Generación automática de orificios.
Un procedimiento para realizar operaciones sobre una estructura (306;
404; 630; 738), comprendiendo elprocedimiento:
posicionar una plataforma movible (308; 502; 702) en un área con relación a la estructura para definir un área detrabajo (318; 628; 732), en la que la plataforma movible está conectada a una herramienta (310; 518; 618; 726) quese desplaza alrededor de una pluralidad de ejes (311) dentro del área de trabajo usando la plataforma movible;desplazar la herramienta a una pluralidad de ubicaciones dentro del área de trabajo que usa la plataforma movible; yrealizar una operación con la herramienta a través del área de trabajo en cada una de la pluralidad de lasubicaciones que usan la plataforma movible.
en el que la pluralidad de ejes proporcionan seis grados de libertad, y en el que la plataforma movible y laherramienta son parte de una máquina cinemática paralela (348).y posicionar la herramienta y realizar la operación con la plataforma movible,
caracterizado porque la plataforma movible está asociada con una plataforma fija (313; 506; 604; 704) y la etapa deposicionar la plataforma movible en el área con relación a la estructura para definir el área de trabajo comprendecolocar la plataforma fija en el área con relación a la estructura para definir el área de trabajo, y el área de trabajoestá definida por una abertura en la plataforma fija asociada con la plataforma movible, en la que la aberturaexpones una superficie de la estructura a la herramienta.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10157743.
Solicitante: THE BOEING COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 100 NORTH RIVERSIDE PLAZA CHICAGO, IL 60606-1596 ESTADOS UNIDOS DE AMERICA.
Inventor/es: Whinnem,Eric, LIPCZYNSKI,GARY A, BAUMANN,JOHN A.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q1/54 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 1/00 Elementos componentes de la estructura general de un tipo de máquina, y más especialmente los elementos fijos más grandes (B23Q 37/00 tiene prioridad). › con sólo dos pares de rotación.
- B23Q9/00 B23Q […] › Dispositivos para el soporte o el guiado de aparatos o máquinas portátiles para el trabajo del metal (para el aterrajado de tubos B23B 41/08; especialmente concebidos para la perforación B23B 45/14).
PDF original: ES-2394612_T3.pdf
Fragmento de la descripción:
Generación automática de orificios.
Información de antecedentes
Campo La presente invención se refiere en general a la fabricación y, en particular, a un procedimiento para formar orificios. Aún de forma más particular, la presente invención se refiere a un procedimiento para generar automáticamente orificios en una estructura.
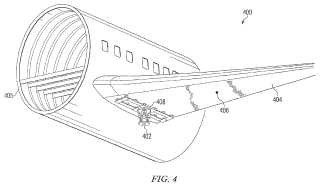
Antecedentes En la fabricación de aviones, se pueden fabricar y ensamblar varias partes para formar diferentes estructuras para un avión. Por ejemplo, sin limitación, tirantes de refuerzo, montantes, y largueros pueden estar dispuestos en una estructura de ala para un ala. Los paneles de revestimiento se pueden colocar posteriormente sobre la estructura para el ala y asegurarse a la estructura para formar el ala. El documento DE-102005040795 divulga un procedimiento de acuerdo con el preámbulo de la reivindicación 1.
Al ensamblar los largueros, montantes y los tirantes de refuerzo para formar la estructura del ala, los orificios se pueden perforar a través de las diferentes partes, y los sujetadores se pueden asegurar en los orificios para conectar y/o unir las partes entre sí. Cuando los paneles de revestimiento se unen a la estructura del ala, miles de orificios se pueden perforar en los paneles de revestimiento y/o las porciones de la estructura del ala. Los sujetadores se pueden instalar posteriormente para unir los paneles de revestimiento a la estructura del ala.
La perforación de orificios en la estructura de un avión en el ensamblaje final se puede considerar un procedimiento de trayectoria crítica. Por ejemplo, sin limitación, la colocación, el tamaño, la orientación, y otros factores para estos orificios pueden ser importantes para garantizar que las diferentes partes se puedan asegurar dentro de las tolerancias deseadas.
