Extracción de partículas para microscopio de flujo automático.
Un método para localizar automáticamente una frontera de un objeto de interés en un campo de visión,
quecomprende:
formar una imagen electrónica del campo de visión que contiene el objeto, donde la imagen electrónica estáformada por una pluralidad de píxeles de imagen;
identificar grupos de píxeles de imagen que representan segmentos de borde del objeto;
formar primeros parches alrededor de los grupos de píxeles de imagen, donde se dimensiona y se localizacada primer parche para que contenga completamente uno de los respectivos grupos de píxeles de imagen;llevar a cabo un proceso de unión de parches que una cualesquiera dos de los primeros parches juntos quecumplan un umbral de proximidad predeterminado, uno con respecto al otro, para formar un parche unido quese dimensione y localice de manera que contenga completamente los dos primeros parches, donde el procesocontinúa para cualesquiera de los parches primeros y/o unidos que cumpla el umbral de proximidadpredeterminado hasta que no haya parches que cumplan el umbral de proximidad predeterminado; y
asociar todos los segmentos de borde presentes en el interior de uno de los parches unidos restantes comorepresentación de la frontera del objeto.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2003/037014.
Solicitante: IRIS INTERNATIONAL, INC.
Inventor/es: CHAPOULAUD,ERIC.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01N15/14 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 15/00 Investigación de características de partículas; Investigación de la permeabilidad, del volumen de los poros o del área superficial efectiva de los materiales porosos (identificación de microorganismos C12Q). › Investigación por medios electroópticos.
- G06K9/00 G […] › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00).
PDF original: ES-2423319_T3.pdf
Fragmento de la descripción:
Extracción de partículas para microscopio de flujo automático La presente invención se refiere a métodos y sistemas para analizar partículas en una muestra de fluido diluida, y más particularmente a un método y un aparato para localizar automáticamente la frontera de un objeto en un campo de visión.
Los métodos y los sistemas para analizar las partículas en una muestra de fluido diluida son bien conocidos, como se divulga en las patentes de EE.UU. 4.338.024 y 4.393.466. Los analizadores de partículas microscópicos que existen actualmente usan un dispositivo de adquisición de imágenes y un software que detecta partículas basándose en su diferencia de brillo con el fondo. Las patentes de EE.UU. 4.538.299 y 5.625.709 son ejemplos de dichos analizadores. Desafortunadamente, con frecuencia los sistemas empleados en la actualidad y los métodos no pueden detectar eficazmente partículas de bajo contraste, y con frecuencia identifican partes diferentes del mismo objeto como objetos diferentes, lo que da como resultado una clasificación y cantidad de elemento presentada incorrectas.
En un artículo titulado "Sparse-pixel recognition of primitives in engineering drawings" (Machine Vision and Applications (1993) , vol. 6 en las páginas 69 a 82) , D. Dori, Y. Liang, J. Dowell, y I. Chai describen un método de detección de barras, arcos y puntas de flecha en los dibujos de ingeniería de un modo que permite la conversión en datos para una base de datos de diseño asistido por ordenador (CAD) . Las bases se detectan por medio de algoritmos de barrido que determinan la anchura y la longitud de un área de píxeles negros que constituye una barra, explorando direcciones que se modifican en puntos separados a lo largo de los bordes de la barra. Los datos de la barra se almacenan en forma de vector. Debido al ruido, se puede detectar una barra simple en el dibujo en forma de una pluralidad de barras. Se puede reconocer este evento llevando a cabo una serie de ensayos sobre un par de barras. Dicho ensayo implica tomar el rectángulo envolvente más pequeño para cada barra, añadir un margen a este, y comprobar si se produce la intersección de dos rectángulos. Si estos ensayos indican que las barras son sustancialmente colineales y se solapan, se unen los datos de las dos barras para representar una barra individual.
