Visión por espejo láser.
Procedimiento para determinar una imagen tridimensional de un objeto mOvil (2),
cuyo procedimiento comprende
de manera repetitiva las siguientes etapas:
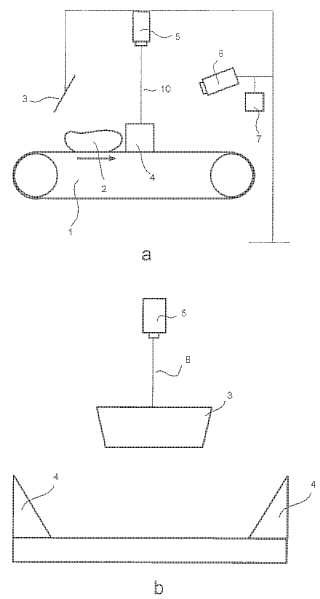
a) captación de una imagen bidimensional del objeto (2) con un nnedio de captaci6n (6), comprendiendo laimagen captada un elemento de escaneado basado en una reflexion de un haz de luz piano (10)procedente del objeto (2) y un elemento de escaneado basado en una reflexi6n del haz de luz piano (10)procedente del objeto, reflejado adicionalmente desde una serie de medios reflectores,
b) dividir la imagen bidimensional en un minim° de dos partes de la imagen, de manera que una parte (15)de la imagen comprende una reflexi6n del haz de luz piano (10) procedente del objeto (2) y, como minim°,una parte de imagen (15) comprende una reflexion del haz de luz piano (10) desde, como minimo, uno dedichos medios reflectores (4), y
c) transformar las partes de imagen en una parte de objeto comun bidimensional por medio de un procesode transformación,mientras el objeto (2) es sometido al haz de luz piano (10) y, basandose en la pluralidad de las imagenesbidimensionales en la parte del objeto, se define una imagen tridimensional,de manera que los medios reflectores (4) comprenden, como minimo, un espejo lateral y, como minim°, un espejoretrovisor (24) adaptados para visionar partes de imagen lateral y de imagen superior del objeto (2).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IS2002/000004.
Solicitante: MAREL HF..
Nacionalidad solicitante: Islandia.
Dirección: Austurhrauni 9 210 Gardabaer ISLANDIA.
Inventor/es: HALLVARDSSON,KRISTJAN, ANDERSEN,KRISTINN, NARFASON,SIGURBJORN, ERLINGSSON,VIDAR.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B11/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00).
- G01B11/25 G01B […] › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › mediante la proyección de un patrón, p. ej.franjas de Moiré, sobre el objeto (G01B 11/255 tiene prioridad).
- G01F17/00 G01 […] › G01F MEDIDA DEL VOLUMEN, FLUJO VOLUMETRICO, FLUJO MASICO O NIVEL DE LIQUIDOS; DOSIFICACION VOLUMETRICA. › Métodos o aparatos para la determinación de la capacidad de recipientes o cavidades o del volumen de cuerpos sólidos (medida de dimensiones lineales para determinar el volumen G01B).
- G06K9/00 G […] › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00).
- G06T7/00 G06 […] › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
- H04N13/02
PDF original: ES-2389495_T3.pdf
Fragmento de la descripción:
Visión por espejo láser
Sector de la invención
La presente invención se refiere a un procedimiento y a un aparato para determinar una imagen tridimensional de un objeto móvil por medio de dispositivos de reflexión, tales como espejos y un haz plano de luz, tal como un haz de láser.
Descripción de anterioridades
La determinación de una imagen tridimensional de elementos alimenticios transportados es una tarea importante para la industria alimentaria. Cuando el proceso comprende la clasificación por forma, dimensiones y peso, es necesaria información respecto al volumen y estructura del elemento alimenticio.
El documento US 5.184.733 describe un procedimiento y aparato para determinar el volumen, forma y peso de objetos. Una cámara de escaneado lineal ("linescan") registra una vista en planta del objeto y al mismo tiempo registra una vista en perfil del mismo a través de un espejo dispuesto sobre un soporte fijo en un lado de un transportador. A partir de estos datos, se determina la anchura y altura del objeto. De acuerdo con ello, la imagen de composición del objeto consiste de muchas secciones transversales siendo medida la anchura y grosor máximos del objeto en cada una de las secciones.
