Dispositivo portátil para la medida de mapas de desplazamientos de superficies en las tres direcciones espaciales.
Dispositivo optoelectrónico portátil como el mostrado en la Figura 1,
que permite realizar medidas de desplazamientos de campo completo de una superficie en las tres direcciones espaciales. Consiste en un subsistema de adquisición de imágenes que visualiza la superficie a medir, un subsistema de iluminación que proyecta luz estructurada sobre dicha superficie, un subsistema de alineación y calibración, y un subsistema de procesado y control que controla el dispositivo y realiza un procesado de las imágenes. El dispositivo se basa en la combinación de dos técnicas, una para obtener la deformación fuera de plano (por ejemplo proyección de franjas) y otra para obtener la deformación en el plano (por ejemplo correlación digital de imágenes 2D). La novedad del dispositivo es que permite hacer un alineamiento, una calibración y una corrección de los desplazamientos necesarios para obtener resultados cuantitativos y veraces.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201330411.
Solicitante: UNIVERSIDAD DE ALCALA..
Nacionalidad solicitante: España.
Inventor/es: SIEGMANN,PHILIP, DIAZ GARRIDO,FRANCISCO A, FELIPE SESÉ,Luis.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B11/16 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de la deformación de un sólido, p. ej. galga extensiométrica óptica.
- G01B9/02 G01B […] › G01B 9/00 Instrumentos según se especifica en los subgrupos y caracterizados por la utilización de medios de medida ópticos (disposiciones para la medida de parámetros particulares G01B 11/00). › Interferómetros.
- H04N13/02

Fragmento de la descripción:
DISPOSITIVO PORTÁTIL PARA LA MEDIDA DE MAPAS DE DESPLAZAMIENTOS DE SUPERFICIES EN LAS TRES DIRECCIONES ESPACIALES
SECTOR DE LA TÉCNICA
El dispositivo tiene aplicación en todos aquellos sectores que requieran del estudio del comportamiento mecánico de objetos, como en el sector aeroespacial y de la automoción, o en cualquier otro orientado hacia el desarrollo de nuevos materiales, análisis del comportamiento estructural y dimensional de piezas, o control de la calidad, entre otros. Otro campo potencial es el sector médico y la biomecánica al permitir, por ejemplo, evaluar las deformaciones sufridas por tejidos o prótesis ante esfuerzos externos. Se destaca su aplicabilidad en el estudio de materiales que presentan una capacidad de deformación grande (plásticos, siliconas, caucho, tejidos elásticos,...).
ESTADO DE LA TÉCNICA
Como medidas de "campo completo" o "mapas" de desplazamientos se entienden las medidas de los desplazamientos que experimenta cada elemento de superficie de un objeto visualizado por una cámara cuando éste es deformado. Esto es, para cada píxel de la imagen de la superficie se obtiene su valor de desplazamiento (en nuestro caso en cada una de las tres direcciones espaciales (x,y,z)) cuando el material es sometido a un esfuerzo externo. Este tipo de medidas permite, por ejemplo, localizar zonas de concentración de esfuerzo/deformación y, por lo tanto, de mayor probabilidad de rotura. El propósito del dispositivo de la presente patente no es pues sólo una reconstrucción tridimensional de un objeto como se presenta por ejemplo en [1] y [2],
Probablemente la técnica comercialmente disponible que actualmente más se está utilizando para medir cómo se deforma la superficie de un objeto es la de Correlación Digital de Imágenes (CDI) [3], pues permite medir rangos de desplazamientos muy grandes, con una resolución variable según el tipo de lente que se utilice y en tiempo real (a velocidad de captura de la cámara). La CDI sólo requiere que la superficie de estudio tenga o esté pintada de un moteado aleatorio. Existen otras técnicas, también disponibles comercial mente, de mucha mayor resolución basadas en fenómenos de ¡nterferometría (por ejemplo "ESPI" o "Sherografía") que, no obstante, no son tan versátiles como la de CDI al medir en un rango de unas décimas de mieras a varias decenas de mieras [4-6].
