TIMÓN AUXILIAR EN UN PROPULSOR AZIMUTAL ELÉCTRICO PARA BARCOS DE NAVEGACIÓN RÁPIDA Y PROCEDIMIENTO DE FUNCIONAMIENTO PARA EL TIMÓN AUXILIAR.
Procedimiento de funcionamiento para un timón auxiliar en un propulsor azimutal eléctrico,
dispuesto de manera giratoria bajo la popa de un barco de navegación rápida y que sirve como timón principal para el barco, presentando el propulsor azimutal eléctrico un motor eléctrico en una carcasa, que está dispuesta en el extremo de un árbol de soporte, que está unido de manera giratoria con la popa del barco y estando dispuesto el timón (6, 10) auxiliar bajo la carcasa del motor eléctrico, caracterizado porque el movimiento del timón auxiliar se controla en función de la velocidad del barco, ajustándose la velocidad de regulación y/o el ángulo de regulación máximo del timón (6, 10) auxiliar en función de la velocidad del barco, bloqueándose el timón (6, 10) auxiliar a velocidades del barco reducidas, por ejemplo cuando el barco navega en modo portuario (ángulo de rotación del propulsor azimutal de 360 grados), y asumiendo el timón (6, 10) auxiliar a velocidades del barco elevadas por sí solo el control del barco, y bloqueándose el propulsor azimutal
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E03020704.
Solicitante: SIEMENS AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: WITTELSBACHERPLATZ 2 80333 MUNCHEN ALEMANIA.
Inventor/es: RZADKI, WOLFGANG, SCHULZE HORN, HANNES.
Fecha de Publicación: .
Fecha Solicitud PCT: 11 de Septiembre de 2003.
Clasificación Internacional de Patentes:
- B63H25/38 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63H PROPULSION O GOBIERNO MARINO (propulsión de vehículos de colchón de aire B60V 1/14; especialmente adaptados para submarinos que no sean de propulsión nuclear, B63G; especialmente adaptados para torpedos F42B 19/00). › B63H 25/00 Gobierno; Disminución de marcha utilizando medios distintos a los elementos propulsores (que emplean unidades de propulsión fueraborda instaladas de forma amovible B63H 20/00 ); Anclaje o amarre dinámico, es decir, posicionamiento de los buques por medio de elementos propulsores auxiliares o principales. › Timones.
- B63H25/42 B63H 25/00 […] › Gobierno o anclaje dinámico por elementos propulsores (con la ayuda de chorros B63H 25/46 ); Gobierno o anclaje dinámico por hélices utilizadas únicamente con este fin; Gobierno o anclaje dinámico por timones que llevan las hélices.
- B63H5/125 B63H […] › B63H 5/00 Instalaciones a bordo de buques de elementos propulsores que actúan directamente sobre el agua. › con montaje móvil con respecto al casco, p.ej. ajustable en dirección (montaje móvil cuyo único fin es el gobierno del timón B63H 25/42).
Clasificación PCT:
- B63H25/38 B63H 25/00 […] › Timones.
- B63H25/42 B63H 25/00 […] › Gobierno o anclaje dinámico por elementos propulsores (con la ayuda de chorros B63H 25/46 ); Gobierno o anclaje dinámico por hélices utilizadas únicamente con este fin; Gobierno o anclaje dinámico por timones que llevan las hélices.
- B63H5/125 B63H 5/00 […] › con montaje móvil con respecto al casco, p.ej. ajustable en dirección (montaje móvil cuyo único fin es el gobierno del timón B63H 25/42).
Clasificación antigua:
- B63H25/38 B63H 25/00 […] › Timones.
- B63H25/42 B63H 25/00 […] › Gobierno o anclaje dinámico por elementos propulsores (con la ayuda de chorros B63H 25/46 ); Gobierno o anclaje dinámico por hélices utilizadas únicamente con este fin; Gobierno o anclaje dinámico por timones que llevan las hélices.
