OBSERVADOR DE ESTADOS BASADO EN UN MODELO VIRTUAL DE DINÁMICA MULTICUERPO.
Observador de estados basado en un modelo virtual de dinámica multicuerpo,
comprendiendo:
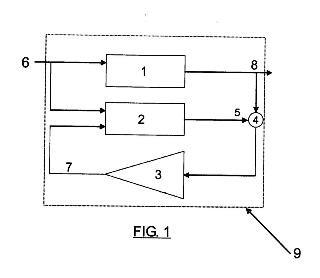
- un modelo virtual de un sistema real (1) a observar para estimar, a partir de unas variables de entrada (6) del sistema real y unas señales de corrección (7), unas variables de estado (5) del sistema real (1);
- medios de comparación (4) para comparar unas variables de salida (8) con las correspondientes variables de estado (5) estimadas por el modelo virtual;
- medios de cálculo de corrección (3) para calcular las señales de corrección (7) y de enviar dichas señales al modelo·virtual;
siendo el modelo virtual empleado un modelo virtual de dinámica multicuerpo (10) en el que los distintos elementos del sistema real (1) se representan como sólidos rígidos, disponiendo de medios para adaptar los sistemas de ecuación propios de un modelo multicuerpo al formato del espacio de estado empleado por los modelos virtuales de los observadores de estado.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200801542.
Solicitante: FUNDACION PARA LA PROMOCION DE LA INNOVACION, INVESTIGACION Y DESARROLLO TECNOLOGICO EN LA INDUSTRIA DE AUTOMOCION DE GALICIA.
Nacionalidad solicitante: España.
Inventor/es: SANCHEZ FERNANDEZ,DAVID, BENITO FORTÚN,GUILLERMO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05B17/00 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › Sistemas que implican el uso de modelos o de simuladores de dichos sistemas (G05B 13/00, G05B 15/00, G05B 19/00 tienen prioridad; computadores analógicos para procedimientos, sistemas o dispositivos específicos, p. ej. simuladores, G06G 7/48).
Fragmento de la descripción:
Observador de estados basado en un modelo virtual de dinámica multicuerpo.
Campo de la invención La presente invención tiene el objetivo inicial de aplicarla en el campo de los controles activos de chasis en vehículos automóviles. Su uso no queda limitado, no obstante, a este sector, siendo aprovechable en otras áreas de la técnica en la que los observadores de estado sean de aplicación.
Antecedentes de la invención Los observadores de estado son un recurso habitual en aplicaciones que requieran la estimación de variables de funcionamiento de un mecanismo o proceso cuya medición directa resulta técnica o económicamente inviable o poco práctica. Los observadores permiten estimar el valor de estas variables en función del conocimiento que se pueda obtener de otras variables más sencillas de medir directamente.
Esta capacidad se basa en el empleo de modelos virtuales del sistema real a observar que contengan tanto aquellas variables que sí es posible medir directamente en el sistema real, como aquellas que queramos simplemente estimar u observar porque no vayan a ser medidas directamente. Comparando las lecturas reales de las variables que es posible medir con las correspondientes calculadas por el modelo, es posible realizar en el modelo virtual sucesivas correcciones que consigan que el modelo refleje fielmente el comportamiento del modelo real, tanto en aquellas variables comparadas con las reales, como con aquéllas que no es posible medir. Conseguido esto, es posible tomar estas últimas como fieles reflejo de las reales, aunque no sea posible medirlas. Es así como los observadores de estado proporcionan estimaciones totalmente válidas de variables de un sistema que no es posible medir directamente. El ejemplo más extensamente utilizado de observador de estados es el denominado Filtro de Kalman.
La efectividad de los observadores de estado viene condicionada por la complejidad del modelo virtual a emplear en el observador. Cuanto mayor sea ésta, más detallada información del sistema real estará disponible, y más factible será que siga el comportamiento del sistema real merced a las correcciones continuas realizadas por el observador.
En el campo concreto de la dinámica vehicular dentro de la ingeniería de automoción, los observadores de estado han recibido una notable atención durante los últimos años como una fuente de información del comportamiento de vehículo.