Otra gran ventaja de la técnica de correlación, es que permite medir deformaciones en las tres direcciones espaciales (no solamente las que se producen en el plano (x,y) o en dirección-z fuera de plano). Ésta técnica se conoce como la de Correlación Digital de Imágenes 3D (CDI-3D). La técnica de CDI se basa en hacer un seguimiento de los píxeles de la imagen de la superficie del objeto de estudio a medida que esta superficie se deforma. Estos píxeles se identifican en cada imagen gracias a que su entorno presenta un patrón de intensidad aleatorio (debido al moteado aleatorio) que se puede reconocer y localizar en cada una de las imágenes del objeto en distintos estados de deformación mediante un proceso de correlación. En CDI-3D este seguimiento de los elementos de superficie se hace en 3D, por lo que se requiere además de una reconstrucción 3D del objeto en cada estado de deformación. Esta reconstrucción se realiza mediante una estéreo-triangulación a partir de las imágenes obtenidas por, al menos, dos cámaras que visualizan la misma superficie de estudio del objeto desde distintos puntos de vista. Las cámaras deben estar, por lo tanto, perfectamente calibradas [7,8] (se deben conocer sus parámetros intrínsecos y extrínsecos) y sincronizadas. La técnica de CDI-3D requiere pues de un mínimo de dos cámaras sincronizadas (que en el caso de alta velocidad es económicamente costoso), una calibración de las cámaras que requiere de un elevado número de imágenes de un objeto patrón y un complejo procesado para determinar los parámetros intrínsecos y extrínsecos de las cámaras necesarias para la estéreo-triangulación, y otros tres procesados de correlación digital para cada estado de deformación (dos para la estéreo- triangulación y uno más para el seguimiento de los píxeles). En [9] se propone un aparato para la medida de la deformación 3D de tejidos a alta velocidad mediante una estereo- reconstrucción y correlación digital de imágenes.
Una técnica alternativa a la de CDI-3D es la que combina Correlación Digital de Imágenes 2D (CDI-2D) con Proyección de Franjas (PF) [10], En este caso se utiliza una única cámara y un proyector que proyecta lateralmente franjas paralelas y equiespaciadas e ilumina la superficie de estudio. Con CDI-2D se determina la deformación del objeto (previamente pintado con un moteado aleatorio) en un plano (x,y) perpendicular al eje óptico de la cámara (eje-z), y con PF se determina la deformación fuera de plano, esto es, en dirección z.
El dispositivo objeto de la presente patente se basa en esta técnica combinada de PF y CDI-2D (que designaremos abreviadamente como PF+CDI) tal y como se describe en [10]. Comparado con la técnica de CDI-3D, la técnica combinada PF+CDI sólo utiliza una única
cámara (sustituyendo la otra cámara por un proyector de franjas), la calibración que se plantea realizar con el dispositivo es más sencilla al requerir sólo de dos imágenes y el procesado de imágenes en general es mucho más simple y computacionalmente menos costoso. A cambio, FP+CDI requiere de una precisa alineación del dispositivo con respecto a una superficie de referencia (que puede ser la propia superficie del objeto de estudio sin deformar) con respecto a la cual se miden los desplazamientos fuera de plano.
EXPLICACIÓN DE LA INVENCIÓN
Como se acaba de comentar, el dispositivo PF+CDI objeto de la presente patente se basa en la técnica combinada de Proyección de Franjas (para obtener la información de los desplazamientos "fuera de plano" o dirección-z) y la de Correlación Digital de Imágenes 2D (para obtener los desplazamientos "en plano" o direcciones -x e -y). Si bien, otra posibilidad para obtener la deformación fuera de plano es mediante la técnica de proyección de luz estructurada ("Structured Light projection") o aleatoria ("speckle projection") [11,12], En cualquier caso, para obtener resultados cuantitativos y veraces, esta técnica combinada requiere de los siguientes tres procesos:
1. Una alineación con respecto al objeto de estudio
2. Un calibrado y
3. Una corrección de los desplazamientos (si la lente utilizada no es telecéntrica).
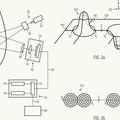
Estos tres procesos se resuelven con el dispositivo PF+CDI que se presenta de forma esquemática en la Figura 1. El dispositivo PF+CDI consta de las siguientes partes: Un subsistema de adquisición de imágenes consistente en una cámara digital (1) con su correspondiente lente, un subsistema de iluminación consistente en un proyector (2) que proyecta luz estructurada (en el caso de la Figura 1, franjas paralelas y equiespaciadas) sobre la superficie del objeto de estudio, y un subsistema de alineación y calibración consistente en un láser (3), una plataforma deslizante a lo largo de un eje (4), una plataforma inclinable en torno a dos ejes (5) y un cabezal inclinable (6) que soporta al conjunto del dispositivo con dos mandos (7) y (8) que permiten rotarlo en torno a dos ejes perpendiculares entre si y perpendiculares al eje óptico de la cámara digital. Finalmente, el dispositivo incluye también un subsistema de procesado de imágenes y control del dispositivo (9).
DESCRIPCIÓN DE LAS FIGURAS
Figura 1. Esquema del dispositivo objeto de la presente patente en el que se muestran las distintas partes que lo componen.