- B63H5/125 B63H 5/00 […] › con montaje móvil con respecto al casco, p.ej. ajustable en dirección (montaje móvil cuyo único fin es el gobierno del timón B63H 25/42).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2373711_T3.pdf
Fragmento de la descripción:
Timón auxiliar en un propulsor azimutal eléctrico para barcos de navegación rápida y procedimiento de funcionamiento para el timón auxiliar La invención se refiere a un timón auxiliar en un propulsor azimutal eléctrico, dispuesto de manera giratoria bajo la popa de un barco de navegación rápida y que sirve como timón principal para el barco, presentando el propulsor azimutal eléctrico un motor eléctrico en una carcasa, que está dispuesta en el extremo de un árbol de soporte, que está unido de manera giratoria con la popa del barco, y a un procedimiento de funcionamiento para el timón auxiliar así como a un uso particular del timón auxiliar.
Por el documento EP 0 901 449 B1 se conoce un timón auxiliar para un propulsor azimutal eléctrico, que está dispuesto en el borde posterior del árbol de soporte para la carcasa del motor eléctrico. En el caso de este timón auxiliar conocido es desventajoso que se encuentre en la zona de flujo con turbulencias del árbol de soporte para la carcasa del motor eléctrico y aún en parte en el flujo con turbulencias de la popa del barco. Por los motivos anteriores se ve perjudicado en su funcionamiento y desde el punto de vista mecánico también tiene que configurarse de manera especialmente estable. Además su colocación y su mecanismo de regulación son complejos. El movimiento del timón auxiliar conocido se produce de manera hidráulica. De manera global se produce una realización compleja y difícil con un funcionamiento perjudicado. Configuraciones adicionales del timón auxiliar se conocen por el documento EP 1 270 402 A1. Sin embargo, no se da a conocer un procedimiento de funcionamiento para estas configuraciones del timón auxiliar que permita un control optimizado del barco en condiciones de funcionamiento diferentes. Este documento se considera relevante para el artículo 54 (3) del CPE.
El documento WO 89/05262 se considera el estado de la técnica más próximo.
El objetivo de la invención es indicar un procedimiento de funcionamiento para timones auxiliares en un propulsor azimutal eléctrico, que de manera particularmente ventajosa pueda ajustarse a las diferentes necesidades con respecto a su función a diferentes velocidades del barco.
En el marco de la invención se prevé un procedimiento de funcionamiento para el timón auxiliar que controla los movimientos del timón auxiliar en función de la velocidad del barco. En este caso está previsto que la velocidad de regulación y/o el ángulo de regulación máximo se ajuste en función de los intervalos de velocidad. Los intervalos de velocidad son por ejemplo en primer lugar el intervalo de una navegación lenta, en segundo lugar el intervalo de navegación media y en último lugar el intervalo de navegación rápida. En estos intervalos el timón auxiliar se utiliza de manera diferente según su función específica para el funcionamiento.
El timón auxiliar es particularmente importante en el caso de barcos para la Armada, que por ejemplo presentan chorros de agua en la zona media del barco, con los que puede controlarse e impulsarse el barco incluso con los propulsores azimutales parados. Con los propulsores azimutales parados, los timones auxiliares se hacen funcionar de manera independiente y pueden utilizarse como timones de desplazamiento rápido y como timones de apoyo para el control mediante los chorros de agua. Su función como timones de apoyo la ejercen en caso de fallar los dispositivos de rotación del propulsor azimutal. Para ello presentan de manera ventajosa conductores eléctricos separados de los motores del propulsor azimutal de modo que se obtiene un sistema de timón redundante para un barco de navegación rápida. Apoyan el control mediante los chorros de agua, el cual se alcanza por un lado mediante diferentes fuerzas de empuje a ambos lados del barco, pero también mediante aletas de control detrás de los chorros de agua. Como los chorros de agua se encuentran en gran parte en la zona media del barco, su acción de control es relativamente reducida, de modo que los timones de apoyo son de gran importancia.
La invención se explica con más detalle a modo de ejemplo mediante dibujos, de los que pueden deducirse detalles adicionales, también esenciales para la invención, al igual que de las reivindicaciones dependientes.
De manera detallada muestran:
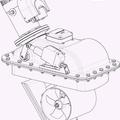
la figura 1 un propulsor azimutal eléctrico con timón auxiliar, presentando el propulsor azimutal un propulsor de tracción y uno de empuje, la figura 2 un corte parcial esquemático a través de un propulsor azimutal eléctrico, con un timón auxiliar dispuesto en el extremo posterior y la figura 3 la configuración esencial de las unidades de control para el procedimiento de funcionamiento.