La principal variable que estos sistemas intentan controlar es el ángulo de deriva lateral de la carrocería, entre el plano longitudinal de la carrocería y el vector velocidad instantánea. Como variable a controlar, es necesario en primer lugar conocer su valor en cada instante. Sin embargo, su medición directa sólo resulta posible hoy en día a través de sensores con un elevado coste, cuya implementación en vehículos de serie resulta económicamente inviable, y que quedan por tanto restringidos al ámbito del desarrollo del vehículo por parte de los fabricantes de vehículos y sistemas, y centros de investigación.
Los observadores de estado suponen una alternativa válida para la estimación de esta variable sin la necesidad de un sensor específico que la mida directamente. No obstante, los modelos matemáticos empleados hasta la fecha en observadores de estado para esta aplicación resultan notablemente simples. Se trata de modelos analíticos, en los que diferentes elementos del vehículo como la suspensión son notablemente simplificados o incluso ignorados. Uno de los más ensayados hasta la fecha, de hecho, es el denominado modelo bicicleta, en el que las dos ruedas de cada eje son representadas virtualmente por un único neumático, con lo que para un turismo de cuatro ruedas el modelo virtual dispone únicamente de dos. Algunos ejemplos de investigaciones a este respecto se incluyen en el apartado referencias bibliográficas más abajo.
Esto supone que los observadores de estado basados en esta solución ofrezcan estimaciones de un número muy limitado de variables (fundamentalmente, el ya citado ángulo de deriva lateral de la carrocería) , y con una precisión que ofrece un notable margen de mejora. Estas soluciones resultan suficientes para el funcionamiento de sistemas activos de chasis individuales, pero la proliferación de nuevos sistemas de actuación y la necesidad de una actuación conjunta de ellos presenta mayores requerimientos en cuanto a número y precisión de las variables estimadas.
Tanto el número de variables observadas como la precisión con que esta estimación se realiza puede ser incrementadas con la utilización de la presente invención. La presente invención emplea los modelos virtuales Multibody System Dynamics (Dinámica Multicuerpo) . Esta tipología de modelos se utiliza como herramienta independiente para la simulación virtual durante el diseño de maquinaria como robots y máquinas herramienta, así como en vehículos como automóviles y camiones. En estos modelos se definen específicamente tantos elementos mecánicos (ejes, soportes, brazos de suspensión) , uniones (casquillos, rótulas, articulaciones) y actuadores (muelles, amortiguadores, cilindros hidráulicos, motores) como se considere necesario para representar adecuadamente el funcionamiento de la máquina o vehículo a simular. Esto permite, en la etapa de diseño, anticipar y ajustar el comportamiento de la máquina antes de llegar a construir un prototipo o pasar a la serie.
Sin embargo, hasta el momento estos modelos no han sido aplicados en observadores de estado. La presente invención propone el empleo de modelos virtuales de Dinámica Multicuerpo (Multibody System Dynamics) como núcleo de un observador de estados, combinación que resulta novedosa. Dada la complejidad que pueden alcanzar estos modelos es posible observar variables muy concretas del comportamiento de la máquina a observar, a la vez que con una precisión superior a la que permiten observadores de estado basados en modelos virtuales más sencillos.
Un elemento que hasta el momento ha quedado en gran medida al margen de los observadores de estado aplicados a la automoción es el neumático. Los sistemas ESP actuales, incluso los no basados en observadores de estado, realizan una estimación muy aproximada del coeficiente de fricción disponible entre el neumático y el asfalto, para detectar situaciones de muy baja adherencia o aquéllas en las que distintos neumáticos pisan sobre superficies diferentes. Pero hasta el momento no se ha logrado una estimación suficientemente completa y precisa del comportamiento del neumático en cada instante, lo que permitiría no sólo conocer el estado actual del vehículo, sino predecir su comportamiento inmediato y desarrollar algoritmos de control de chasis mucho más efectivos.
Referencias bibliográficas T. Chung, K. Yi, "A Vehicle-Simulator-based Evaluation of Combined State Estimator and Vehicle Stability Control Algorithm". SAE Technical Paper Series, 20.
M. Hiemer, A.von Vietinghoff, U. Kiencke, "Determination of the Vehicle Body Side Slip Angle with non-linear Observer Strategies". SAE Technical Paper Series, 20.
