Sistema de engatillado por rodillo.
Sistema de engatillado que comprende una cuna (4) sobre la que sedisponen unas chapas metálicas (30,
31), uniéndose dichas chapasmetálicas (30, 31) entre sí mediante el doblado de una pestaña (30'') comprendida por la primera chapa metálica (30). Dicho sistema comprende además unos rodillos (21, 22) que se desplazan en unadirección de doblado (A) para doblar dicha pestaña (30''), mediante un dispositivo de engatillado. Dicho dispositivo comprende unúnico brazo de robot (1) que tiene una herramienta de engatillado(2) en uno de sus extremos, comprendiendo dicha herramienta de engatillado (2) los rodillos (21, 22) y una plataforma (7). Dichosrodillos (21, 22) pueden desplazarse linealmente de manera independiente con respecto a dicha plataforma (7) en una dirección dedesplazamiento (B) perpendicular a la dirección de doblado (A), mediante un primer actuador (8) y un segundo actuador (9) respectivamente.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/ES2007/070005.
Solicitante: MB SISTEMAS, S.COOP.
Nacionalidad solicitante: España.
Inventor/es: CASAS HOYOS,SANTOS TOMAS, ALONSO SARMIENTO,SERGIO, PIÑAN LLAMAS,David.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B21D39/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B21 TRABAJO MECANICO DE LOS METALES SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DEL METAL POR PUNZONADO. › B21D TRABAJO MECANICO O TRATAMIENTO DE CHAPAS, TUBOS, BARRAS O PERFILES METALICOS SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DE METALES POR PUNZONADO (trabajo mecánico o tratamiento de alambre B21F). › B21D 39/00 Utilización de procedimientos que permitan el ensamblaje de objetos o de partes de objetos, p. ej. revestimiento con chapas, que no sea por chapado (remachado B21J; ensamblado de elementos por forjado o prensado al objeto de que formen una sola pieza B21K 25/00 ); Dispositivos de mandrinaje de tubos. › de chapas por doblado, p. ej. conectando los bordes de una chapa para formar un cilindro.
PDF original: ES-2381587_T3.pdf
Fragmento de la descripción:
Sistema de engatillado por rodillo.
SECTOR DE LA TÉCNICA
La presente invención se relaciona con sistemas de engatillado, y más concretamente con sistemas de engatillado por rodillo.
ESTADO ANTERIOR DE LA TÉCNICA
Son conocidos sistemas de engatillado empleados para unir una primera chapa metálica y una segunda chapa metálica mediante el doblado de una pestaña de una de ellas. En algunos sistemas de engatillado, dicho doblado se realiza mediante al menos un rodillo, desplazándose dicho rodillo a lo largo del contorno de dicha pestaña, mediante un dispositivo de engatillado.
La primera chapa metálica se dispone sobre una mesa de trabajo o cuna, disponiéndose la segunda chapa metálica sobre dicha primera chapa metálica. La primera chapa metálica comprende una pestaña a lo largo de todo su contorno, ejerciendo el rodillo una presión sobre dicha pestaña a lo largo de dicho contorno, de tal manera que dicha pestaña se dobla, disponiéndose sobre dicha segunda chapa metálica, uniéndose dicha primera chapa metálica y dicha segunda chapa metálica entre sí. El dispositivo de engatillado desplaza dicho rodillo a lo largo de dicho contorno, realizándose el doblado de dicha pestaña mediante sucesivas pasadas de dicho rodillo. US2005086989 y US2005229666 divulgan un sistema de engatillado en el que únicamente un rodillo puede ser aplicado contra la pestaña de dicha chapa metálica a la vez.
En el documento EP1097759A1 se divulga un sistema de engatillado en el que dos rodillos actúan simultáneamente sobre la pestaña que se desea doblar, siguiendo un rodillo la trayectoria del rodillo precedente. Así, mientras un primer rodillo ejerce presión sobre dicha pestaña doblándola un determinado ángulo, el rodillo que sigue a dicho primer rodillo dobla dicha pestaña otro ángulo determinado, pudiéndose disminuir el tiempo necesario para unir las chapas metálicas entre sí. Dicho sistema de engatillado comprende dos brazos de robot, comprendiendo cada brazo de robot un rodillo. Cada brazo de robot se controla independientemente, pudiéndose controlar el desplazamiento de cada rodillo a lo largo de dicho contorno independientemente. Así, para realizar el doblado de dicha pestaña, se controla el desplazamiento de dichos brazos de robot independientemente.
