Sistema de estabilización automático antibalanceo para una embarcación.
Un sistema automático de antibalanceo para la estabilización del balanceo de una embarcación anclada,
quecomprende:
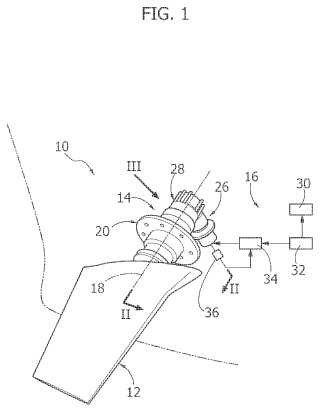
- una aleta estabilizadora (12) que puede girar alrededor de un eje (18), estando configurada la aletaestabilizadora(12) para estar montada en una dirección transversal con respecto al casco de la embarcación yteniendo un perfil hidrodinámico que, en uso, se ve afectado por el flujo de agua en movimiento relativo conrespecto al casco para generar una fuerza de elevación hidrodinámica;
- un conjunto de actuador (14), diseñado para gobernar la rotación de dicha aleta estabilizadora (12) alrededorde dicho eje (18); y
- un sistema de regulación (16) diseñado para gobernar dicho conjunto de actuador (14) como una función deseñales que indica el balanceo de la embarcación, comprendiendo dicho sistema de regulación (16) un mediode sensor (30), diseñado para suministrar una señal que indica el balanceo de la embarcación;
caracterizado porque dicho conjunto de actuador (14) comprende un motor eléctrico (26) conectado a dicha aletaestabilizadora (12) a través de un engranaje de reducción (28) y porque dicho sistema de regulación está dispuestopara controlar la posición angular de la aleta estabilizadora (12) mediante un codificador (36) asociado a dichomotor eléctrico (26) y comprende:
- una unidad (32) de regulación del microprocesador, diseñada para procesar los datos sobre el balanceo de laembarcación suministrados por dicho medio de sensor (30); y
- una unidad de accionamiento (34) para gobernar dicho motor eléctrico (16).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09171591.
Solicitante: CMC MARINE S.R.L.
Nacionalidad solicitante: Italia.
Dirección: VIA S. MICHELE DEL CARSO, 10 22100 COMO ITALIA.
Inventor/es: Cappiello,Alessandro.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63B39/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › B63B 39/00 Equipo para reducir cabeceo, balanceo, o movimientos similares indeseados de embarcaciones; Aparatos para indicar la actitud de una embarcación. › que reducen los movimientos del buque por efecto de alerones que actúan sobre el agua ambiente (estructura de quillas de balanceo B63B 3/44).
PDF original: ES-2384363_T3.pdf
Fragmento de la descripción:
Sistema de estabilización automático antibalanceo para una embarcación La presente invención se refiere a un sistema automático antibalanceo para la estabilización del balanceo de una embarcación, comprendiendo una aleta estabilizadora que puede girar alrededor de un eje, un medio de sensor para detectar el movimiento de balanceo de la embarcación, y un dispositivo de control para gobernar la rotación de dicha aleta alrededor de dicho eje como una función de señales suministradas por dicho medio de sensor.
Las aletas estabilizadoras tienen perfiles básicamente hidrodinámicos (similares a los perfiles rododinámicos) que se montan en una dirección transversal con respecto al casco con el fin de reducir el movimiento transversal de balanceo (rotaciones alrededor del eje longitudinal del casco) producido por la acción de las olas. El perfil hidrodinámico afectado por el flujo de agua en movimiento relativo con respecto al casco genera una fuerza de elevación hidrodinámica que varía, entre otras cosas, como una función del ángulo de incidencia del perfil. La aleta estabilizadora está asociada a un dispositivo de control que varía el ángulo de incidencia del perfil hidrodinámico como una función de señales que indican el balanceo de la embarcación.
En soluciones tradicionales, la aleta estabilizadora está asociada a un actuador mecánico que tiene un eje de rotación cuyo extremo inferior sobresale del casco y está conectado a la aleta estabilizadora. La parte superior del eje del actuador mecánico está fijada a un balancín al que están conectados mecánicamente dos cilindros hidráulicos. El movimiento lineal de los cilindros hidráulicos se convierte en un movimiento de rotación del eje del actuador mecánico mediante el balancín, que también tiene la función de amplificador del par de torsión.
Un sistema típico de estabilización antibalanceo de un tipo conocido se caracteriza por los siguientes parámetros operativos:
- movimiento angular de la aleta estabilizadora con respecto a su posición central: +/- 30°; -velocidad de conducción: entre 22°/s hasta un máxim o de 60°/s;
- conducción con un par de torsión elevado y baja potencia;
- velocidad de rotación máxima: 6-8g/1’.
El movimiento de los cilindros hidráulicos se garantiza mediante un sistema hidráulico a bordo controlado por una válvula direccional proporcional. La válvula proporcional recibe una señal de tensión de +/-10 V procesada por un sistema de control electrónico.
En las soluciones conocidas, el sistema de control electrónico comprende un panel de control que contiene un regulador de tipo PLC. El sistema de control electrónico está asociado a un sistema de sensores para detectar movimientos de balanceo, que comprende un clinómetro que mide el ángulo de balanceo y un giroscopio que mide la velocidad del balanceo.