En el documento US 4.979.815, se da a conocer un sistema para la formación de imágenes a distancia para producir una imagen a distancia de un área de la superficie de un objeto. Ello se utiliza proyectando un haz sustancialmente plano de luz sobre una superficie del objeto para iluminar la superficie a lo largo de una banda de luz. El haz de luz iluminado es observado y convertido en una imagen que genera la imagen a distancia del objeto. Una imagen 3D del objeto se forma al desplazar el objeto mientras este es escaneado.
El problema con la solución que se describe en el documento USo 5.184.733 es la inexactitud del mismo. Al determinar solamente la anchura y altura del objeto, los errores pueden ser muy importantes, especialmente cuando el objeto tiene estructura irregular.
Este problema se resuelve, solamente en parte en el documento USo 4.979.815, al visionar un haz de luz sobre la superficie del objeto. Al medir solamente la vista superior y la imagen en perfil, la estimación del volumen puede ser también inexacta, especialmente cuando los objetos tienen forma irregular. Utilizando un haz plano de luz situado por encima del objeto móvil, solamente se puede detectar la parte visible del objeto dirigida hacia los medios de captación, de lo que se puede formar una imagen bidimensional. Partes del objeto, tales como partes de la superficie que no están en la línea de visión desde el punto de visión de los medios de captación, así como todas las partes dirigidas hacia abajo del objeto, no serán visibles para los medios de captación y, por lo tanto, aparecen en blanco en la imagen captada. Esto provoca un incremento de la incertidumbre de la medición. El documento DE 3805455 da a conocer un dispositivo para escaneado fotoeléctrico y medición tridimensional de madera. Mediante la utilización de una fuente de luz, espejos y una cámara de escaneado, la imagen es dividida en regiones, y un ordenador es utilizado para transformar datos para obtener mediciones de objetos. De acuerdo con ello, existe la necesidad de mejoras adicionales en la determinación de volumen de objetos sometidos a movimiento.
Descripción general de la invención
Es un objetivo de la presente invención aumentar la exactitud de la determinación de una imagen tridimensional de un objeto móvil por medio de la detección adicional de las áreas del objeto no visibles por visión directa.
De acuerdo con el primer aspecto, la presente invención se refiere a un procedimiento para determinar una imagen tridimensional de un objeto móvil, de acuerdo con la presente reivindicación 1.
Los medios de transporte pueden ser una cinta transportadora, y el haz plano de luz puede ser una haz láser y una lente cilíndrica o un espejo vibrante para producir un haz plano de luz, que está situado por encima del objeto móvil y en el que el plano del haz de luz es perpendicular a la dirección de movimiento del objeto. Al entrar el objeto en la luz, esta es reflejada desde el objeto hacia los medios de captación y desde los medios de reflexión hacia el objeto, de manera que la reflexión comprende una serie de elementos de exploración. La frecuencia de captación de una imagen bidimensional se podría controlar por un ordenador, de manera que cuando no se detecta imagen de perfil, el proceso de la imagen es mínimo y la frecuencia de escaneado es máxima, facilitando una resolución máxima para localizar el borde del objeto que cruza la luz en primer lugar. Tan pronto como el objeto entra en la luz, la magnitud de proceso por línea de escaneado aumenta y la frecuencia de escaneado se puede disminuir o ajustar al valor deseado.
El proceso de la imagen se repite mientras el objeto está sometido a un haz de luz plano. Basándose en una serie de dichas imágenes bidimensionales en el dominio o región del objeto, se define una imagen tridimensional y se puede determinar el volumen. Al variar la velocidad de proceso, se varía la resolución de la imagen tridimensional. Una velocidad de proceso elevada llevaría a elevada resolución de las imágenes, y al revés. Al pesar el objeto, la distribución de masa puede ser adicionalmente determinada. Esta es una característica importante para la formación de lotes, de manera que la distribución de masa se utiliza para cortar el objeto, de acuerdo con un criterio predefinido, de manera que dicho criterio se basa en la velocidad de los medios de movimiento y de la distribución de la masa.