EXPOSICIÓN DE LA INVENCIÓN
El objeto de la invención es el de proporcionar un sistema de engatillado por rodillo tal y como se describe en las reivindicaciones.
El sistema de engatillado por rodillo comprende una mesa de trabajo o cuna sobre la que se dispone una primera chapa metálica, disponiéndose una segunda chapa metálica sobre dicha primera chapa metálica y uniéndose dichas chapas metálicas entre sí mediante un proceso de engatillado. Dicha primera chapa metálica comprende una pestaña que se extiende a lo largo de todo su contorno, doblándose dicha pestaña para unir dichas chapas metálicas entre sí mediante dicho proceso de engatillado, disponiéndose dicha pestaña sobre dicha segunda chapa metálica. Dicho sistema de engatillado comprende además un primer rodillo y un segundo rodillo que se desplazan en una dirección de doblado a lo largo del contorno de la primera chapa metálica para doblar dicha pestaña, actuando dichos rodillos simultáneamente sobre dicha pestaña. Dicho primer rodillo dobla dicha pestaña hasta un ángulo intermedio determinado, doblando dicho segundo rodillo dicha pestaña hasta un ángulo de doblado.
Los rodillos se desplazan mediante un dispositivo de engatillado, comprendiendo dicho dispositivo de engatillado un único brazo de robot que tiene una herramienta de engatillado en uno de sus extremos. Dicha herramienta de engatillado comprende el primer rodillo y el segundo rodillo, teniendo que controlarse únicamente un brazo de robot para doblar la pestaña de la primera chapa metálica La herramienta de engatillado comprende además una plataforma, pudiendo desplazarse linealmente dichos rodillos de manera independiente con respecto a dicha plataforma en una dirección de desplazamiento perpendicular a la dirección de doblado, mediante un primer actuador y un segundo actuador respectivamente.
Durante el doblado, en algunos tramos curvos como los que comprenden un radio pequeño, por ejemplo, se pueden generar daños en dicha pestaña si se pasan los dos rodillos simultáneamente. Así, al poder desplazarse dichos rodillos independientemente en la dirección de desplazamiento, se disminuye el riesgo de obtener daños indeseados en dicha pestaña, posibilitándose el paso de únicamente un rodillo a la vez en dichos tramos curvos, pudiendo mantener además constante la fuerza que dicho rodillo ejerce sobre dicha pestaña a lo largo de todo el contorno.
Estas y otras ventajas y características de la invención se harán evidentes a la vista de las figuras y de la descripción detallada de la invención.
DESCRIPCIÓN DE LOS DIBUJOS
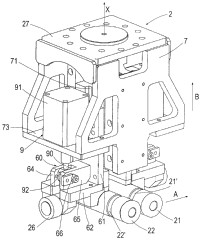
La FIG. 1 muestra una realización del sistema de engatillado de la invención.
La FIG. 2 muestra las chapas metálicas dispuestas sobre la cuna del sistema de la FIG. 1.
La FIG. 3 muestra las chapas metálicas dispuestas sobre la cuna del sistema de la FIG. 1, unidas entre sí.
La FIG. 4 muestra el primer rodillo del sistema de la FIG. 1, actuando sobre la pestaña de la primera chapa metálica.
La FIG. 5 muestra el segundo rodillo del sistema de la FIG. 1, actuando sobre la pestaña de la primera chapa metálica.
La FIG. 6 es una vista en perspectiva de la herramienta de engatillado del sistema de la FIG. 1, mostrándose el primer rodillo y el segundo rodillo.
La FIG. 7 es una vista en perspectiva de la herramienta de engatillado del sistema de la FIG. 1, mostrándose el tercer rodillo y el cuarto rodillo.