Figura 2. a) y b) son las imágenes adquiridas por el dispositivo de la superficie de referencia (membrana de silicona plana sin deformar) a distancia z0+Az y z0 respectivamente. De estas dos imágenes se obtienen las correspondientes imágenes de sólo franjas c) y d), y las imágenes de sólo moteado e) y f). La imagen g) muestra en la gráfica superior los perfiles horizontales trazados por la mitad de la imágenes de franjas c) y d), y en la parte inferior el desfase entre estos perfiles de franjas. En h) se muestra la imagen con los valores de la constante de franja obtenidos para cada píxel de la región de interés, i) Muestra el resultado de aplicar CDI-2D a las imágenes e) y f), obteniéndose el "cono de desplazamiento radial" (CDR).
Figura 3. Una vez alineado y calibrado el dispositivo se adquieren las imágenes de la membrana de silicona. a) Es la imagen sin deformar (la de referencia), b) Se muestra la forma en la que es deformada la membrana. De c) a f) son las imágenes adquiridas de la membrana en los distintos estados de deformación (Azst¡ck=5,10,15 y 20...
Reivindicaciones:
1. Dispositivo portátil para la medida de mapas de desplazamientos de superficies en las tres direcciones espaciales que permite llevar a cabo una alineación y una calibración de un sistema optoelectrónico que combina dos técnicas para obtener respectivamente los mapas de desplazamiento en el plano y fuera de plano de la superficie de un objeto. Este dispositivo comprende:
a. Un subsistema de adquisición de imágenes formado por una cámara digital y su correspondiente lente que visualiza la superficie del objeto de estudio.
b. Un subsistema de iluminación formado por un proyector que emite luz estructurada o aleatoria sobre la superficie del objeto de estudio de tal forma que el ángulo de incidencia definido entre el eje óptico de la cámara digital del subsistema de adquisición de imágenes y el eje óptico del proyector, es distinto de cero.
c. Un subsistema de alineación y calibración. Este subsistema permite: i) Desplazar a lo largo de un eje, que denominamos eje de desplazamiento-z, de forma solidaria la cámara y el proyector de franjas pertenecientes respectivamente al subsistema de adquisición de imágenes y de iluminación. ii) Alinear el eje óptico de la cámara del subsistema de adquisición de imágenes con el eje de desplazamiento-z. iii) Alinear el conjunto del dispositivo de forma que el eje óptico de la cámara del subsistema de adquisición de imágenes quede perpendicular a una superficie plana de referencia (desde la cual se miden los desplazamientos fuera de plano).
d. Un subsistema de procesado y control que controla, al menos, el subsistema de adquisición de imágenes para guardar y procesar las imágenes adquiridas, y obtener los parámetros necesarios para la calibración y corrección de los mapas de desplazamientos.
2. Dispositivo según la reivindicación 1, caracterizado por utilizar un subsistema de iluminación formado por un proyector que emite luz estructurada en forma de franjas paralelas con el fin de aplicar la técnica de proyección de franjas para obtener los desplazamientos fuera de plano.
3. Dispositivo según la reivindicación 1, caracterizado por utilizar un subsistema de iluminación formado por un proyector que emite luz con intensidad distribuida espacialmente de forma aleatoria con el fin de aplicar la técnica de "speckle projection" para obtener los desplazamientos fuera de plano.
4. Dispositivo según la reivindicación 1, caracterizado por utilizar la técnica de correlación digital de imágenes 2D para obtener los desplazamientos en el plano, para lo cual la superficie de estudio debe presentar un moteado aleatorio bien sea porque se ha pintado o por la propia naturaleza rugosa que presente.
5. Dispositivo según la reivindicación 1, caracterizado por utilizar un láser para alinear con respecto a la superficie plana de referencia el conjunto del dispositivo, tal que el eje óptico del subsistema de adquisición de imágenes y el eje de desplazamiento- z del subsistema de alineación y calibración estén perpendiculares a dicha superficie de referencia. El láser está fijado a la cámara del subsistema de adquisición de imágenes de tal forma que el haz láser emitido por él queda paralelo al eje óptico de dicha cámara.
6. Dispositivo según la reivindicación 1, caracterizado por utilizar una plataforma deslizante en el subsistema de alineación y calibración que permite desplazar manual o automáticamente y de forma solidaria el subsistema de adquisición de imágenes y el proyector de franjas del subsistema de iluminación en la dirección del eje de desplazamiento-z, y también medir el desplazamiento realizado por dicha plataforma.
