SISTEMA DE ADQUISICIÓN DE IMÁGENES PARA APLICACIONES DE ASISTENCIA A LA CONDUCCIÓN DE VEHÍCULOS AUTOMÓVILES ADAPTABLE AUTOMÁTICAMENTE EN FUNCIÓN DEL ENTORNO DE CONDUCCIÓN Y DEL PROPIO VEHÍCULO.
Sistema de adquisición de imágenes para aplicaciones de asistencia a la conducción de vehículos automóviles adaptable automáticamente en función del entorno de conducción y del propio vehículo,
que comprende:
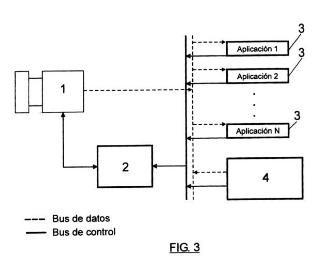
- una cámara (1) de óptica de focal variable instalada en el vehículo encargada de capturar las imágenes;
- un módulo de control (2) de la cámara (1) configurada para recibir de cada aplicación de asistencia a la conducción·(3), una información de estado que indique si la aplicación (3) está activa o no y un rango de funcionamiento óptimo del ángulo de visión de la cámara (1) y, en función de dichos datos, ajustar el ángulo de visión de la cámara (1) para optimizar el funcionamiento de las aplicaciones de visión (3) que estén activas.
Las aplicaciones de asistencia a la conducción (3) y el módulo de control (2) pueden recibir información de una pluralidad de sensores (4) instalados en el vehículo.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200900019.
Solicitante: FUNDACION PARA LA PROMOCION DE LA INNOVACION, INVESTIGACION Y DESARROLLO TECNOLOGICO EN LA INDUSTRIA DE AUTOMOCION DE GALICIA.
Nacionalidad solicitante: España.
Inventor/es: SANCHEZ PONS,FRANCISCO JOSE, SANCHEZ FERNANDEZ,DAVID, PAN CARNEIRO,SANTIAGO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06T5/00 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Perfeccionamiento o restauración de imagen.
Fragmento de la descripción:
Sistema de adquisición de imágenes para aplicaciones de asistencia a la conducción de vehículos automóviles adaptable automáticamente en función del entorno de conducción y del propio vehículo.
Campo de la invención
La presente invención tiene como objetivo principal su aplicación en el desarrollo y utilización en sistemas de asistencia a la conducción basados en visión.
Antecedentes de la invención
En el desarrollo de sistemas de asistencia a la conducción basados en visión uno de los elementos más importantes y determinantes a evaluar es la cámara o cámaras que se van a utilizar para adquirir las imágenes. Seleccionar de forma adecuada la solución que mejor cumpla los requisitos del sistema es indispensable para obtener buenos resultados. De forma general podemos distinguir, para cualquier cámara empleada en aplicaciones de asistencia a la conducción, tres características que las describen: óptica, sensor y conexionado.
La óptica es el conjunto de lentes que concentran los rayos de luz visible y los proyectan sobre el sensor de imagen. Uno de los parámetros más importantes de una óptica es la distancia focal. Este valor determina el ángulo de visión que ve la cámara.
El sensor y la electrónica que lo acompaña, son los elementos de la cámara encargados de transformar la radiación de luz visible en una señal eléctrica. Esta señal es adaptada para que posteriormente pueda ser transmitida hacia el PC o plataforma hardware. Existen multitud de características que definen un sensor, que deberán ser tenidas en cuenta a la hora de escoger el más adecuado para cada aplicación.
En cuanto al conexionado, la cámara debe poder ser conectada a un PC o plataforma hardware donde se reciban las imágenes a procesar. Actualmente existen diferentes soluciones de conexionado: USB, Ethernet, LVDS, etc. Su elección dependerá de las necesidades de cada aplicación. Para algunos modelos de cámaras, la conexión debe permitir también una comunicación en sentido contrario, para poder enviar información de control a la cámara.
La distancia focal, o longitud focal de una lente, es un parámetro muy importante a tener en cuenta a la hora de seleccionar la óptica a utilizar. Este valor se describe como la distancia entre el centro óptico de la lente y su foco (o punto focal). La distancia focal y el tamaño del sensor de imagen determinan el ángulo de visión observado (FOV, Field Of View), que se puede obtener con la siguiente ecuación:
Donde focalLenght es la distancia focal y sensorSizeH y sensorSizeV son las dimensiones horizontal y vertical del sensor respectivamente. Las dimensiones del sensor se obtienen a partir de dos valores, que son el tamaño de píxel y la resolución.