La FIG. 8 es una vista en planta de la herramienta de engatillado del sistema de la FIG. 1, sin la pieza de unión.
La FIG. 9 es una vista inferior de la herramienta de engatillado del sistema de la FIG. 1.
EXPOSICIÓN DETALLADA DE LA INVENCIÓN
En la figura 1 se muestra una realización del sistema de engatillado por rodillo de la invención. Dicho sistema de engatillado comprende una mesa de trabajo o cuna 4 sobre la que se dispone una primera chapa metálica 30, disponiéndose una segunda chapa metálica 31 sobre dicha primera chapa metálica 30 y uniéndose dichas chapas metálicas 30 y 31 entre sí mediante un proceso de engatillado. Dicha primera chapa metálica 30 comprende una pestaña 30' que se extiende a lo largo de todo su contorno, doblándose dicha pestaña 30' para unir dicha primera chapa metálica 30 con dicha segunda chapa metálica 31, disponiéndose dicha pestaña 30' sobre dicha segunda chapa metálica 31. En las figuras 2 y 3 se muestra la disposición de dichas chapas metálicas 30 y 31 antes y después del proceso de engatillado respectivamente.
El sistema de engatillado de la invención comprende además al menos un primer rodillo 21 y un segundo rodillo 22. Dichos rodillos 21 y 22 se desplazan en una dirección de doblado A a lo largo del contorno de la primera chapa metálica 30 para doblar la pestaña 30'. Dicho segundo rodillo 22 sigue la trayectoria de dicho primer rodillo 21, pudiendo actuar simultáneamente dichos rodillos 21 y 22 sobre dicha pestaña 30'. De esta manera, cuando dichos rodillos 21 y 22 actúan simultáneamente sobre dicha pestaña 30', dicho primer rodillo 21 dobla dicha pestaña 30' hasta un ángulo intermedio ø1 determinado, tal y como se muestra en la figura 4, mientras que dicho segundo rodillo 22 dobla dicha pestaña 30' desde dicho ángulo intermedio ø1 hasta un ángulo de doblado ø2, tal y como se muestra en la figura 5. En una realización preferente, dichos ángulos ø1 y ø2 pueden ser por ejemplo de 30º y de 60º respectivamente, aunque también pueden ser, por ejemplo, de 45º y de 90º, finalizándose el proceso de engatillado.
Los rodillos 21 y 22 se desplazan mediante un dispositivo de engatillado. Dicho dispositivo de engatillado comprende un único brazo de robot 1 que tiene en uno de sus extremos una herramienta de engatillado 2 mostrada en las figuras 6 y 7, estando dicha herramienta de engatillado 2 unida a dicho brazo de robot 1 mediante una pieza de unión 27. Dicha herramienta de engatillado 2 comprende dichos rodillos 21 y 22, y una plataforma 7. Dichos rodillos 21 y 22 se pueden desplazar linealmente de manera independiente con respecto a dicha plataforma 7 en una dirección de desplazamiento... [Seguir leyendo]
Reivindicaciones:
1. Sistema de engatillado por rodillo que comprende una mesa de trabajo o cuna (4) sobre la que se dispone una primera chapa metálica (30) , disponiéndose una segunda chapa metálica (31) sobre dicha primera chapa metálica (30) y uniéndose dichas chapas metálicas (30, 31) entre sí mediante un proceso de engatillado, comprendiendo dicha primera chapa metálica (30) una pestaña (30') que se extiende a lo largo de todo su contorno y doblándose dicha pestaña (30') para unir dichas chapas metálicas (30, 31) entre sí mediante dicho proceso de engatillado, disponiéndose dicha pestaña (30') sobre dicha segunda chapa metálica (31) , comprendiendo además dicho sistema de engatillado al menos un primer rodillo (21) y un segundo rodillo (22) que se desplazan en una dirección de doblado (A) a lo largo del contorno de la primera chapa metálica (30) para doblar dicha pestaña (30') , pudiendo actuar dichos rodillos (21, 22) simultáneamente sobre dicha pestaña (30') , de tal manera que dicho primer rodillo (21) dobla dicha pestaña (30') hasta un ángulo intermedio (ø1) determinado, doblando dicho segundo rodillo (22) dicha pestaña (30') hasta un ángulo de doblado (ø2) , desplazándose dichos rodillos (21, 22) mediante un dispositivo de engatillado, caracterizado porque dicho dispositivo de engatillado comprende un único brazo de robot (1) que tiene una herramienta de engatillado (2) en uno de sus extremos, comprendiendo dicha herramienta de engatillado (2) los rodillos (21, 22) y una plataforma (7) , pudiéndose desplazar linealmente dichos rodillos (21, 22) de manera independiente con respecto a dicha plataforma (7) en una dirección de desplazamiento (B) perpendicular a la dirección de doblado (A) mediante un primer actuador (8) y un segundo actuador (9) respectivamente.