Se pueden determinar características adicionales, tales como la rugosidad de la superficie del objeto, de manera que la irregularidad de la línea de contorno de la imagen de perfil bidimensional se utiliza como indicador de la rugosidad, en la que una superficie lisa es reflejada en una línea de contorno irregular. Además, al captar colores se puede determinar información con respecto a características tales como grasa y músculo. La rugosidad, color, reflectividad y absorción de la luz se pueden relacionar también con el estado del material, tal como porosidad, composición química o contenido de agua.
Los medios de reflexión pueden comprender, como mínimo, un espejo del primer lado, que se puede disponer paralelamente a la dirección de movimiento del objeto y en el plano del haz plano de luz, de manera que la imagen de visión lateral del objeto se puede detectar y, como mínimo, un espejo posterior. En una realización, el número de dichos, como mínimo, un espejo lateral es de dos, dispuestos paralelamente a la dirección de movimiento junto con un espejo posterior, situado en una localización aproximadamente opuesta a los medios de captación, en el otro lado del plano del haz de luz. El ángulo entre el plano del espejo posterior y el haz plano de luz sería tal que la reflexión de la luz que es reflejada en oposición a los medios de captación al espejo posterior, sería captado por los medios de captación. El número de medios de captación puede ser, no obstante, diferente, y no están restringido a la utilización de un solo espejo posterior o de solamente dos espejos laterales.
El espejo lateral posibilita la visión de partes de la imagen lateral del objeto que de otro modo no serían detectables desde los medios de captación, tales como las partes dirigidas hacia abajo. Por otra parte, se pueden captar partes superficiales que no están en la línea de visión de los medios de captación a través del espejo posterior. Por lo tanto, las imágenes que captan los medios de captación son la forma reflejada del objeto, la imagen reflejada del espejo lateral y la imagen reflejada del espejo posterior.
Para incrementar la eficacia del rendimiento en los medios de captación, tales como la resolución, se podría situar por lo menos un segundo espejo lateral entre el, como mínimo, un primer espejo lateral y el, como mínimo, un espejo posterior. En esta realización, el objeto del, como mínimo, un primer espejo lateral, es el de reflejar el haz de láser por debajo del lado del objeto hacia el, como mínimo, un segundo espejo lateral. El, como mínimo, un segundo espejo lateral quedaría posicionado de manera tal que disminuyera el ángulo de visión de los medios de detección y, por lo tanto, incrementaría el rendimiento de los medios de captación. En vez de captar la imagen de la vista lateral desde, como mínimo,... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para determinar una imagen tridimensional de un objeto móvil (2) , cuyo procedimiento comprende de manera repetitiva las siguientes etapas:
a) captación de una imagen bidimensional del objeto (2) con un medio de captación (6) , comprendiendo la imagen captada un elemento de escaneado basado en una reflexión de un haz de luz plano (10) procedente del objeto (2) y un elemento de escaneado basado en una reflexión del haz de luz plano (10) procedente del objeto, reflejado adicionalmente desde una serie de medios reflectores, b) dividir la imagen bidimensional en un mínimo de dos partes de la imagen, de manera que una parte (15) de la imagen comprende una reflexión del haz de luz plano (10) procedente del objeto (2) y, como mínimo, una parte de imagen (15) comprende una reflexión del haz de luz plano (10) desde, como mínimo, uno de dichos medios reflectores (4) , y c) transformar las partes de imagen en una parte de objeto común bidimensional por medio de un proceso de transformación,
mientras el objeto (2) es sometido al haz de luz plano (10) y, basándose en la pluralidad de las imágenes bidimensionales en la parte del objeto, se define una imagen tridimensional, de manera que los medios reflectores (4) comprenden, como mínimo, un espejo lateral y, como mínimo, un espejo retrovisor (24) adaptados para visionar partes de imagen lateral y de imagen superior del objeto (2) .