7. Dispositivo según la reivindicación 1, caracterizado por utilizar una plataforma inclinable en el subsistema de alineación y calibración que permite rotar el subsistema de adquisición de imágenes manualmente o de forma automatizada en torno a, al menos, dos ejes perpendiculares entre sí, con uno de ellos perpendicular al plano de incidencia definido en el subsistema de iluminación y el otro perpendicular al eje óptico de la cámara del subsistema de adquisición de imágenes, con el fin de alinear paralelamente entre sí dicho eje óptico y el eje de desplazamiento-z de la plataforma deslizante.
8. Dispositivo según la reivindicación 1, caracterizado por utilizar un cabezal inclinable en el subsistema de alineación y calibración que soporta el conjunto del dispositivo y que permite rotarlo manualmente o de forma automatizada en torno a, al menos, dos ejes perpendiculares entre sí con uno de ellos perpendicular al plano de incidencia definido en el subsistema de iluminación y el otro perpendicular al eje de desplazamiento-z de la plataforma deslizante del subsistema de alineación y calibración. Dicho cabezal inclinable permite alinear dicho eje de desplazamiento-z perpendicularmente a una superficie plana de referencia.
9. Dispositivo según las reivindicaciones 1 y 7, en el que el proyector de luz estructurada del subsistema de iluminación es también inclinado por la plataforma inclinable del subsistema de alineación y calibración.
10. Dispositivo según las reivindicaciones 1 y 6, caracterizado por utilizar un
subsistema de procesado y control que también controla de forma automatizada el desplazamiento de la plataforma deslizante.
11. Dispositivo según las reivindicaciones 1 y 7, caracterizado por utilizar un
subsistema de procesado y control que también controla la rotación en torno a los ejes de la plataforma inclinable.
12. Dispositivo según las reivindicaciones 1 y 8, caracterizado por utilizar un subsistema de procesado y control que también controla la rotación en torno a los ejes del cabezal inclinable.
Patentes similares o relacionadas:
Método de medición de una distancia, del 17 de Junio de 2020, de The Chugoku Electric Power Co., Inc: Un método de medición de una distancia que comprende: instalar un miembro de referencia en una superficie de un primer miembro metálico (P1), e instalar un miembro […]
Sensor de dilatación soldable para superficies curvadas, del 25 de Marzo de 2020, de Hottinger Brüel & Kjaer GmbH: Sensor de dilatación soldable con las siguientes características: a. un sensor de dilatación con dos secciones extremas, que están acopladas […]
Disposición de sensor de dilatación-FBG soldable, del 25 de Marzo de 2020, de HOTTINGER BALDWIN MESSTECHNIK GMBH: Disposición de sensor de dilatación-FBG con un soporte de sensor de chapa de acero y al menos un sensor de dilatación-FBG , en la que - el sensor de dilatación-FBG […]
Sensor de presión de fibra óptica que comprende cavidad y red dentro del núcleo, del 25 de Diciembre de 2019, de SAAB AB: Fibra óptica que comprende un núcleo y, de manera opcional, una cubierta , revestimiento o recubrimiento que rodea dicho núcleo, comprendiendo el núcleo […]
Sistemas de instrumentos robóticos que utilizan sensores de fibra óptica, del 9 de Octubre de 2019, de KONINKLIJKE PHILIPS N.V: Un sistema que comprende: un cuerpo de instrumento alargado ; un sensor de fibra óptica acoplado al cuerpo de instrumento alargado y que forma un sensor […]
Galga extensiométrica de fibra óptica compensada en temperatura, del 11 de Septiembre de 2019, de THE HONG KONG POLYTECHNIC UNIVERSITY (100.0%): Una galga extensiométrica de fibra óptica compensada en temperatura para medir deformación de una estructura anfitriona , la galga extensiométrica […]
Procedimiento para la determinación de un desperfecto de un vehículo, del 21 de Junio de 2019, de API International AG: Procedimiento para la determinación de un desperfecto de un vehículo mediante una unidad de detección óptica para la detección tridimensional de una superficie […]
 Método para analizar deformaciones en un objeto laminado y sistema acorde, del 29 de Mayo de 2019, de VESTAS WIND SYSTEMS A/S: Método para analizar un objeto laminado , que comprende:
exponer un área de superficie del objeto laminado a una radiación electromagnética coherente;
detectar […]
Método para analizar deformaciones en un objeto laminado y sistema acorde, del 29 de Mayo de 2019, de VESTAS WIND SYSTEMS A/S: Método para analizar un objeto laminado , que comprende:
exponer un área de superficie del objeto laminado a una radiación electromagnética coherente;
detectar […]