La presente invención proporciona un método para localizar automáticamente una frontera de un objeto de interés en un campo de visión, que incluye formar una imagen electrónica del campo de visión que contiene el objeto, donde la imagen electrónica está formada por una pluralidad de píxeles de imagen, identificando grupos de píxeles de imagen que representan segmentos de borde del objeto, formando primeros parches alrededor de los grupos de píxeles de imagen, donde cada parche está dimensionado y localizado de manera que contenga completamente uno de los respectivos grupos de píxeles de imagen, llevando a cabo un proceso de unión de parches que une cualesquiera dos de los primeros parches juntos que satisfacen un umbral de proximidad predeterminado, uno con respecto al otro, para formar un parche unido que está dimensionado y localizado de manera que contenga completamente los dos primeros parches, continuando el proceso de unión para cualquiera de los parches primero y/o segundo unidos que cumplan el umbral de proximidad predeterminado hasta que no haya parches que cumplan el umbral de proximidad predeterminado, y asociando todos los segmentos de borde presentes en el interior de uno de los parches unidos restantes tal y como representa la frontera del objeto.
La presente invención también proporciona un aparato para localizar automáticamente una frontera de un objeto de interés en un campo de visión, que incluye un sistema de formación de imágenes para formar una imagen eléctrica 45 del campo de visión que contiene el objeto, donde la imagen eléctrica está formada por una pluralidad de píxeles de imagen, y al menos un procesador. Al menos el procesador identifica grupos de píxeles de imagen que representan segmentos de borde del objeto, forma primeros parches alrededor de los grupos de píxeles de imagen, donde cada parche está dimensionado y localizado de manera que contenga completamente uno de los grupos de píxeles de imagen respectivos, y lleva a cabo un proceso de unión de parches que une cualesquiera dos de los primeros parches juntos que cumplen un umbral de proximidad predeterminado, uno con respecto a otro, para formar un parche unido que está dimensionado y localizado de manera que contenga completamente los dos parches unidos. El proceso de unión continúa para cualquiera de los parches unidos primero y/o segundo que cumpla el umbral de proximidad predeterminado hasta que no haya parches que cumplan el umbral de proximidad predeterminado. Dicho al menos un procesador asocia todos los segmentos de borde presentes en el interior de uno de los respectivos 55 parches unidos para representar la frontera del objeto.
A continuación se describirá la invención a modo de ejemplo haciendo referencia a los dibujos adjuntos, en los cuales:
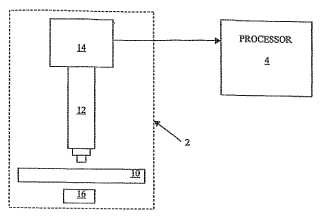
La Figura 1 es un diagrama esquemático de un analizador de partículas que emplea el método de la presente invención.
La Figura 2 es un diagrama de flujo que muestra las etapas de proceso de la presente invención.
La Figura 3 es un diagrama de flujo que muestra las etapas del método para ajustar el nivel de fondo.
La Figura 4 es un diagrama de flujo que muestra las etapas del método para crear imágenes binarias.
La Figura 5 es un ejemplo de matriz de valor de píxel para una imagen binaria ejemplar procedente de las etapas del método de la Figura 4. 5 La Figura 6 es un ejemplo de la matriz de valor de píxel de la Figura 5 tras la detección de borde.
La Figura 7 es un ejemplo de la matriz de valor píxel de la Figura 6 tras la formación de los parches.
La Figura 8A-8C son ejemplos de matriz de valor de píxel de la Figura 7 que ilustran la unión de los parches alrededor de una partícula individual.
El método de la presente invención mejora la detección de partículas para permitir una detección de una combinación de partículas de bajo contraste y partes de objeto. El método incluye 5 etapas básicas, y se puede emplear usando un analizador de partículas convencional que tiene un sistema 2 de formación de imágenes y un procesador 4, como se ilustra esquemáticamente en la Figura 1.
Sistema de formación de imágenes y procesador
Se usa el sistema 2 de formación de imágenes para producir imágenes de campo de visión de una muestra que contiene las partículas de interés. Preferentemente, el sistema 2 de formación de imágenes es un microscopio de flujo bien conocido como se describe en las patentes de EE.UU. 4.338.024, 4.393.466, 4.538.299 y 4.612.614, incorporándose todas por referencia en el presente documento. Dichos sistemas incluyen una célula de flujo 10, un microscopio 12 y una cámara 14, como se muestra en la Figura 1. Se hace pasar el fluido de la muestra que contiene las partículas de interés a través de un área de examen de la célula de flujo 10, en la cual las imágenes de las partículas se pueden ver a través del microscopio de flujo 12. La cámara 14 (que es preferentemente una cámara CDD) captura imágenes de campos de visión sucesivos de las partículas por medio del microscopio 12, a medida que las partículas fluyen a través de la célula de flujo 10, y las convierte en imágenes digitales de partículas. Cada una de las imágenes digitales de partículas tomadas por la cámara 14 comprende miles o incluso millones de píxeles individuales. Preferentemente, se usa una fuente de luz 16 (por ejemplo una marca estroboscópica) para iluminar (por medio de iluminación frontal y/o retroiluminación) el área de examen de la célula de flujo 10. Debe notarse que la presente invención también se puede aplicar a un sistema de formación de imágenes que analiza el fluido de muestra que no fluye (por ejemplo, un fluido de muestra localizado sobre un portaobjetos de exploración) .
