Sistema de detección de la luz y medición de la distancia.
Un espejo de detección de la luz y medición de la distancia (16),
que comprende:
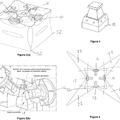
una parte receptora (22); y una parte transmisora (20), estando los respectivos centroides (30) de las partes receptora y transmisora (22, 20) situados en un punto común sobre el eje de exploración (26), rotando (24) las partes receptora y transmisora (22, 20) sobre el eje de exploración (26), estando la parte transmisora (20) situada de manera que refleje un pulso de luz hacia el objetivo (40) como un punto transmitido (42), estando la parte receptora (22) situada para dirigir el pulso de luz reflejado del objetivo (40) a la parte receptora (22) como el campo de visión de la parte receptora (44), caracterizado porque:
la parte transmisora (20) está compensada por un ángulo (56) sobre el eje de exploración (26) con relación al plano de superficie de la parte receptora;
y el campo de visión de la parte receptora (44) coincide con el punto transmitido (42) en función de la distancia al objetivo (40).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10001506.
Solicitante: ROSEMOUNT AEROSPACE INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 14300 JUDICIAL ROAD BURNSVILLE, MN 55306 ESTADOS UNIDOS DE AMERICA.
Inventor/es: Ray,Mark D, Swenson,James W, Meneely,Cilinton T.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S17/42 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Medida simultánea de la distancia y de otras coordenadas (medida indirecta G01S 17/46).
- G01S7/481 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › Características constructivas, p. ej. disposiciones de elementos ópticos.
- G01S7/497 G01S 7/00 […] › Medios para monitorización o calibración.
PDF original: ES-2380061_T3.pdf
Fragmento de la descripción:
Sistema de detección de la luz y medición de la distancia
Antecedentes
[0001] La presente invención hace referencia a un espejo de detección de la luz y medición de la distancia. Se utiliza en especial en conjunción con un sistema de detección y medición del alcance de la luz (LIDAR) y se describirá con relación al mismo. Sin embargo, se apreciará que la invención también es apta para otras aplicaciones. [0002] El sistema de detección y medición del alcance de la luz (LIDAR) transmite un pulso de luz (p.ej., desde un láser) , que es reflejado desde un objetivo. Un receptor óptico detecta la luz reflejada, y la distancia hasta el objetivo se calcula a partir del tiempo de retardo entre la transmisión del pulso de luz y la detección de la luz reflejada. El campo de visión del receptor y el haz de luz transmitido normalmente se ajustan y coalinean para garantizar la máxima eficacia en la recogida de luz. Si el LIDAR contiene un escáner óptico rápido (como un espejo que se mueva con rapidez) , es posible que el campo de visión del receptor pierda la alineación con respecto al haz de luz proyectado. Dicha pérdida de alineación es causada por un cambio en la dirección hacia la que apunta que tiene lugar durante el tiempo necesario para que el pulso de luz viaje hasta el objetivo, se refleje, y vuelva al receptor. La magnitud de la desviación es un "ángulo de retardo", que depende de la velocidad del escáner y de la distancia del objetivo. Para un escáner LIDAR que se encuentra "limitado por difracción" (es decir, la divergencia del haz de luz está limitada únicamente por la longitud de onda y el diámetro del haz en la apertura de salida del LIDAR) , la velocidad angular del escáner w½ (medida en radianes/segundo) para la que el ángulo de retardo es la mitad de la divergencia del haz de luz transmitido es:
donde A es la longitud de onda de la luz transmitida (en metros) , c es la velocidad de la luz (~ 3 x 108 metros/segundo) D es el diámetro del haz de luz transmitido en la apertura de salida del LIDAR (en metros) , y R es la distancia hasta el objetivo (en metros) .