2. Sistema según la reivindicación anterior, en donde los rodillos (21, 22) están unidos a un primer soporte móvil y a un segundo soporte móvil respectivamente, estando unos extremos móviles (82, 92) de dichos actuadores (8, 9) unidos al soporte móvil correspondiente mediante unos medios de fijación (50, 60) dispuestos en dichos soporte móviles, de tal manera que dichos actuadores (8, 9) provocan el desplazamiento lineal de dichos soportes móviles, y por tanto de dichos rodillos (21, 22) , en la dirección de desplazamiento (B) .
3. Sistema según la reivindicación anterior, en donde la plataforma (7) comprende una primera ranura guía (70) y una segunda ranura guía (71) que se extienden en la dirección de desplazamiento (B) , comprendiendo cada soporte móvil un saliente (53, 63) , y cooperando dichos salientes (53, 63) con dicha primera ranura (70) y dicha segunda ranura (72) respectivamente, cuando dichos soportes móviles se desplazan linealmente en la dirección de desplazamiento (B) .
4. Sistema según la reivindicación anterior, en donde los soportes móviles comprenden una forma sustancialmente de L, con un segmento de guiado (51, 61) sustancialmente paralelo a la dirección de desplazamiento (B) y un segmento de fijación (52, 62) sustancialmente paralelo a la dirección de doblado (A) , estando los medios de fijación (50, 60) dispuestos sobre el segmento de fijación (52, 62) correspondiente, y estando los salientes (53, 63) dispuestos en el segmento de guiado (51, 61) correspondiente.
5. Sistema según la reivindicación anterior, en donde el segmento de fijación (51) del primer soporte móvil se extiende en la dirección de doblado (A) , extendiéndose el segmento de fijación (61) del segundo soporte móvil en el sentido opuesto a dicha dirección de doblado (A) .
6. Sistema según cualquiera de las reivindicaciones anteriores, en donde la plataforma (7) comprende una primera base (72) y una segunda base (73) perpendiculares a la dirección de desplazamiento (B) , estando el primer actuador (8) fijado a dicha primera base (72) y estando el segundo actuador (9) fijado a dicha segunda base (73) .
7. Sistema según cualquiera de las reivindicaciones anteriores, en donde los actuadores (8, 9) son cilindros neumáticos.
8. Sistema según cualquiera de las reivindicaciones 2 a 7, en donde la herramienta de engatillado (2) comprende al menos un primer eje longitudinal (10) unido al primer soporte móvil y un segundo eje longitudinal (11) unido al segundo soporte móvil, siendo dichos ejes longitudinales (10, 11) paralelos entre sí y perpendiculares a la dirección de desplazamiento (B) , estando el primer rodillo (21) unido a un extremo de dicho primer eje longitudinal (10) y estando el segundo rodillo (22) unido a un extremo de dicho segundo eje longitudinal (11) , uniéndose dichos rodillos (21, 22) a dichos soportes móviles mediante dichos ejes longitudinales (10, 11) .
9. Sistema según la reivindicación anterior, que comprende un tercer rodillo (23) unido al segundo eje longitudinal (11) en el extremo opuesto al extremo del segundo rodillo (22) , y un cuarto rodillo (24) unido al primer eje longitudinal (10) en el extremo opuesto al extremo del primer rodillo (21) .