El procesador 4 puede ser cualquier microprocesador y/o sistema de ordenador, o una pluralidad de microprocesadores y/o sistemas de ordenador, capaces de procesar las imágenes digitales de partículas como se describe a continuación. Ejemplos de dichos procesadores incluyen, pero sin limitarse a, procesadores de datos, DSP (procesadores de señales digitales) , microcontroladores y procesadores de sistemas de ordenador, cada uno de los cuales puede ser de tipo CSIC y/o RISC.
Método de mejora de la detección de partículas Existen cinco etapas básicas del método de detección de partículas de la presente invención, como viene ilustrado en la Figura... [Seguir leyendo]
Reivindicaciones:
1. Un método para localizar automáticamente una frontera de un objeto de interés en un campo de visión, que comprende:
formar una imagen electrónica del campo de visión que contiene el objeto, donde la imagen electrónica está formada por una pluralidad de píxeles de imagen; identificar grupos de píxeles de imagen que representan segmentos de borde del objeto; formar primeros parches alrededor de los grupos de píxeles de imagen, donde se dimensiona y se localiza cada primer parche para que contenga completamente uno de los respectivos grupos de píxeles de imagen; llevar a cabo un proceso de unión de parches que una cualesquiera dos de los primeros parches juntos que cumplan un umbral de proximidad predeterminado, uno con respecto al otro, para formar un parche unido que se dimensione y localice de manera que contenga completamente los dos primeros parches, donde el proceso continúa para cualesquiera de los parches primeros y/o unidos que cumpla el umbral de proximidad
predeterminado hasta que no haya parches que cumplan el umbral de proximidad predeterminado; y asociar todos los segmentos de borde presentes en el interior de uno de los parches unidos restantes como representación de la frontera del objeto.
2. El método de la reivindicación 1, donde el umbral de proximidad predeterminado es un número predeterminado de píxeles de imagen compartido por cualquiera de los parches primeros y/o unidos que se solapan uno con otro.
3. El método de la reivindicación 1, donde el umbral de proximidad predeterminado es una distancia predeterminada entre cualquiera de los parches primeros y/o unidos.
4. El método de la reivindicación 3, donde la distancia predeterminada se mide a partir de las fronteras de los parches primeros y/o unidos.
5. El método de la reivindicación 3, donde la distancia predeterminada se mide desde las partes de centro de los parches primero y/o unidos.
6. El método de la reivindicación 1, donde el umbral de proximidad predeterminado se calcula a partir de los tamaños y distancias de separación de los parches primeros y/o unidos.
7. El método de la reivindicación 1, donde la formación del parche además comprende dimensionar cada uno de los
parches de la manera más pequeña posible, al tiempo que todavía contengan completamente uno de los grupos de píxeles de imagen.
8. El método de la reivindicación 7, donde tras el dimensionado de los parches de la manera más pequeña posible, la formación de los parches además comprende: expandir cada uno de los parches moviendo las partes de las paredes del parche a partir del centro del parche una distancia predeterminada.
9. El método de la reivindicación 8, donde cada uno de los parches tiene una forma rectangular.
10. El método de la reivindicación 1, donde la identificación de los grupos de píxeles de imagen que representan los
segmentos de borde del objeto comprende: formar una imagen de nivel de fondo del campo de visión, donde la imagen de nivel de fondo está formada por una pluralidad de píxeles de nivel de fondo, que corresponden cada uno en cuanto a localización de uno de los píxeles de imagen y que tienen cada uno un valor de píxel; clasificar como píxel de objeto cada uno de los píxeles de imagen que tenga un valor de píxel que varíe en al menos una cantidad predeterminada a partir del valor de píxel del correspondiente píxel de nivel de fondo; e identificar cuales de los píxeles de objeto corresponden a un borde del objeto.