Si el campo de visión del receptor está alineado inicialmente con un cono de iluminación de la luz transmitida, la señal recibida es reducida por el ángulo de retardo. El efecto empeora en distancias mayores y a medida que aumenta la velocidad del escáner. [0004] Si el sistema LIDAR no está limitado por difracción y la divergencia del haz transmitido es º en su lugar, entonces la fórmula anterior pasa a ser:
Por ejemplo, si la divergencia del haz de luz transmitido es de 2 milirradianes (mrad) y la distancia al objetivo es de 3 km, la velocidad angular a la que el ángulo de retardo es la mitad del ancho del haz transmitido es de 50 radianes/segundo, o 480 revoluciones/minuto (rpm) . En ese caso, si el campo de visión del receptor se ajusta a la divergencia del haz de luz transmitido, el ángulo de retardo seguirá siendo lo suficientemente pequeño para que el receptor óptico detecte alguna cantidad reducida de luz dispersada desde el objetivo, pero para velocidades del escáner superiores a 960 rpm, el efecto del ángulo de retardo provoca que el campo de visión del receptor pierda u oscurezca completamente la señal a partir de los 3 km en adelante. La condición para este oscurecimiento completo es:
Todos los sistemas LIDAR, tanto si es de barrido como fijo, a menudo deben hacer frente a otra cuestión, el amplio margen dinámico de señal. El margen dinámico de señal es la relación entre la máxima intensidad de la señal de luz detectable (es decir, la saturación del detector) y la mínima intensidad de la señal de luz detectable. La señal detectada decrece rápidamente a medida que aumenta la distancia del objetivo. Por lo tanto, las señales recibidas desde objetivos a distancias más cortas pueden sobresaturar el detector, mientras que aquellas que vienen de objetivos a distancias mayores apenas pueden ser detectadas. Una técnica de diseño conocida como "compresión geométrica" puede reducir el margen dinámico de señal controlando la coincidencia fija de los campos de visión ópticos del transmisor y el receptor, la separación de la óptica del receptor y el transmisor, y el ensombrecimiento del receptor por la óptica del transmisor para atenuar la señal a distancias cortas. El tiempo de retardo de la señal de luz recibida con respecto al pulso de luz transmitido no entra en este cálculo de compresión ya que estos parámetros de diseño son estáticos. La compresión geométrica puede beneficiar tanto a los sistemas LIDAR de barrido como a los fijos. [0006] La patente DE 691 14 461 revela un dispositivo de telemetría para detectar y localizar objetos por retrodispersión, en especial humo de incendios forestales o aerosoles. El dispositivo incluye una fuente láser que emite pulsos repetitivos, un medio de detección del haz retrodispersado, y una cabeza dirigible que orienta el azimut y elevación del haz de láser emitido. Una cabeza reflectante 4 incluye un espejo plano principal 17 (espejo receptor) sobre el que se monta un espejo secundario 18 (espejo transmisor) . El espejo secundario 18 está centrado con respecto al espejo principal 17 en un eje pivotante 24. Un haz emitido 19 se refleja en un espejo 20 hacia el espejo transmisor 18. El haz recibido 16 es reflejado por el espejo receptor 17 hacia el espejo 11 y después el espejo 12 antes de ser dirigido por el espejo 12 (y un espejo 15) al detector 2. La dimensión y el ángulo del espejo 20 protegen el detector 2 del fenómeno de deslumbramiento. [0007] La patente EP 0 173 617 A revela un sistema de transceptor láser para imágenes de video. Un iluminador láser 1 crea un haz de láser a lo largo de una dirección de observación. El receptor 2 incluye un detector 22 para detectar la radiación de luz láser reflejada por un objetivo iluminado. Un dispositivo de separación de trayectoria y de exploración 3 dirige la radiación reflejada al detector y desplaza el haz mediante una rotación angular para explorar una zona predeterminada. Los medios de desviación óptica 41, 42 producen un desplazamiento angular relativo entre la dirección de observación del iluminador y la del receptor para compensar la rotación de exploración mientras el haz de luz se conduce de un lado a otro entre el sistema y el objetivo iluminado. Los medios de desviación óptica incluyen un deflector óptico 41, que es controlado mediante un circuito de control 42 según las variaciones en la velocidad de exploración y distancia al objetivo. [0008] La patente US 4.311.385 revela un sistema láser de exploración de detección que incluye ópticas 18 que compensan las desviaciones angulares de la señal recibida. Un control 48 rota las ópticas que compensan el ángulo de retardo 18 para alinear ópticamente la señal de referencia y la señal recibida de forma que sean paralelas entre ellas a lo largo de la trayectoria óptica 40. [0009] La patente US 5.485.009 revela un sistema láser de procesamiento de imágenes que incluye un iluminador láser que transmite un haz de luz a lo largo de una dirección de señalización. El receptor incluye un dispositivo de detección que detecta la radiación láser que vuelve de un objeto. El dispositivo de detección incluye un conjunto lineal de N elementos yuxtapuestos. El receptor incluye un