10. Sistema según cualquiera de las reivindicaciones 8 ó 9, en donde la herramienta de engatillado (2) comprende al menos un primer rodillo adicional (25) que se desplaza solidario con el primer eje longitudinal (10) , y un segundo rodillo adicional (26) que se desplaza solidario con el segundo eje longitudinal (11) .
11. Sistema según cualquiera de las reivindicaciones anteriores, en donde la cuna (4) comprende una pista mecanizada (40) a lo largo de todo su contorno, estando dispuesta dicha pista mecanizada (40) paralela a la pestaña (30') de la primera chapa metálica (30) , y los rodillos (21, 22) comprenden una ranura transversal (21', 22') dispuesta en su superficie externa adaptada para cooperar con dicha pista mecanizada (40) , de tal manera que cuando dichos rodillos (21, 22) se desplazan a lo largo del contorno de dicha primera chapa metálica (30) para doblar dicha pestaña (30') en la dirección de doblado (A) , dichas ranuras (21', 22') cooperan con dicha pista mecanizada (40) guiándose el desplazamiento de dichos rodillos (21, 22) a lo largo de dicho contorno.
12. Sistema según la reivindicación anterior, en donde la pista mecanizada (40) comprende una superficie de apoyo (41) , apoyándose el segundo rodillo (22) sobre dicha superficie de apoyo (41) , de tal manera que al doblar la pestaña (30') , la superficie de contacto de dicho segundo rodillo (22) con dicha pestaña (30') está alineada con dicha superficie de apoyo (41) .
FIG. 2
FIG. 3
FIG. 4
FIG. 5
FIG. 6
FIG. 7
FIG. 8
FIG. 9
Patentes similares o relacionadas:
Dispositivo y procedimiento de cabezal de dobladillado, del 1 de Julio de 2020, de COMAU S.P.A.: Un dispositivo de dobladillado para su uso en una operación de formación del metal en una pieza de trabajo, el dispositivo de dobladillado comprendiendo: […]
Compuesto de chapa metálica, método para unir chapas y dispositivo de unión, del 4 de Marzo de 2020, de FFT Produktionssysteme GmbH & Co. KG: Un compuesto de chapa metalica, que es un constituyente de una parte de union movil o inamovible, especificamente una puerta, techo solar, puerta trasera, tapa […]
Cuchilla y procedimiento de engarce de chapas, del 11 de Diciembre de 2019, de PSA Automobiles SA: Cuchilla de plegado de un borde de una chapa metálica , que comprende una superficie de contacto […]
Objetos de metal galvanizado y su proceso de fabricación, del 8 de Mayo de 2019, de Fontaine Holdings NV: Un proceso para fabricar un objeto tridimensional de acero galvanizado con una forma que incluye múltiples bordes, comprendiendo dicho proceso, en el siguiente […]
Cabezal de herramienta para realizar operaciones industriales que tiene un sistema de monitoreo inalámbrico, del 10 de Agosto de 2016, de COMAU S.P.A.: Un sistema de realización de operaciones industriales, que comprende: - al menos un cabezal (H) de herramienta provisto de una herramienta ; - al menos un […]
Película adhesiva estructural, del 8 de Junio de 2016, de 3M INNOVATIVE PROPERTIES COMPANY: Una película adhesiva estructural que comprende una composición termoendurecible, que comprende: a) de 40 a 60% en peso de un compuesto epoxídico que tiene […]
MÁQUINA DE ENGATILLADO, del 6 de Junio de 2016, de INGEMAT, S.L: Máquina de engatillado que comprende un carro móvil con desplazamiento lineal en dos sentidos y guiado en un carro fijo; donde el carro móvil se desplaza mediante […]
Dispositivo para el engarce de dos chapas por fricción y su procedimiento de puesta en práctica, del 25 de Mayo de 2016, de PEUGEOT CITROEN AUTOMOBILES S.A.: Dispositivo de engarce por fricción del tipo que comprende al menos una herramienta de engarce concebida para abatir un primer […]