11. El método de la reivindicación 10, donde la formación de la imagen de nivel de fondo del campo de visión además comprende: formar N imágenes electrónicas de fondo del campo de visión que no contengan ningún objeto de interés, donde cada una de las imágenes electrónicas de fondo está formada por una pluralidad de píxeles de 55 fondo, que corresponden cada uno en cuanto a localización a uno de los píxeles de nivel de fondo y teniendo cada uno un valor de píxel, y donde N es un número entero positivo; y generando cada uno de los píxeles de nivel de fondo por medio del cálculo de un valor medio de los valores de píxel para los píxeles de fondo que corresponde al píxel de nivel de fondo.
12. El método de la reivindicación 11, donde la formación de N imágenes electrónicas de fondo del campo de visión incluye hacer fluir un fluido transparente a través del campo de visión.
13. El método de la reivindicación 11, donde la formación de la imagen de nivel de fondo del campo de visión
además comprende: normalizar valores medios de los valores de píxel de fondo para cada una de las N imágenes 65 electrónicas de fondo antes de la generación de los píxeles de nivel de fondo.
14. El método de la reivindicación 13, donde la normalización de los valores medios de los valores de píxel de fondo además comprende: crear un histograma para cada una de las N imágenes electrónicas de fondo, donde cada uno de los histogramas tiene un valor pico que corresponde al valor más dominante de los valores de píxel de fondo para una de las N imágenes electrónicas de fondo; seleccionar un valor de píxel de normalización predeterminado; y
ajustar los valores de píxel de fondo para las N imágenes electrónicas de fondo de manera que sus histogramas tengan todos valores pico iguales al valor de píxel de normalización predeterminado.
15. El método de la reivindicación 14, donde el valor de píxel de normalización predeterminado está seleccionado de tal forma que los valores de píxel de fondo ajustados no excedan su valor de píxel máximo. 10
16. El método de la reivindicación 10, donde la clasificación como píxel de objeto además incluye: crear una imagen binaria de la imagen electrónica del campo de visión que contiene el objeto, donde la imagen binaria está formada por una pluralidad de píxeles binarios, correspondiendo cada uno, en cuanto a localización a uno de los píxeles de imagen, donde se asigna un primer valor a cada uno de los píxeles binarios si el correspondiente valor de píxel de imagen varía en al menos una cantidad predeterminada a partir del valor de píxel del correspondiente píxel de nivel de fondo, y se asigna un segundo valor si el correspondiente valor de píxel de imagen no varía en al menos la cantidad predeterminada a partir de un valor de píxel del correspondiente píxel de nivel de fondo.
17. El método de la reivindicación 16, donde la identificación en la cual los píxeles de objeto corresponden a un borde del objeto incluye: re-asignar un segundo valor a cualquiera de los píxeles binarios a los cuales se asignó un primer valor, que están rodeados por otros píxeles binarios a todos los cuales se asignó originalmente el primer valor.
18. El método de la reivindicación 1, donde cada uno de los píxeles de imagen tiene un valor, y donde la formación de la imagen electrónica del campo de visión que contiene el objeto además comprende: crear un histograma para la imagen electrónica que contiene el objeto, donde el histograma tiene un valor pico que corresponde al valor más dominante de los valores de píxel de imagen; seleccionar un valor de píxel de normalización predeterminado; y ajustar los valores de píxel de imagen de manera que el histograma tenga un valor pico igual al valor de píxel de normalización predeterminado.
19. Un aparato para localizar automáticamente una frontera de un objeto de interés en un campo de visión, comprendiendo el aparato:
un sistema (2) de formación de imágenes para formar una imagen eléctrica del campo de visión que contiene el
objeto, donde la imagen electrónica está formada por una pluralidad de píxeles de imagen; y al menos un procesador (4) para identificar grupos de píxeles de imagen que representan segmentos de borde del objeto, formando primeros parches alrededor de los grupos de píxeles de imagen, donde cada uno de los primeros parches está dimensionado y posicionado para contener completamente uno de los respectivos grupos de píxeles de imagen, y llevar a cabo un proceso de unión de parche que una cualesquiera dos de los parches primeros juntos que cumplan un umbral de proximidad predeterminado, uno con respecto al otro, para formar un parche unido que se dimensiona y posiciona para contener completamente los dos primeros parches, donde el proceso de unión continua para cualquiera de los parches primeros y/o unidos que cumplan el umbral de proximidad predeterminado hasta que no haya parches que cumplan el umbral de proximidad predeterminado, y dicho procesador (4) asocia todos los segmentos de borde presentes 45 en el interior de uno de los parches unidos restantes para representar la frontera del objeto.