En la figura 1, 1 designa el lado inferior de la popa del barco y 3 el propulsor de tracción y 4 el propulsor de empuje del propulsor 7 azimutal eléctrico. Con 5 se designa la unidad base, dispuesta de manera montada, del timón 6 auxiliar, que está suspendido en una parte 2 fija. Esta realización del timón auxiliar es relativamente poco sensible a los cambios de la corriente del propulsor y desde el punto de vista mecánico tiene una alta capacidad de carga.
En la figura 2, que muestra un propulsor azimutal eléctrico con un propulsor 9 de tracción, el timón 10 auxiliar está configurado como timón de palas previamente balanceado. Indicados de manera esquemática en la carcasa del propulsor 8 azimutal eléctrico están dispuestos unos devanados eléctricos, que por ejemplo se enfrían a través de la pared externa de la carcasa 8. Así se obtiene una forma especialmente delgada de la carcasa 8 del propulsor azimutal eléctrico con una turbulencia reducida del agua que fluye por el mismo. La acción del timón auxiliar es buena de manera correspondiente.
El timón 10 auxiliar se mueve por ejemplo a través de un árbol con una rueda 12 helicoidal y un motor eléctrico con piñones 11. Estas unidades pueden disponerse de manera ventajosa en el extremo libre en la parte posterior en la carcasa 8 del propulsor azimutal eléctrico. Entre el timón 10 auxiliar y el extremo libre de la carcasa 8 se encuentra una aleta 13, conformada en el extremo de la carcasa y que ejerce una acción de estabilización en el caso de una navegación rápida en línea recta.
En la figura 3, 13 designa la unidad de control del barco, que presenta transmisores de valores de referencia para las posiciones del timón y aletas, por ejemplo las aletas 21 al final de un chorro de agua. Los transmisores de valores de referencia están dotados de rampas y funcionan por ejemplo en función de la velocidad. La unidad de control corresponde ventajosamente al puesto habitual de la automatización de barcos y presenta controladores programables, por ejemplo del tipo SIMATIC S7, de la empresa Siemens. En está técnica también se realiza de manera ventajosa el sistema 15 de bloqueo para los componentes individuales del sistema de timón. El sistema 15 de bloqueo evita de manera fiable que la unidad 18 de control para el timón auxiliar pueda realizar un movimiento de rotación indicado mediante la flecha doble 20, cuando la unidad de control para el control azimutal controla un movimiento de rotación indicado mediante la flecha doble 19 para el propulsor azimutal completo.
En caso de que el barco de navegación rápida, por ejemplo en la zona media del barco, presente chorros de agua, tal como está previsto para una nueva generación de barcos para la Armada, el sistema de automatización presenta aún una unidad 16 de control para las aletas de control del o de los chorros de agua. En este caso las aletas 21 de control se controlan a través de una unidad 22, por ejemplo cuando ha fallado el propulsor azimutal eléctrico. Se entiende que las unidades de control mostradas están realizadas de manera redundante, de modo que, por ejemplo en el caso de un impacto contra un lado del barco en un barco para la Armada, la totalidad del barco aún pueda seguir controlándose e impulsándose.
El procedimiento de funcionamiento para un barco de navegación rápida, en particular para un barco rápido para la Armada, aunque también para barcos civiles, por ejemplo para transbordadores rápidos con impulsores por chorro de agua adicionales, se produce de la siguiente manera:
La dirección del barco se controla por tres sistemas de timón diferentes. Éstos son por un lado el sistema de timón para la rotación del al menos un propulsor azimutal eléctrico, por otro lado el sistema de timón para la rotación del timón auxiliar y además el sistema de timón para las... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de funcionamiento para un timón auxiliar en un propulsor azimutal eléctrico, dispuesto de manera giratoria bajo la popa de un barco de navegación rápida y que sirve como timón principal para el barco, presentando el propulsor azimutal eléctrico un motor eléctrico en una carcasa, que está dispuesta en el extremo de un árbol de soporte, que está unido de manera giratoria con la popa del barco y estando dispuesto el timón (6, 10) auxiliar bajo la carcasa del motor eléctrico, caracterizado porque el movimiento del timón auxiliar se controla en función de la velocidad del barco, ajustándose la velocidad de regulación y/o el ángulo de regulación máximo del timón (6, 10) auxiliar en función de la velocidad del barco, bloqueándose el timón (6, 10) auxiliar a velocidades del barco reducidas, por ejemplo cuando el barco navega en modo portuario (ángulo de rotación del propulsor azimutal de 360 grados) , y asumiendo el timón (6, 10) auxiliar a velocidades del barco elevadas por sí solo el control del barco, y bloqueándose el propulsor azimutal.