2. Procedimiento, según la reivindicación 1, en el que la transformación de las partes de la imagen en una parte común del objeto comprende la transformación de cada elemento escaneado en la parte de la imagen con una función de transformación adaptada para transformar dicha parte específica de la imagen en la parte común del objeto.
3. Procedimiento, según la reivindicación 1 ó 2, en el que la función de transformación comprende transformación de traslación.
4. Procedimiento, según cualquiera de las reivindicaciones anteriores, en el que la función de transformación comprende transformación de rotación.
5. Procedimiento, según cualquiera de las reivindicaciones anteriores, en el que la función de transformación comprende transformación de escalado.
6. Procedimiento, según cualquiera de las reivindicaciones anteriores, en el que la parte común del objeto proporciona las coordenadas del perfil de sección transversal bidimensional de la imagen.
7. Procedimiento, según cualquiera de las reivindicaciones anteriores, en el que la transformación de las partes de imagen en la parte de objeto común se basa en una base de datos, de manera que las coordenadas de los elementos escaneados de la imagen en las partes de la imagen reciben nuevas coordenadas, de acuerdo con dichas transformaciones en la parte de objeto común.
8. Procedimiento, según cualquiera de las reivindicaciones anteriores, en el que el haz de luz plano (10) está situado por encima del objeto móvil (2) , y en el que el plano del haz de luz (10) es perpendicular a la dirección de movimiento del objeto (2) .
9. Procedimiento, según la reivindicación 1, en el que el, como mínimo un espejo retrovisor posterior (14) , es un único espejo retrovisor posterior situado en oposición a los medios de captación (6) y por encima del objeto móvil.
10. Procedimiento, según cualquiera de las reivindicaciones anteriores, en el que el lado reflectante de dicho, por lo menos, un espejo retrovisor posterior (24) está dispuesto en perpendicular a la dirección de movimiento del objeto
(2) .
11. Procedimiento, según cualquiera de las reivindicaciones anteriores, en el que, como mínimo un espejo lateral (22, 23) está dispuesto a lo largo de la dirección de movimiento del objeto (2) y en el plano del haz de luz plano (10) , de manera que la luz es reflejada desde el espejo hacia el objeto (2) y retorna al espejo, permitiendo por lo tanto que la imagen de la vista lateral del objeto (2) , que de otro modo no es detectable por los medios de captación (6) , sea detectable.
12. Procedimiento, según cualquiera de las reivindicaciones anteriores, en el que dicho, como mínimo un espejo lateral (22, 23) está dispuesto paralelamente a la dirección de movimiento del objeto (2) .
13. Procedimiento, según cualquiera de las reivindicaciones anteriores, en el que la fuente de luz, los medios de captación, dicho como mínimo un espejo lateral (22, 23) , Y dicho como mínimo un espejo retrovisor posterior (24) son acoplados y montados como una unidad en posición fija, de manera que dicho, como mínimo un primer espejo
lateral (22, 23) está situado entre los medios de captación (6) , y dicho como mínimo un espejo retrovisor posterior (24) .
14. Procedimiento, según cualquiera de las reivindicaciones anteriores, en el que los medios de movimiento están constituidos por una cinta transportadora (1) .
15. Procedimiento, según cualquiera de las reivindicaciones anteriores, en el que la frecuencia de captación de una imagen bidimensional está controlada por los medios de captación (6) , de manera que, cuando no se detecta imagen de perfil, el proceso de la imagen es mínimo y la frecuencia de escaneado es máxima.
16. Procedimiento, según cualquiera de las reivindicaciones anteriores, en el que se calcula, a partir de la imagen tridimensional, el volumen total del objeto (2) .
17. Procedimiento, según cualquiera de las reivindicaciones anteriores, en el que, por la pesada del objeto (2) y utilizando la información relativa al volumen total del objeto (2) se determina la distribución de la masa.
18. Procedimiento, según cualquiera de las reivindicaciones anteriores, en el que la distribución de la masa es utilizada para el corte del objeto (2) .
19. Procedimiento, según cualquiera de las reivindicaciones anteriores, en el que la pureza de la línea de contorno obtenida a partir de la imagen de perfil bidimensional del objeto (2) es utilizada como indicador de la rugosidad superficial del objeto.