El tamaño de píxel es precisamente el tamaño real que ocupa en el sensor el área dedicada a almacenar la información de imagen equivalente a un píxel. La resolución indica el número de píxeles horizontal y vertical de la imagen que entrega el sensor. En la siguiente tabla, Tabla 1, se muestra un ejemplo de un sensor con tamaño de píxel de 6 micras y una resolución de 752x480 píxeles.

Los sensores suelen ser rectangulares por lo que los ángulos de visión horizontal y vertical son distintos. En la Figura 1 se representa el área de incidencia de la imagen proyectada por la óptica (círculo a rayas) sobre el sensor (rectángulo). Vemos que para cubrir todo el sensor el área de imagen procedente de la óptica es mayor que la del sensor. En la siguiente tabla, Tabla 2, podemos ver algunos ángulos de visión para distintas focales.

El ángulo de visión (FOV) determina cómo vemos la información presente en la escena. Con un ángulo de visión mayor tendremos información más amplia de la escena, pero como contrapartida, los objetos los veremos más pequeños. Si tenemos un ángulo de visión menor, perderemos la información de los objetos situados en nuestros laterales, pero veremos más cerca objetos situados a lo lejos.
A la hora de desarrollar aplicaciones basadas en visión, escoger cuál va a ser la óptica a utilizar suele ser siempre una decisión de compromiso. Esto es así porque la intención es poder realizar el mayor número de aplicaciones de asistencia a la conducción usando las imágenes procedentes del mismo sensor. Pero en función de la aplicación sabemos que en algunas de ellas sería deseable tener una distancia focal mayor y en otros menor. Por ejemplo, aplicaciones como la detección de peatones preferirán una óptica de mayor FOV para poder disponer de una mejor visión perimetral entorno a nuestro vehículo, mientras que para aplicaciones como detección de vehículos funcionarán mejor con ópticas de menor FOV, que permiten ver objetos lejanos con mayor tamaño.
De la misma manera, para una misma aplicación también sería deseable poder modificar el FOV en función de las condiciones en las que nos encontramos. Por ejemplo las aplicaciones podrían realizar variaciones del FOV en función de la velocidad a la que circulemos con el vehículo o dependiendo del ángulo de giro del volante. La Figura 2 muestra ejemplos de aplicaciones de visión para detectar peatones y para detectar vehículos. Para detección de vehículos una óptica de menor ángulo de visión permitiría ver los vehículos más cercanos y mejorar las prestaciones de la detección. En el caso de detección de vehículos interesa que a altas velocidades disminuyamos el FOV para poder centrarnos en los vehículos más lejanos, e ir ampliando este valor a medida que se reduce la velocidad ya que empieza a ser más relevante la información de los laterales, para la detección de los peatones.
La mayoría de las aplicaciones de visión pueden desactivarse dependiendo de varios factores, como encontrarse en rangos de velocidad de no funcionamiento, deshabilitación por usuario o por problemas en los algoritmos de procesado de imagen. Este estado de desconexión es conocido por cada aplicación, por lo que, en cualquiera de estas circunstancias, se podría adecuar la posición de la óptica en el estado más idóneo para aquellas aplicaciones que sí están activas.
La presente invención utiliza cámaras con ópticas de focal variable en tiempo real en aplicaciones de automoción, en el campo de asistencia a la conducción, con lo que es posible implementar simultáneamente distintas aplicaciones con requerimientos diferentes. Un sistema como el reconocimiento de vehículos, por ejemplo, precisa de una distancia de detección y seguimiento elevada, siendo ésta mayor a medida que la velocidad aumenta. En este caso, la distancia focal de la cámara podría aumentar de cara a obtener más información de los objetos lejanos. Por el contrario, a baja velocidad, largas distancias no son necesarias y comienza a ser importante el campo lateral. Esto también sucede en otras aplicaciones como la detección de peatones, con mayor importancia de campo lateral, o la detección de líneas de carril, donde la distancia cobra un importante valor.
Descripción de la invención
La invención se refiere a un sistema de adquisición de imágenes para aplicaciones de asistencia a la conducción de vehículos automóviles, adaptable automáticamente en función del entorno de conducción y del propio vehículo, de acuerdo con la reivindicación 1. Realizaciones preferidas del sistema se definen en las reivindicaciones depen- dientes.
