Verificación de corte de estopas para colocar fibras automáticamente.
Un método para controlar la operación de los dispositivos de corte usados para cortar estopas de fibra a la longitud deseada automáticamente para ser usado en una máquina automática de colocación de fibras,
que comprende:
grabar una imagen de al menos una porción de una hilera de estopas colocadas por la máquina; grabar el momento en que cada uno de los dispositivos de corte es hecho actuar para cortar las estopas a la longitud deseada durante la colocación de las estopas;
usar la imagen grabada para detectar si existe una inconsistencia en la colocación de una estopa; y, determinar si un dispositivo de corte es responsable de la inconsistencia detectada correlacionando el momento grabado con la inconsistencia detectada.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08171825.
Solicitante: THE BOEING COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 100 NORTH RIVERSIDE PLAZA CHICAGO, IL 60606-2016 ESTADOS UNIDOS DE AMERICA.
Inventor/es: ENGELBART,ROGER W, Hannebaum,Reed.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B29C70/38 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B29 TRABAJO DE LAS MATERIAS PLASTICAS; TRABAJO DE SUSTANCIAS EN ESTADO PLASTICO EN GENERAL. › B29C CONFORMACIÓN O UNIÓN DE MATERIAS PLÁSTICAS; CONFORMACIÓN DE MATERIALES EN ESTADO PLÁSTICO, NO PREVISTA EN OTRO LUGAR; POSTRATAMIENTO DE PRODUCTOS CONFORMADOS, p. ej. REPARACIÓN (fabricación de preformas B29B 11/00; fabricación de productos estratificados combinando capas previamente no unidas para convertirse en un producto cuyas capas permanecerán unidas B32B 37/00 - B32B 41/00). › B29C 70/00 Conformación de materiales compuestos, es decir, materiales plásticos con refuerzos, cargas o partes preformadas, p. ej. inserciones. › Apilado (lay-up) automático, es decir, utilizando robots, aplicando filamentos según modelos predeterminados.
PDF original: ES-2382131_T3.pdf
Fragmento de la descripción:
Verificación de corte de estopas para colocar fibras automáticamente.
CAMPO TÉCNICO Esta descripción se refiere en general a un equipo para colocar automáticamente estopas de material compuesto sobre una forma, y se refiere más particularmente a un método y a un aparato para determinar si las inconsistencias en la colocación de estopas están relacionadas con la operación de dispositivos de corte automatizados usados para cortar las estopas a la longitud deseada cuando están siendo colocadas.
ANTECEDENTES Un método para usar luz para indicar lugares defectuosos en una estructura de material compuesto es conocido, por ejemplo, por el documento WO 2005/101144A2. Un método para integrar funciones de codificación en máquinas de colocación de material es conocido, por ejemplo, por la patente americana US 2007/0096019A1. Generalmente, partes y estructuras de materiales compuestos tales como las usadas en las industrias automovilística, naval y aeroespacial pueden ser fabricadas usando máquinas automatizadas de aplicación de materiales compuestos. Por ejemplo, máquinas de colocación automática de fibras (AFP) pueden ser usadas para producir partes de materiales compuestos generalmente cilíndricas o tubulares envolviendo bandas de cintas de material compuesto con aberturas relativamente estrechas o "estopas", colimadas en una banda más ancha alrededor de una herramienta de fabricación rotatoria, tal como un mandril. Las máquinas de AFP son operadas típicamente por controladores NC (de control numérico) o CNC (de control numérico por ordenador) que controlan el movimiento de las cabezas de aplicación y las funciones auxiliares, incluyendo la colocación y el corte de estopas de fibras "al aire".
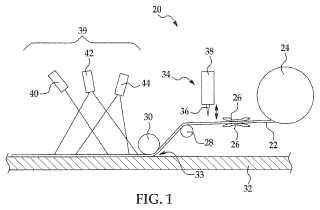
En una aplicación de máquina de AFP típica, se impulsan hacia fuera estopas de fibra de carbono-epoxy desde carretes de almacenamiento o desde nasas de un alojamiento para nasas refrigerado a través de un conjunto de guías. Desde las guías, las estopas entran en un conjunto de dispositivos de corte donde son cortadas a la longitud correcta mediante cuchillas cuando la capa de material, también llamada una pasada de estopa, es dispuesta sobre un sustrato. El sustrato puede comprender una herramienta, un mandril o una o más capas subyacentes de material compuesto que han sido dispuestas y compactadas previamente. Cada estopa tiene una cuchilla de corte dedicada, sin embargo, el número de cuchillas puede variar dependiendo del número de estopas y del ancho de cada estopa. Cuando las estopas emergen del conjunto de dispositivos de corte, pasan por un rodillo de compactación que aplica y comprime las estopas sobre la superficie del sustrato. Se puede aplicar calor a la estopa inmediatamente antes de que sea dispuesta sobre el sustrato para aumentar la adhesividad de la resina. Se mantiene en todo momento la tensión en las estopas para asistir a que sean impulsadas a través de la máquina de AFP.