20. El aparato de la reivindicación 19, donde el umbral de proximidad predeterminado es un número predeterminado de píxeles de imagen compartido por cualquiera de los parches primeros y/o unidos que se solapan unos con otros.
21. El aparato de la reivindicación 19, donde el umbral de proximidad predeterminado es una distancia predeterminada entre cualquiera de los parches primeros y/o unidos.
22. El aparato de la reivindicación 21, donde la distancia predeterminada se mide a partir de las fronteras de los parches primeros y/o unidos. 55
23. El aparato de la reivindicación 22, donde la distancia predeterminada se mide a partir de las partes centrales de los parches primeros y/o unidos.
24. El aparato de la reivindicación 19, donde el umbral de proximidad predeterminado se calcula a partir de los 60 tamaño y distancias de separación de los parches primeros y/o unidos.
25. El aparato de la reivindicación 19, donde la formación de los primeros parches por medio de al menos un procesador además comprende: dimensionar cada uno de los parches primeros de la manera más pequeña posible al tiempo que todavía contengan completamente uno de los grupos de píxeles de imagen.
26. El aparato de la reivindicación 25, donde tras el dimensionado de los primeros parches de la manera más pequeña posible, la formación de los parches primeros por medio de al menos un procesador además comprende: expandir cada uno de los primeros parches moviendo las partes de las paredes del parche desde el centro del parche una distancia predeterminada.
27. El aparato de la reivindicación 26, donde cada uno de los parches tiene una forma rectangular.
28. El aparato de la reivindicación 19, donde se identifican los grupos de píxeles de imagen que representan segmentos de borde del objeto por medio de al menos un procesador: formando una imagen de nivel de fondo del
campo de visión, donde la imagen de nivel de fondo está formada por una pluralidad de píxeles de nivel de fondo, correspondiendo cada uno en cuanto a localización, a uno de los píxeles de imagen y teniendo cada uno un valor de píxel; clasificando como píxel de objeto cada uno de los píxeles de imagen que tienen un valor de píxel que varía en al menos una cantidad predeterminada a partir del valor de píxel del correspondiente píxel de nivel de fondo; e identificando cual de los píxeles de objeto corresponde a un borde del objeto.
29. El aparato de la reivindicación 28, donde el sistema forma la imagen de nivel de fondo del campo de visión: formando N imágenes electrónicas de fondo del campo de visión que no contienen ninguno de los objetos de interés, donde cada una de las imágenes electrónicas de fondo está formada por una pluralidad de píxeles de fondo, correspondiendo cada uno, en cuanto a localización, a uno de los píxeles de nivel de fondo y teniendo cada uno un valor de píxel, y donde N es un número entero positivo, y generando cada uno de los píxeles de nivel de fondo calculando un valor medio de los valores de píxel para los píxeles de fondo que corresponden al píxel de nivel de fondo.
30. El aparato de la reivindicación 29, donde el sistema hace fluir un fluido transparente a través del campo de visión 25 para formar N imágenes electrónicas de fondo del campo de visión.
31. El aparato de la reivindicación 29, donde al menos un procesador forma la imagen de nivel de fondo del campo de visión: normalizando los valores medios de los valores de píxeles de fondo para cada una de las N imágenes electrónicas de fondo antes de la generación de los píxeles de nivel de fondo.
32. El aparato de la reivindicación 31, donde al menos un procesador normaliza los valores medios de los valores de píxeles de fondo: creando un histograma para cada una de las N imágenes electrónicas de fondo, donde cada uno de los histogramas tiene un valor pico que corresponde al valor más dominante de los valores de píxeles de fondo para una de las N imágenes electrónicas de fondo; seleccionando un valor de píxel de normalización predeterminado; y ajustando los valores de píxeles de fondo para las N imágenes electrónicas de fondo de manera que sus histogramas tengan todos valores de pico iguales al valor de píxel de normalización predeterminado.