Los procedimientos actualmente disponibles para la perforación de orificios en el ensamblaje final de la estructura de un avión pueden involucrar múltiples mecánicos de la aeronave. Los mecánicos de la aeronave pueden estar en posiciones difíciles para acceder a las áreas circundantes y/o en la estructura para perforar los orificios usando las herramientas con motor manuales. Este tipo de procedimiento puede ser tedioso, exigente, y/o que requiera mucho tiempo.
Además, los procedimientos actuales también pueden emplear sistemas de perforación automáticos. Estos sistemas de perforación pueden estar diseñados con bases voluminosas y/o rígidas para reaccionar a las fuerzas creadas por el procedimiento de perforación y pueden ser difíciles de posicionar. En otras palabras, el posicionamiento de un eje en un sistema de perforación automático en las orientaciones del vector X, Y, y Z para perforación puede ser difícil para realizar el ensamblaje del avión.
Además, el gran tamaño de las máquinas perforadoras automáticas y sus movimientos puede evitar que los mecánicos del avión ingresen al área y/o a los alrededores de donde se localizan estas máquinas para realizar otras tareas, mientras la máquina perforadora automática está en uso. Como resultado de ello, se pueden retardar otras tareas hasta que las operaciones de perforación se hayan completado para un área particular.
Además, la mayoría de los orificios perforados en la estructura pueden ser perforados en tiras de varias filas o patrones que no son amplios, sino muy largos en longitud. Estos orificios se pueden usar para instalar de forma conjunta sujetadores y piezas de empalme del avión. Toda automatización debe poder, como mínimo, atravesar el ancho y la longitud de un empalme.
Por lo tanto, sería ventajoso tener un procedimiento que tenga en cuenta una o más de las cuestiones mencionadas anteriormente, como también posiblemente otras cuestiones.
Resumen En una realización ventajosa, puede estar presente un procedimiento para realizar operaciones sobre una estructura, de acuerdo con la realización 1.
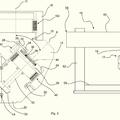
En otra realización ventajosa, puede estar presente un procedimiento para perforar orificios en una estructura de avión. Una plataforma fija asociada con una plataforma movible puede estar colocada en la forma de un hexápodo en un área con relación a la estructura del avión para definir un área de trabajo. La plataforma movible puede estar conectada a una herramienta de corte que puede ser movible alrededor de una pluralidad de ejes que usan la plataforma movible. El área de trabajo puede estar definida por una abertura en la plataforma fija en la cual la abertura puede exponer una superficie de la estructura del avión a la herramienta de corte. La herramienta de corte puede ser desplazada a una pluralidad de ubicaciones dentro del área de trabajo que usa la plataforma movible. La herramienta de corte puede ser normalizada con relación a la estructura del avión antes de realizar una operación en cada una de la pluralidad de las ubicaciones. Se puede realizar una operación de perforación a través del área de trabajo en cada una de la pluralidad de las ubicaciones que usan la plataforma movible para formar una pluralidad de orificios en la estructura del avión en el área. Esta operación de perforación se puede realizar posicionando una herramienta de corte sobre la superficie de la estructura del avión en una posición seleccionada que puede ser compensada desde una línea central para un orificio que usa la plataforma movible en cada una de la pluralidad de ubicaciones, girando la herramienta de corte en respuesta al posicionamiento de la herramienta de corte, moviendo la herramienta de corte dentro de la estructura del avión usando la plataforma movible en respuesta a la rotación de la herramienta de corte, y moviendo la herramienta de corte alrededor de la línea central usando la plataforma movible en respuesta a la rotación de la herramienta de corte. La plataforma fija puede ser colocada en el área desplazando la plataforma movible sobre un sistema de guía unido a la estructura, hacia el área. La plataforma fija puede unirse a un carro capaz de desplazarse a lo largo del sistema de guía. Las etapas de desplazamiento y realización se pueden controlar mediante una unidad procesadora que ejecuta el código de programa, en el que el código de programa puede definir una pluralidad de operaciones.
De acuerdo con un aspecto de la invención un procedimiento para realizar las operaciones sobre una estructura comprende las etapas de: posicionar una plataforma movible en un área con relación a la estructura para definir un área de trabajo, en la que la plataforma movible está conectada a una herramienta que se desplaza alrededor de una pluralidad de ejes dentro del área de trabajo usando la plataforma movible; desplazar la herramienta a una pluralidad de ubicaciones dentro del área de trabajo usando la plataforma movible; y realizar una operación con la herramienta a través del área de trabajo en cada una de la pluralidad de las ubicaciones usando la plataforma movible.
