKTIENGESELLSCHAFT: Máquina herramienta manual con un accionamiento oscilante a lo largo de un eje de trabajo y con un amortiguador de vibraciones , que presenta un cuerpo […]
Herramienta eléctrica, del 30 de Octubre de 2013, de Keyang Electric Machinery Co., Ltd: Una herramienta eléctrica que comprende: un primer medio de reducción de la vibración dispuesto dentro de un cuerpo de la herramienta y una pieza […]
MARTILLO DE PERFORACION Y/O DE PERCUSION CON CONTROL DE MARCHA EN VACIA DEPENDIENTE DE LA PRESION DE APRIETE., del 1 de Diciembre de 2005, de WACKER CONSTRUCTION EQUIPMENT AG: Martillo de perforación y/o de percusión que comprende - al menos una empuñadura con un sitio de agarre (2b) para sujetar y presionar el martillo de perforación y/o […]
EMPEÑADURAS INTERCAMBIABLES PARA HERRAMIENTAS MECANICAS MANUALES., del 16 de Noviembre de 2004, de SNAP-ON TOOLS COMPANY: Una empuñadura recambiable para una parte de mango generalmente cilíndrica de un alojamiento de herramienta mecánica manual con […]
 EQUIPO DE TRABAJO GUIADO MANUALMENTE, del 29 de Abril de 2011, de ANDREAS STIHL AG & CO. KG: Equipo de trabajo guiado manualmente con una carcasa , con un motor de accionamiento que acciona un elemento de accionamiento con un movimiento […]
EQUIPO DE TRABAJO GUIADO MANUALMENTE, del 29 de Abril de 2011, de ANDREAS STIHL AG & CO. KG: Equipo de trabajo guiado manualmente con una carcasa , con un motor de accionamiento que acciona un elemento de accionamiento con un movimiento […]