20. Procedimiento, según cualquiera de las reivindicaciones anteriores, en el que los medios de captación (6) comprenden medios para la captación del color y en el que el color es utilizado como indicador del contenido de grasas y/o contenido de músculo y/o contenido de agua y/o composición química.
21. Aparato para la determinación de una imagen tridimensional de un objeto móvil, cuyo aparato comprende:
• un transportador (1) para el transporte del objeto,
• una pluralidad de medios reflectores (4) que comprende, como mínimo, un espejo lateral (22, 23) ,
• medios de captación (6) para captar una imagen bidimensional del objeto (2) mientras el objeto (2) está siendo transportado, comprendiendo la imagen captada un elemento de escaneado basado en la reflexión de un haz plano de luz (10) desde el objeto (2) y un elemento de escaneado basado en la reflexión del haz plano de luz (10) desde el objeto, reflejado adicionalmente desde los medios reflectantes (4) ,
• un sistema de ordenador para almacenar las imágenes captadas y para dividir la imagen bidimensional en un mínimo de dos partes de imagen, en el que una parte de imagen comprende una reflexión del haz plano de luz (10) procedente del objeto (2) y, como mínimo una parte de imagen comprende una reflexión del haz plano de luz desde, como mínimo, uno de dichos medios reflectantes (4) , y transformar las partes de imagen en una parte de objeto común bídimensional por medio de un proceso de transformación, mientras el objeto
(2) está siendo sometido al haz plano de luz (10) , y basado en la pluralidad de las imágenes bidimensionales en la parte del objeto, generar una imagen tridimensional del objeto,
• caracterizado porque el dispositivo reflectante (4) comprende, como mínimo, un espejo retrovisor (24) adaptado para visionar imágenes de las partes lateral y superior del objeto (2) .
Patentes similares o relacionadas:
Método y aparato de autentificación de identidad, terminal y servidor, del 29 de Julio de 2020, de Advanced New Technologies Co., Ltd: Un método de autenticación de identidad, en donde el método comprende: adquirir información de rasgos faciales de un usuario y utilizar la información […]
 Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Dispositivo de procesamiento de imágenes, método de procesamiento de imágenes y programa, del 29 de Julio de 2020, de RAKUTEN, INC: Dispositivo de procesamiento de imágenes, que comprende: medios de obtención de imágenes captadas para la lectura de datos […]
PROCEDIMIENTO Y DISPOSITIVO DE REGISTRO AUTOMÁTICO DE LA LOCOMOCIÓN DE NEMATODOS U ORGANISMOS PEQUEÑOS DE TAMAÑOS SIMILARES POR INTERFEROMETRÍA TEMPORAL DE MICROHACES DE LUZ, del 23 de Julio de 2020, de PHYLUMTECH S.A: Procedimiento y dispositivo de registro automático de la locomoción de nematodos u organismos pequeños de tamaños similares por interferometría temporal de microhaces […]
MÉTODO PARA LA ELIMINACIÓN DEL SESGO EN SISTEMAS DE RECONOCIMIENTO BIOMÉTRICO, del 2 de Julio de 2020, de UNIVERSIDAD AUTONOMA DE MADRID: Método para eliminación del sesgo (por edad, etnia o género) en sistemas de reconocimiento biométrico, que comprende definir un conjunto de M muestras de Y personas […]
Cámara inteligente para compartir fotografías automáticamente, del 1 de Julio de 2020, de QUALCOMM INCORPORATED: Un procedimiento para compartir una imagen final utilizando un dispositivo, en el que el procedimiento es realizado por un servidor y comprende: […]
Método, dispositivo de generación de imagen y sistema para generar una medición de autenticidad de un objeto, del 1 de Julio de 2020, de SICPA HOLDING SA: Un método, llevado a cabo por un dispositivo de generación de imagen , para generar una medición de autenticidad de un objeto o para contribuir en la generación […]
Estimación de una postura basada en la silueta, del 24 de Junio de 2020, de VIZRT AG: Un método implementado por ordenador para estimar una postura de un modelo de objeto articulado , en el que el modelo de objeto articulado […]