En una realización preferida el procedimiento además comprende: responder a la realización de la operación con la herramienta a través del área de trabajo en cada una de la pluralidad de las ubicaciones, posicionar la plataforma movible en otra área con relación a la estructura para formar una segunda área de trabajo; desplazar la herramienta a otra pluralidad de ubicaciones dentro de la segunda área de trabajo usando la plataforma movible; y realizar otra operación a través de la segunda área de trabajo en cada una de la otra pluralidad de ubicaciones usando la plataforma movible.
Con otra realización preferida la etapa de desplazamiento comprende: desplazar la plataforma movible sobre un sistema de guía unido a la estructura.
Aún en otra realización preferida la plataforma movible está unida a un carro capaz de desplazarse a lo largo del sistema de guía.
Aún en otra realización preferida las etapas de desplazamiento y realización están controladas por una unidad procesadora que ejecuta el código de programa, en la que el código de programa define una pluralidad de operaciones.
Aún en otra realización preferida el procedimiento además comprende: desplazar la plataforma movible a un número de áreas sobre la estructura, en la que se define un área de trabajo asociada en cada una del número de áreas.
Aún en otra realización preferida el procedimiento además comprende: normalizar la herramienta con relación a la estructura antes de realizar la operación.
Aún en otra realización preferida la máquina cinemática paralela comprende un hexápodo, en el que la herramienta está conectada al hexápodo.
Aún en otra realización preferida la etapa de realización comprende: en cada una de la pluralidad de las ubicaciones, posicionar una herramienta... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento para realizar operaciones sobre una estructura (306; 404; 630; 738) , comprendiendo el procedimiento:
posicionar una plataforma movible (308; 502; 702) en un área con relación a la estructura para definir un área de trabajo (318; 628; 732) , en la que la plataforma movible está conectada a una herramienta (310; 518; 618; 726) que se desplaza alrededor de una pluralidad de ejes (311) dentro del área de trabajo usando la plataforma movible; desplazar la herramienta a una pluralidad de ubicaciones dentro del área de trabajo que usa la plataforma movible; y realizar una operación con la herramienta a través del área de trabajo en cada una de la pluralidad de las ubicaciones que usan la plataforma movible. en el que la pluralidad de ejes proporcionan seis grados de libertad, y en el que la plataforma movible y la herramienta son parte de una máquina cinemática paralela (348) . y posicionar la herramienta y realizar la operación con la plataforma movible, caracterizado porque la plataforma movible está asociada con una plataforma fija (313; 506; 604; 704) y la etapa de posicionar la plataforma movible en el área con relación a la estructura para definir el área de trabajo comprende colocar la plataforma fija en el área con relación a la estructura para definir el área de trabajo, y el área de trabajo está definida por una abertura en la plataforma fija asociada con la plataforma movible, en la que la abertura expones una superficie de la estructura a la herramienta.
2. El procedimiento de la reivindicación 1 que además comprende:
responder a la realización de la operación con la herramienta a través del área de trabajo en cada una de la pluralidad de las ubicaciones, posicionando la plataforma movible en otra área con relación a la estructura para formar una segunda área de trabajo (332) ; desplazar la herramienta a otra pluralidad de ubicaciones dentro de la segunda área de trabajo que usa la plataforma movible; y realizar otra operación a través de la segunda área de trabajo en cada una de la otra pluralidad de las ubicaciones que usan la plataforma movible.
3. El procedimiento de la reivindicación 2, en el que las etapas de desplazamiento comprenden:
desplazar la plataforma movible sobre un sistema de guía (356; 510) unido a la estructura.
4. El procedimiento de la reivindicación 3, en el que la plataforma movible está unida a un carro (354; 508) capaz de desplazarse a lo largo del sistema de guía.
5. El procedimiento de la reivindicación 1, en el que las etapas de desplazamiento y realización son controladas por una unidad procesadora (312) que ejecuta el código de programa (314) , y en el que el código de programa define una pluralidad de operaciones.
6. El procedimiento de la reivindicación 1 que además comprende:
desplazar la plataforma movible a un número de áreas sobre la estructura, en la que se define un área de trabajo asociada en cada una del número de áreas.