circuito electrónico que incluye N canales de detección y cuenta con circuitos de identificación de la distancia mediante el rango de los canales de detección. Los circuitos de compensación del desplazamiento de tiempo que presentan las señales de vídeo en función de la distancia devuelven el objeto iluminado a una posición angular correcta. [0010] La patente US 4.326.799 revela un sistema de exploración que combina la detección activa y pasiva de radiación desde los objetivos. En el modo activo, se explora un haz de láser con una cuña giratoria con un patrón Palmer orientado hacia abajo. Una parte del haz se refleja desde los objetivos. Cuatro transductores de inclinación, colocados en ángulo recto unos respecto a otros entre una superficie externa de la cuña de exploración 124 y un anillo interior 140, compensan la falta de registro de un haz de señal recibido. [0011] La patente US 3.523.730 revela un sistema de localización de objetos. Los láseres emiten pulsos "largos" de manera que la duración de cada pulso sea larga en comparación con el tiempo que necesita la luz para propagarse hasta un objeto y volver. Se mide la distancia mediante la exploración de un haz estrecho en un campo de visión en el que se incluye el objeto. Se utiliza el ángulo entre el haz transmitido y el haz relejado para determinar la distancia hasta el objeto. [0012] La presente invención proporciona... [Seguir leyendo]
Reivindicaciones:
1. Un espejo de detección de la luz y medición de la distancia (16) , que comprende:
una parte receptora (22) ; y una parte transmisora (20) , estando los respectivos centroides (30) de las partes receptora y transmisora (22, 20) situados en un punto común sobre el eje de exploración (26) , rotando (24) las partes receptora y transmisora (22, 20) sobre el eje de exploración (26) , estando la parte transmisora (20) situada de manera que refleje un pulso de luz hacia el objetivo (40) como un punto transmitido (42) , estando la parte receptora (22) situada para dirigir el pulso de luz reflejado del objetivo (40) a la parte receptora (22) como el campo de visión de la parte receptora (44) , caracterizado porque:
la parte transmisora (20) está compensada por un ángulo (56) sobre el eje de exploración (26) con relación al plano de superficie de la parte receptora; y el campo de visión de la parte receptora (44) coincide con el punto transmitido (42) en función de la distancia al objetivo (40) .
2. El espejo de detección de la luz y medición de la distancia (16) según lo expuesto en la reivindicación 1, en el que el campo de visión de la parte receptora (44) coincide cada vez más con el punto transmitido (42) a medida que aumenta la distancia al objetivo (40) .
3. El espejo de detección de la luz y medición de la distancia (16) según lo expuesto en la reivindicación 1, en el que la intensidad del pulso de luz reflejado del objetivo (40) a la parte receptora (22) está en función de la coincidencia entre el campo de visión de la parte receptora (44) y el punto transmitido (42) .
Dibujos
Patentes similares o relacionadas:
Sistema y método de medición de coordenadas, del 15 de Julio de 2020, de NPL Management Limited: Un sistema de deteccion de posicion para detectar la posicion tridimensional de una pluralidad de objetivos , que incluye: una pluralidad de objetivos […]
Método de medición de una distancia, del 17 de Junio de 2020, de The Chugoku Electric Power Co., Inc: Un método de medición de una distancia que comprende: instalar un miembro de referencia en una superficie de un primer miembro metálico (P1), e instalar un miembro […]
LIDAR basado en SMEM, del 19 de Febrero de 2020, de Windar Photonics A/S: Un sistema LIDAR que comprende: - una sección generadora de haz adaptada para generar un haz de salida ; - una pluralidad de unidades ópticas de enfoque […]
Dispositivo electrónico a medida del casco para una embarcación, del 1 de Enero de 2020, de Consilium SAL Navigation AB: Una disposición para una embarcación marina, en la que la disposición comprende: un asiento que comprende un orificio de paso […]
 Cámara, del 27 de Noviembre de 2019, de Nctech Ltd: Cámara panorámica que presenta un campo de visión global de 360° y configurada para capturar una imagen de 360° de una escena que se extiende alrededor […]
Cámara, del 27 de Noviembre de 2019, de Nctech Ltd: Cámara panorámica que presenta un campo de visión global de 360° y configurada para capturar una imagen de 360° de una escena que se extiende alrededor […]
Dispositivo optoelectrónico, del 6 de Noviembre de 2019, de VISHAY SEMICONDUCTOR GMBH: Dispositivo sensor optoelectrónico con: al menos un emisor optoelectrónico y al menos un receptor optoelectrónico , un medio de almacenamiento […]
Aparato de detección de luz de alta velocidad, del 30 de Octubre de 2019, de Artilux Inc: Aparato óptico que comprende: un sustrato semiconductor de silicio [reivindicación 14]; una capa de germanio-silicio acoplada al sustrato semiconductor, […]
Unidad modular de irradiación láser, del 28 de Agosto de 2019, de MBDA Deutschland GmbH: Unidad de irradiación láser para irradiar un objeto objetivo con radiación láser de alta potencia , comprendiendo la unidad de irradiación […]