El sistema comprende:
- una cámara de óptica de focal variable instalada en el vehículo encargada de capturar las imágenes;
- un módulo de control de la cámara configurada para recibir de cada aplicación de asistencia...
Reivindicaciones:
1. Sistema de adquisición de imágenes para aplicaciones de asistencia a la conducción de vehículos automóviles adaptable automáticamente en función del entorno de conducción y del propio vehículo, caracterizado porque comprende:
- una cámara (1) de óptica de focal variable instalada en el vehículo encargada de capturar las imágenes;
- un módulo de control (2) de la cámara (1) configurada para recibir de cada aplicación de asistencia a la conducción (3) una información de estado que indique si la aplicación (3) está activa o no y un rango de funcionamiento óptimo del ángulo de visión de la cámara (1) y, en función de dichos datos, ajustar el ángulo de visión de la cámara (1) para optimizar el funcionamiento de las aplicaciones de visión (3) que estén activas.
2. Sistema de adquisición de imágenes según reivindicación 1, caracterizado porque el módulo de control (2) está adicionalmente configurado para recibir información de una pluralidad de sensores (4) instalados en el vehículo y utilizar dicha información, junto con la suministrada por las aplicaciones de asistencia a la conducción (3), para determinar el ajuste del ángulo de visión de la cámara (1).
3. Sistema de adquisición de imágenes según cualquiera de las reivindicaciones anteriores, caracterizado porque las aplicaciones de asistencia a la conducción (3) están adicionalmente configuradas para recibir información de una pluralidad de sensores (4) instalados en el vehículo y utilizar dicha información para definir al menos una de las siguientes:
- el rango de funcionamiento óptimo de ángulo de visión de la cámara (1);
- el estado de la aplicación de asistencia a la conducción (3).
Patentes similares o relacionadas:
MÉTODO Y SISTEMA PARA CONVERTIR UNA IMAGEN DIGITAL DE COLOR A ESCALA DE GRISES, del 16 de Julio de 2020, de UNIVERSIDAD NACIONAL DE EDUCACION A DISTANCIA (UNED): Se describe un método y sistema para convertir una imagen en color a escala de grises aplicable dentro del campo del tratamiento de imágenes […]
Dispositivo y método de procesamiento de imágenes, del 15 de Julio de 2020, de DOLBY INTERNATIONAL AB: Un dispositivo de procesamiento de imágenes para producir una imagen restaurada a partir de una imagen degradada de entrada, comprendiendo la imagen […]
Mejora de imagen endoscópica usando ecualización de histograma adaptativo limitado por contraste (CLAHE) implementada en un procesador, del 1 de Julio de 2020, de EndoChoice, Inc: Un procedimiento para mejorar imágenes obtenidas por al menos dos elementos de visualización en un sistema de endoscopio usando un algoritmo de ecualización […]
Un sistema de rayos X con procedimientos implementados por ordenador para el procesamiento de imágenes, del 10 de Junio de 2020, de ControlRAD Systems Inc: Un sistema de rayos X que comprende una fuente de rayos X, al menos un filtro de rayos X parcialmente transparente, un detector de rayos X, un monitor para desplegar imágenes […]
Método y dispositivo de procesamiento de imágenes, del 11 de Marzo de 2020, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un método de procesamiento de imágenes, que comprende: controlar una primera cámara para capturar una pluralidad de primeras imágenes […]
Procedimiento de procesamiento de imágenes y dispositivo electrónico que implementa el mismo, del 4 de Marzo de 2020, de SAMSUNG ELECTRONICS CO., LTD.: Un procedimiento de procesamiento de una imagen en un dispositivo electrónico, comprendiendo el procedimiento: predecir el número […]
Método para la fusión de imágenes de Resonancia Magnética y Tomografía Computerizada en un archivo imprimible en 3D para su uso en fabricación aditiva, del 2 de Marzo de 2020, de SERVICIO DE RADIOLOGIA COMPUTERIZADA SL: Este método se enmarca en el campo de las herramientas de visualización tridimensional interactiva para el apoyo e interpretación de la planificación prequirúrgica […]
Método y dispositivo de procesamiento de imágenes, medio de almacenamiento legible por computadora y dispositivo electrónico, del 26 de Febrero de 2020, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un método de procesamiento de imágenes implementado por computadora, que comprende: seleccionar una imagen de referencia de entre una pluralidad […]