7. El procedimiento de la reivindicación 1 que además comprende: normalizar la herramienta con relación a la estructura antes de realizar la operación.
8. El procedimiento de la reivindicación 1, en el que la máquina cinemática paralela comprende un hexápodo (350) , en el que la herramienta está conectada al hexápodo.
9. El procedimiento de la reivindicación 1, en el que la etapa de realización comprende:
en cada una de la pluralidad de las ubicaciones, posicionar una herramienta de corte (338; 730) sobre una superficie (324) de la estructura en una posición seleccionada que está compensada desde una línea central para un orificio que usa la plataforma movible (308) ; responder al posicionamiento de la herramienta de corte, girando la herramienta de corte; responder a la rotación de la herramienta de corte, moviendo la herramienta de corte dentro de la superficie de la estructura que usa la plataforma movible; y responder a la rotación de la herramienta de corte, moviendo la herramienta de corte alrededor de la línea central que usa la plataforma movible.
10. El procedimiento de la reivindicación 1, en el que la operación se selecciona de una operación de perforación,
una operación de remachado, una operación de sondeo, una operación de ajuste, una operación de cierre, una operación de medición, una operación de marcación, y una operación de pintura.
11. El procedimiento de la reivindicación 1, en el que la herramienta se selecciona de una de un taladro, un martillo
neumático para remachar, un aplicador de adhesivo, una pistola de pintura, un láser, una sonda, un taladro ultrasónico, y una máquina sujetadora.
Patentes similares o relacionadas:
Máquina herramienta, del 11 de Marzo de 2020, de Hüttmann, Martin: Máquina herramienta para el mecanizado de piezas de trabajo controlado por ordenador, con un soporte de máquina y al menos dos dispositivos […]
Amortiguador de masa ajustado montado sobre cabezal simétrico, del 27 de Noviembre de 2019, de Fives Machining Systems, Inc: Un amortiguador de masa ajustado montado en un cabezal de máquina herramienta , montado sobre el extremo de un brazo que tiene una […]
Máquina herramienta para la mecanización por arranque de virutas de una pieza de trabajo así como conjunto de soporte de husillo para el empleo en una máquina herramienta de este tipo, del 6 de Noviembre de 2019, de DECKEL MAHO PFRONTEN GMBH: Conjunto de soporte de husillo para el empleo en una máquina herramienta, con: - una sección de alojamiento del brazo articulado que se puede disponer o bien […]
Cabezal de mecanización de giro doble, del 26 de Marzo de 2019, de C.M.S. S.P.A.: Cabezal de mecanización de giro doble con dos ejes controlados (C; A), que comprende: - una primera unidad de control de un primer […]
Máquina herramienta con sistema de amortiguación activa, del 6 de Febrero de 2019, de SORALUCE, S. COOP: Máquina herramienta con sistema de amortiguación activa, comprendiendo • un carnero que tiene una estructura prismática hueca con unas paredes longitudinales […]
 Máquina herramienta que comprende un cabezal de mecanizado, del 27 de Diciembre de 2018, de BRETON, S.P.A.: Máquina herramienta que comprende un manguito y un cabezal de mecanizado , comprendiendo dicho cabezal de mecanizado:
un primer cuerpo conectado al manguito […]
Máquina herramienta que comprende un cabezal de mecanizado, del 27 de Diciembre de 2018, de BRETON, S.P.A.: Máquina herramienta que comprende un manguito y un cabezal de mecanizado , comprendiendo dicho cabezal de mecanizado:
un primer cuerpo conectado al manguito […]
Manipulador de baja inercia para máquinas de corte láser para metales laminares planos, del 28 de Marzo de 2018, de SALVAGNINI ITALIA S.P.A.: Máquina de corte láser para metales laminares planos dispuestos en un plano horizontal, que comprende un cabezal de corte láser y un manipulador con un eje X de movimiento […]
Dispositivo para proporcionar aparatos de sujeción y/o de mecanizado y sistema, del 21 de Febrero de 2018, de ThyssenKrupp System Engineering GmbH: Dispositivo para proporcionar aparatos de sujeción y/o de mecanizado para un manipulador, en particular en una calle de fabricación para la fabricación de carrocerías […]