2. Procedimiento de funcionamiento según la reivindicación 1, caracterizado porque el timón (6, 10) auxiliar se mueve, en el intervalo de velocidad de desplazamiento medio o en el caso de maniobras rápidas también 15 en otros intervalos de velocidad, según la velocidad de rotación del árbol.
3. Procedimiento de funcionamiento según la reivindicación 1 y 2, caracterizado porque la velocidad de rotación del timón auxiliar se controla a través de rampas de velocidad de rotación, almacenadas en una unidad (14) de control del barco.
4. Procedimiento de funcionamiento según una o varias de las reivindicaciones 1 a 3, caracterizado porque el
timón (6, 10) auxiliar en caso de existir unidades de impulso adicionales en el barco, por ejemplo chorros de agua en la zona media del barco, se hace funcionar según unidades (21) de control en los chorros de agua.
5. Procedimiento de funcionamiento según una o varias de las reivindicaciones 1 a 4, caracterizado porque el timón (6, 10) auxiliar está configurado de manera que puede hacerse funcionar independientemente de la función del propulsor azimutal eléctrico.
6. Procedimiento de funcionamiento según una o varias de las reivindicaciones anteriores, caracterizado porque, en el caso de barcos para la Armada, en particular en el caso de barcos con un impulso por propulsor azimutal-chorro de agua combinado, se utiliza para un timón de desplazamiento rápido.
Patentes similares o relacionadas:
Sistema de suministro de energía de una embarcación flotante, del 17 de Junio de 2020, de Siemens Energy AS: Un sistema de suministro de energía de una embarcación flotante, en particular, de una embarcación de posicionamiento dinámico en mar abierto, que comprende: - al menos […]
Dispositivo flotante generador de energía eólica, del 11 de Septiembre de 2019, de University Of Ulsan Foundation For Industry Cooperation: Un dispositivo flotante generador de energía eólica que comprende: un cuerpo principal flotante que tiene flotabilidad, de forma que flote sobre el mar, y tiene una […]
Procedimiento para el atraque operado a motor, del 22 de Mayo de 2019, de Kuhn, Andreas: Procedimiento para el atraque operado a motor con un barco , en particular un yate, en un punto de atraque en una zona de atraque, donde en una etapa de elaboración […]
Vehículo mejorado para su uso en agua, en particular en el mar, del 3 de Abril de 2019, de Crazy Dolphin S.r.l: Un vehículo para su uso en agua por un usuario, que comprende: • una tabla flotante , • un componente de cola , acoplado a dicha placa , […]
Propulsión azimutal modular, del 9 de Enero de 2019, de ROLLS-ROYCE MARINE AS: Un propulsor azimutal para propulsar una embarcación, que tiene una carcasa de propulsor alrededor de la que fluye agua, y que comprende: - […]
 Propulsor retráctil, del 21 de Noviembre de 2018, de LEWMAR LIMITED: Un conjunto de propulsor para una embarcación marina, que comprende:
una unidad de hélice ,
un motor ,
un eje de accionamiento que une el motor […]
Propulsor retráctil, del 21 de Noviembre de 2018, de LEWMAR LIMITED: Un conjunto de propulsor para una embarcación marina, que comprende:
una unidad de hélice ,
un motor ,
un eje de accionamiento que une el motor […]
PROPULSOR PORTÁTIL DE MANIOBRA, del 24 de Mayo de 2018, de RESINO BODAS, Santiago: El dispositivo se concreta en una hélice de maniobra, accionada por un motor eléctrico, de 12 o 24 voltios que se lleva en la embarcación a modo […]
SISTEMA DE RECUPERACIÓN DE ENERGÍA CINÉTICA EN UN BARCO, del 12 de Abril de 2018, de GARCIA LAGE, Gerardo: La presente Invención se reitere a un método y un sistema de recuperación de energía cinética en un barco que comprende; un conducta , practicado en el […]