El regulador electrónico procesa la señal suministrada por los sensores y genera una señal de tensión que determina la abertura de la válvula proporcional. El flujo de aceite que atraviesa la válvula proporcional dirige el avance lineal de los cilindros y, por lo tanto, la rotación del balancín. Le sigue una rotación del eje del actuador mecánico y, por lo tanto, de la aleta estabilizadora. En correspondencia con el supuesto nuevo ángulo de incidencia hay un nuevo valor de la fuerza de elevación hidrodinámica y, por lo tanto, del momento de rectificación generado sobre la embarcación. Dicho momento de rectificación tiende a compensar el momento de desestabilización generado por el impacto de las olas sobre la embarcación.
El rendimiento de todo el sistema de estabilización se ve notablemente afectado por la respuesta dinámica de los tres siguientes subconjuntos:
- actuador mecánico y aleta estabilizadora;
- sistema de control hidráulico;
- sistema de regulación electrónico.
La respuesta dinámica del sistema de regulación electrónico es definitivamente mejor que el rendimiento requerido. Asimismo, el actuador mecánico utilizado puede arrojar buenos resultados en términos de respuesta dinámica. El aspecto crítico del sistema es representado por el comportamiento dinámico del sistema hidráulico.
El diseño y la construcción del sistema de control hidráulico están sujetos a numerosas limitaciones, entre ellas:
- la necesidad de utilizar elementos oleodinámicos estándares disponibles en el mercado;
- pérdidas de carga generadas por el sistema de tubos y dentro de la válvula de regulación proporcional;
- el ruido del sistema, que limita la presión de trabajo a valores no superiores a 120-135 bares;
- baja eficiencia del sistema oleodinámico (la eficiencia entre la potencia instalada del motor y el eje del actuador mecánico es inferior al 50%) ;
- la necesidad de proporcionar un sistema de refrigeración para disipar el calor generado por las pérdidas de eficiencia; y
- el peso y la complejidad del sistema oleodinámico, y la dificultad de instalación y de gestión.
Las limitaciones anteriores afectan y perjudican la respuesta dinámica del sistema de control hidráulico y, por consiguiente, todo el sistema de estabilización.
La mayoría de los sistemas de estabilización utilizados actualmente conciben la opción de estabilización en anclaje, esto es, con la embarcación parada. En estas condiciones, dado que la velocidad del flujo que afecta al perfil hidrodinámico es prácticamente cero, cesa el efecto amplificador de la fuerza de elevación hidrodinámica, y el modo de control tiene meramente una naturaleza impulsora. A menudo, los movimientos de estabilización en anclaje se producen a una frecuencia elevada, por lo que es necesario tener un sistema de actuación disponible con un rango dinámico alto. Esto requiere una potencia disponible superior a la utilizada en navegación.
Para lograr una buena estabilización en anclaje, es indispensable poder girar la aleta estabilizadora a una alta velocidad, en el orden de 45-60°/s. Para obtener est os niveles de rendimiento, el sistema de control hidráulico debe funcionar a alta potencia y, en estas condiciones, existen altos niveles de disipación. Se estima que la eficiencia de la transmisión hidráulica en estas condiciones operativas es del 30-35%. En dichas condiciones, también las cargas dinámicas a las que está sometido el actuador mecánico son altas y esto conlleva un sobredimensionamiento de la mecánica y, por lo tanto, un aumento de la inercia del sistema actuador mecánico. Esto perjudica notablemente la respuesta dinámica de todo el sistema, imposibilitando en ocasiones el uso de dicho sistema para la función de estabilización en anclaje.
El documento US-A-4926778 divulga una embarcación de deslizamiento de alta velocidad que incluye un sistema de estabilización de la cabezada que cuenta con planos aerodinámicos de la cabezada variables controlados por un sistema de control.
El documento US-A-3371642 divulga un dispositivo de control de compensación para embarcaciones que incluye un par de placas de extensión hacia atrás sobre la popa de la nave, que forma extensiones en la superficie inferior del mismo.
El dispositivo US-A-3020869 divulga un sistema de estabilización antibalanceo para buques marinos que incluye una aleta estabilizadora antibalanceo propulsada por un motor hidráulico conectado a una bomba hidráulica mediante líneas hidráulicas.
El dispositivo GB 999 306 divulga un sistema de estabilización antibalanceo para buques marinos que incluye una aleta estabilizadora antibalanceo propulsada por un motor eléctrico.
Más concretamente, la presente invención se refiere a un sistema antibalanceo automático para la estabilización del balanceo de una embarcación de acuerdo con el preámbulo de la reivindicación 1, que se conoce, por ejemplo, del documento EP 1 577 210 A1.
El objeto de la presente invención es proporcionar un sistema antibalanceo automático para la estabilización del balanceo de una embarcación que permitirá resolver los problemas anteriores.
De acuerdo con la presente invención, este objeto se obtiene mediante el sistema antibalanceo automático de acuerdo con la reivindicación 1.