Cuando se está colocando una banda de estopa es posible que falte una o más estopas en la banda debido a cualquiera de diversas causas. Por ejemplo, a una nasa puede acabársele el material de estopa, o la estopa puede haberse roto sometida a tensión, dejando que el segmento libre sea colocado como un segmento parcial, o puede desprenderse totalmente del sustrato. También, la estopa puede atascarse durante el tránsito a través de la máquina de AFP, impidiendo que sea aplicada al sustrato. También es posible que la cuchilla de corte pueda ser hecha actuar prematuramente, causando que la estopa sea cortada corta. En algunas aplicaciones, las bandas de estopa pueden ser estrechas por diseño, lo que requiere que una o más estopas sean despegadas o cortadas cortas intencionadamente. En otras aplicaciones, una banda de corte puede aumentar su anchura desde una región estrecha a otra ancha, lo que requiere la adición de estopas que hayan sido cortadas previamente y a las que se les ha impedido el desplazamiento. Cuando ocurre un suceso del tipo explicado anteriormente, o si una estopa está mal colocada, resulta importante determinar la causa, de preferencia en tiempo casi real.
En el proceso de inspección por visión como el descrito en el documento WO-A-2005/101144, se han previsto sistemas para detectar las estopas que faltan y/o están mal colocadas. Estos sistemas de inspección pueden basarse en la observación remota de la superficie del sustrato usando una tecnología de visión de máquina que puede incorporar técnicas de análisis de imagen automatizadas para identificar inconsistencias. Los sistemas pueden incluir cámaras para controlar la disposición de las estopas para descubrir posibles rupturas o atascos. Sin embargo, ninguno de estos sistemas anteriores puede ser efectivo determinando rápidamente si las cuchillas de corte están operando apropiadamente, o si las inconsistencias en la colocación de la estopas están relacionadas con la operación de la cuchillas de corte.
De acuerdo con lo anterior, existe una necesidad de un sistema que controle directamente la operación de la cuchilla de corte y correlacione las estopas que faltan y las estopas mal colocadas con la operación de la cuchilla de corte. Las realizaciones de la descripción pretende satisfacer esta necesidad.
SUMARIO Las realizaciones de la descripción proporcionan control directo de la operación de la cuchilla de corte de una manera que permite que un operador determine, casi en tiempo real, si las cuchillas de corte están operando normalmente, y si las inconsistencias en la colocación de las estopas están relacionadas con la operación de las cuchillas de corte. La operación de las cuchillas de corte es controlada continua y directamente para que los malos
funcionamientos puedan ser anunciados inmediatamente a un operador, o ser usados para interrumpir o modificar la operación de la máquina de AFP. Se graban imágenes de las estopas cuando son colocadas sobre la superficie del sustrato. Estas imágenes son correlacionadas a continuación con la operación de las cuchillas de corte para que un operador pueda asociar visualmente con rapidez una inconsistencia en la colocación de las estopas con la operación de una cuchilla de corte responsable de la inconsistencia de la colocación de la estopa.
De acuerdo con la reivindicación 1, se proporciona un método para controlar la operación de los dispositivos de corte usados para cortar automáticamente estopas de fibra a la longitud deseada con una máquina de colocación automática de fibras. El método puede comprender grabar una imagen de al menos una porción de una hilera de estopas colocadas por la máquina; grabar el momento en que cada una de los dispositivos de corte es hecho actuar para cortar una estopa a la longitud deseada durante la colocación de la estopa; usar la imagen grabada para detectar si existen inconsistencias en la colocación de la estopa; y, determinar si un dispositivo de corte es responsable de las inconsistencias detectadas correlacionando el momento que ha sido grabado con las inconsistencias detectadas. La detección de inconsistencias puede incluir medir características en la imagen grabada que puedan representar inconsistencias. Los resultados de la medida de características pueden ser comparados con un conjunto de estándares de referencia para determinar si los resultados revelan inconsistencias. El método puede comprender además clasificar las inconsistencias detectadas, y anunciar un malfuncionamiento de la operación de un dispositivo de corte basándose en la clasificación de las inconsistencias.