33. El aparato de la reivindicación 32, donde al menos un procesador selecciona el valor de píxel de normalización predeterminado de manera que los valores de píxel de fondo ajustados no excedan su valor de píxel máximo. 40
34. El aparato de la reivindicación 28, donde al menos un procesador clasifica los píxeles de objeto: creando una imagen binaria de la imagen electrónica del campo de visión que contiene el objeto, donde la imagen binaria está formada por una pluralidad de píxeles binarios, correspondiendo cada uno, en cuanto a localización, a uno de los píxeles de imagen, donde se asigna un primer valor a cada uno de los píxeles binarios si el correspondiente valor de 45 píxel de imagen varía en al menos una cantidad predeterminada a partir del valor de píxel del correspondiente píxel de nivel de fondo, y se asigna un segundo valor si el correspondiente valor de píxel de imagen no varía en al menos la cantidad predeterminada a partir del valor de píxel del correspondiente píxel de nivel de fondo.
35. El aparato de la reivindicación 34, donde al menos un procesador identifica cual de los píxeles de objeto 50 corresponde a un borde del objeto: re-asignando un segundo valor a cualquiera de los píxeles binarios a los cuales se asignó un primer valor, que están rodeados por otros píxeles binarios a todos los cuales se asignó originalmente el primer valor.
36. El aparato de la reivindicación 19, donde cada uno de los píxeles de imagen tiene un valor, y donde al menos un 55 procesador forma la imagen electrónica del campo de visión que contiene el objeto además: creando un histograma para la imagen electrónica que contiene el objeto, donde el histograma tiene un valor pico que corresponde al valor más dominante de los valores de píxel de imagen; seleccionar un valor de píxel de normalización predeterminado; y ajustar los valores de píxel de imagen de manera que el histograma tenga un valor pico igual al valor de píxel de normalización predeterminado.
Patentes similares o relacionadas:
Método y aparato de autentificación de identidad, terminal y servidor, del 29 de Julio de 2020, de Advanced New Technologies Co., Ltd: Un método de autenticación de identidad, en donde el método comprende: adquirir información de rasgos faciales de un usuario y utilizar la información […]
 Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Dispositivo de procesamiento de imágenes, método de procesamiento de imágenes y programa, del 29 de Julio de 2020, de RAKUTEN, INC: Dispositivo de procesamiento de imágenes, que comprende: medios de obtención de imágenes captadas para la lectura de datos […]
PROCEDIMIENTO Y DISPOSITIVO DE REGISTRO AUTOMÁTICO DE LA LOCOMOCIÓN DE NEMATODOS U ORGANISMOS PEQUEÑOS DE TAMAÑOS SIMILARES POR INTERFEROMETRÍA TEMPORAL DE MICROHACES DE LUZ, del 23 de Julio de 2020, de PHYLUMTECH S.A: Procedimiento y dispositivo de registro automático de la locomoción de nematodos u organismos pequeños de tamaños similares por interferometría temporal de microhaces […]
MÉTODO PARA LA ELIMINACIÓN DEL SESGO EN SISTEMAS DE RECONOCIMIENTO BIOMÉTRICO, del 2 de Julio de 2020, de UNIVERSIDAD AUTONOMA DE MADRID: Método para eliminación del sesgo (por edad, etnia o género) en sistemas de reconocimiento biométrico, que comprende definir un conjunto de M muestras de Y personas […]
Cámara inteligente para compartir fotografías automáticamente, del 1 de Julio de 2020, de QUALCOMM INCORPORATED: Un procedimiento para compartir una imagen final utilizando un dispositivo, en el que el procedimiento es realizado por un servidor y comprende: […]
Método, dispositivo de generación de imagen y sistema para generar una medición de autenticidad de un objeto, del 1 de Julio de 2020, de SICPA HOLDING SA: Un método, llevado a cabo por un dispositivo de generación de imagen , para generar una medición de autenticidad de un objeto o para contribuir en la generación […]
Estimación de una postura basada en la silueta, del 24 de Junio de 2020, de VIZRT AG: Un método implementado por ordenador para estimar una postura de un modelo de objeto articulado , en el que el modelo de objeto articulado […]