El sistema de regulación electrónico del sistema de acuerdo con la presente invención es más sencillo y, al mismo tiempo, más flexible y potente que los sistemas electrónicos utilizados para el control de los sistemas oleodinámicos.
El sistema de control electrónico asociado a un motor eléctrico... [Seguir leyendo]
Reivindicaciones:
1. Un sistema automático de antibalanceo para la estabilización del balanceo de una embarcación anclada, que comprende:
- una aleta estabilizadora (12) que puede girar alrededor de un eje (18) , estando configurada la aleta
estabilizadora (12) para estar montada en una dirección transversal con respecto al casco de la embarcación y teniendo un perfil hidrodinámico que, en uso, se ve afectado por el flujo de agua en movimiento relativo con respecto al casco para generar una fuerza de elevación hidrodinámica;
- un conjunto de actuador (14) , diseñado para gobernar la rotación de dicha aleta estabilizadora (12) alrededor de dicho eje (18) ; y
- un sistema de regulación (16) diseñado para gobernar dicho conjunto de actuador (14) como una función de señales que indica el balanceo de la embarcación, comprendiendo dicho sistema de regulación (16) un medio de sensor (30) , diseñado para suministrar una señal que indica el balanceo de la embarcación;
caracterizado porque dicho conjunto de actuador (14) comprende un motor eléctrico (26) conectado a dicha aleta estabilizadora (12) a través de un engranaje de reducción (28) y porque dicho sistema de regulación está dispuesto para controlar la posición angular de la aleta estabilizadora (12) mediante un codificador (36) asociado a dicho motor eléctrico (26) y comprende:
- una unidad (32) de regulación del microprocesador, diseñada para procesar los datos sobre el balanceo de la 20 embarcación suministrados por dicho medio de sensor (30) ; y
- una unidad de accionamiento (34) para gobernar dicho motor eléctrico (16) .
2. El sistema de acuerdo con la reivindicación 1, caracterizado porque el sistema de regulación (16) está
dispuesto para controlar uno o más de los siguientes parámetros operativos del motor eléctrico (26) : potencia, par 25 de torsión, velocidad, posición, entrada de alimentación eléctrica, carga.
3. El sistema de acuerdo con la reivindicación 1, caracterizado porque dicho motor eléctrico (26) es un motor de corriente continua de imán permanente.
Patentes similares o relacionadas:
Buque para operar en una masa de agua, que comprende un ala portante de popa para generar una fuerza de empuje y un medio de ajuste para ajustar un ángulo de incidencia del ala portante de popa, del 15 de Julio de 2020, de Van Oossanen & Associates B.V: Buque para operar en una masa de agua que comprende: - un casco , diseñado para la operación de no planeo en la masa de agua durante la operación y que […]
Casco de barco y barco que incluye un casco de este tipo, del 15 de Enero de 2020, de Lade AS: Casco de barco, en el que una parte del casco de barco está por encima de su línea de flotación, en el que el casco por encima de la línea de flotación está […]
Dispositivo flotante generador de energía eólica, del 11 de Septiembre de 2019, de University Of Ulsan Foundation For Industry Cooperation: Un dispositivo flotante generador de energía eólica que comprende: un cuerpo principal flotante que tiene flotabilidad, de forma que flote sobre el mar, y tiene una […]
 Sistema de estabilización de balanceo activo para amortiguar el movimiento de un barco, del 26 de Junio de 2019, de QUANTUM CONTROLS B.V.: Un sistema para amortiguar activamente el movimiento de un barco, que comprende al menos
- un primer elemento (4a, 4b) de estabilización […]
Sistema de estabilización de balanceo activo para amortiguar el movimiento de un barco, del 26 de Junio de 2019, de QUANTUM CONTROLS B.V.: Un sistema para amortiguar activamente el movimiento de un barco, que comprende al menos
- un primer elemento (4a, 4b) de estabilización […]
Vehículo acuático, en particular remolcador, del 8 de Mayo de 2019, de VOITH PATENT GMBH: Vehículo acuático , en particular remolcador con un casco de buque y una aleta dispuesta en la zona de popa y que se extiende en la dirección longitudinal […]
Embarcación que comprende un plano de popa orientado para proporcionar un componente dirigido hacia adelante de fuerza de elevación, del 7 de Mayo de 2019, de Van Oossanen & Associates B.V: Embarcación para operar en un cuerpo de agua que comprende: un casco no plano que tiene una línea de flotación y una dirección longitudinal con […]
Barco con placa regulable en la proa, del 3 de Mayo de 2019, de Wobben Properties GmbH: Barco con al menos un rotor de navegación , en donde el barco presenta un castillo de proa , que presenta una placa ajustable en altura […]
 Planta de generación de energía eólica marina flotante, del 29 de Marzo de 2019, de Toda Corporation: Planta de generación de energía eólica marina flotante que incluye un cuerpo flotante , un cable de amarre , una torre y un molino eólico […]
Planta de generación de energía eólica marina flotante, del 29 de Marzo de 2019, de Toda Corporation: Planta de generación de energía eólica marina flotante que incluye un cuerpo flotante , un cable de amarre , una torre y un molino eólico […]