Se proporciona un sistema para controlar la operación de los dispositivos de corte usados para cortar estopas en una máquina de colocación de fibras. El sistema puede comprender medios de grabación de imágenes para grabar imágenes de estopas colocadas por la máquina; medios para detectar inconsistencias en la colocación de estopas usando las imágenes grabadas; y, medios para correlacionar inconsistencias con la operación de los dispositivos de corte. El método puede comprender además medios para detectar la actuación de cada uno de los dispositivos de corte y para producir señales de regulación que representen respectivamente los momentos en los que los dispositivos de corte son hechos actuar para cortar las estopas a la longitud deseada. Los medios para grabar imágenes pueden incluir medios para iluminar estopas que han sido colocadas, y al menos una cámara para grabar una serie de imágenes de las estopas a lo largo del tiempo cuando las estopas están siendo colocadas. Los medios de iluminación pueden incluir al menos un láser, y los medios de correlación pueden incluir un ordenador programado que... [Seguir leyendo]
Reivindicaciones:
1. Un método para controlar la operación de los dispositivos de corte usados para cortar estopas de fibra a la longitud deseada automáticamente para ser usado en una máquina automática de colocación de fibras, que 5 comprende:
grabar una imagen de al menos una porción de una hilera de estopas colocadas por la máquina; grabar el momento en que cada uno de los dispositivos de corte es hecho actuar para cortar las estopas a la longitud deseada durante la colocación de las estopas;
usar la imagen grabada para detectar si existe una inconsistencia en la colocación de una estopa; y, determinar si un dispositivo de corte es responsable de la inconsistencia detectada correlacionando el momento grabado con la inconsistencia detectada.
2. El método de la reivindicación 1, en el que usar la imagen incluye correlacionar los momentos grabados con las15 estopas de la hilera.
3. El método de la reivindicación 1 ó 2, en el que usar la imagen incluye características de medida de la imagen grabada que puedan representar una inconsistencia.
4. El método de la reivindicación 3, en el que usar la imagen incluye comparar los resultados de la medida de la característica con un conjunto de estándares de referencia.
5. El método de la reivindicación 1, 2, 3 ó 4, que comprende además:
clasificar las inconsistencias detectadas; y, anunciar un malfuncionamiento en la operación de una cuchilla basándose en la clasificación de las inconsistencias.
6. El método de la reivindicación 1, 2, 3, 4 ó 5, que comprende además:
asociar visualmente cada una de las estopas de la imagen grabada con el estado operativo del dispositivo de corte usado para cortar la estopa a la longitud deseada.
7. El método de la reivindicación 1, 2, 3, 4, 5 ó 6, que comprende además:
presentar visualmente la imagen grabada; y, presentar visualmente el estado operativo de cada uno de los dispositivos de corte adyacentes a las estopas respectivas de la imagen presentada.
Patentes similares o relacionadas:
Sistema de compactación por calentamiento por inducción y método de compactación, del 22 de Julio de 2020, de Northrop Grumman Innovation Systems, Inc: Un sistema de compactación por calentamiento por inducción, comprendiendo el sistema: un miembro (110, 120, 450, […]
Método para fabricar lámina de fibras de refuerzo, del 15 de Julio de 2020, de TORAY INDUSTRIES, INC.: Un aparato de fabricación de lámina de fibras de refuerzo configurado para colocar un haz de fibras de refuerzo sobre una plataforma , comprendiendo el aparato […]
Sistema de calentador para máquina de colocación de fibras, del 8 de Julio de 2020, de THE BOEING COMPANY: Maquina de colocacion de fibras automatica que comprende: una cabeza que comprende un rodillo compactador ; un calentador montado en la parte […]
Procedimiento de depósito de un material intermedio que permite asegurar la cohesión de este último y material intermedio, del 1 de Julio de 2020, de HEXCEL REINFORCEMENTS: Procedimiento de depósito en continuo sobre una superficie de depósito de un material intermedio constituido por una capa unidireccional de fibras […]
Aparato y métodos para formar rigidizadores y estructuras de refuerzo de material compuesto, del 24 de Junio de 2020, de Northrop Grumman Innovation Systems, Inc: Un aparato para formar miembros estructurales compuestos alargados que comprende: una base ; al menos un mandril (106, 206, […]
Sistema de aplicación de materiales compuestos con cabezales de disposición intercambiables, del 10 de Junio de 2020, de Fives Machining Systems, Inc: Un sistema de laminación de materiales compuestos que comprende un posicionador de seis ejes y múltiples cabezales extraíbles para aplicar […]
Sustrato de fibra reforzada en forma de lámina, preforma, artículo moldeado de plástico reforzado con fibra y método de producción de un producto moldeado de resina reforzada con fibra, del 6 de Mayo de 2020, de TORAY INDUSTRIES, INC.: Un material base de fibra de refuerzo en forma de lámina (1, 1a, 1b, 1c, 1d) utilizado para producir un producto moldeado de resina reforzada […]
Sistema para fabricar piezas compuestas de manera aditiva, del 29 de Abril de 2020, de THE BOEING COMPANY: Sistema para fabricar de manera aditiva una pieza compuesta , comprendiendo el sistema : un conjunto de suministro , […]