M.A. Wilkin, D.C. Crolla, M.C. Levesley. "Design of a Robust Tyre Force Estimator Using an Extended Kalman Filter". SAE Technical Paper Series, 20.
R. Anderson, D.M. Bevly. "Estimation of Tire Cornering Stiffness Using GPS to Improve Model Based Estimation of Vehicle States". Auburn University.
L. R. Ray. "Nonlinear State and Tire Force Estimation for Advanced Vehicle Control". IEEE Transactions on Control Systems Technology, 1995.
L. R. Ray. "Real-Time Determination of Road Coefficient of Friction for IVHS and Advanced Vehicle Control". Proceedings of the American Control Conference, 1996.
K. Hug, C. Seo, J. Kim, D. Hong. "Active Steering Control Based on The Estimated Tire Forces". Proceedings of the American Control Conference, 1999.
Hans B. Pacejka, Egbert Bakker. "The Magic Formula Tyre Model".
Hans B. Pacejka. "Tire and Vehicle Dynamics".
Descripción de la invención Breve descripción de los dibujos A continuación se pasa a describir de manera muy breve una serie de dibujos que ayudan a comprender mejor la invención y que se relacionan expresamente con una realización de dicha invención que se presenta como un ejemplo no limitativo de ésta.
La Figura 1 muestra esquemáticamente el funcionamiento de un observador de estados según el estado del arte.
La Figura 2 muestra esquemáticamente el funcionamiento de un observador de estados según la presente invención.
La Figura...
Reivindicaciones:
1. Observador de estados basado en un modelo virtual de dinámica multicuerpo, comprendiendo dicho observador (9) :
- un modelo virtual de un sistema real (1) a observar, encargado de simular el comportamiento del sistema real y estimar, a partir de unas variables de entrada (6) del sistema real y unas señales de corrección (7) , unas variables de estado (5) del sistema real (1) ;
- medios de comparación (4) , configurados para comparar unas variables de salida (8) , medidas directamente en el sistema real (1) mediante sensores, con las correspondientes variables de estado (5) estimadas por el modelo virtual;
- medios de cálculo de corrección (3) , encargados de calcular las señales de corrección (7) a partir del resultado de la comparación anterior y de enviar dichas señales al modelo virtual;
caracterizado porque el modelo virtual empleado es un modelo virtual de dinámica multicuerpo (10) en el que los distintos elementos del sistema real (1) se representan como sólidos rígidos, disponiendo dicho modelo virtual de dinámica multicuerpo de medios para adaptar los sistemas de ecuaciones propios de un modelo multicuerpo al formato del espacio de estado empleado por los modelos virtuales de los observadores de estado.
2. Observador de estados según la reivindicación 1, aplicado a la observación del estado dinámico de un vehículo, caracterizado porque en el modelo virtual de dinámica multicuerpo (10) un sólido rígido representa la carrocería, y cada elemento del chasis del vehículo que tiene influencia en la dinámica del vehículo es representado por un sólido rígido, siendo las variables de entrada (6) los comandos del conductor a través de los pedales, volante y palanca de cambios, y las variables de estado (5) estimadas por el módulo virtual de dinámica multicuerpo (10) comprenden la posición y la velocidad de cada uno de los puntos empleados en el modelizado del vehículo, ángulos de la carrocería y fuerzas generadas por sus actuadores.
3. Observador de estados según cualquiera de las reivindicaciones 1-2, aplicado a la observación del estado dinámico de un vehículo, caracterizado porque el modelo virtual de dinámica multicuerpo (10) comprende los elementos mecánicos que definen los cambios de posición y orientación de los neumáticos, comprendiendo las variables de estado (5) estimadas por dicho módulo virtual de dinámica multicuerpo (10) la posición, orientación e inclinación de cada neumático.
4. Sistema activo de control de chasis de vehículos, caracterizado porque el sistema está configurado para recibir la información contenida en las variables de estado (5) estimadas por el observador de estados según la reivindicación 2, empleando dicha información para efectuar el control de los distintos elementos que componen el sistema activo de control de chasis.
5. Sistema activo de control de chasis de vehículos según reivindicación 4, caracterizado porque comprende al menos uno de los siguientes elementos de control: dirección delantera y trasera activas, suspensión y amortiguación activa, ESP y Torque Vectoring.
Patentes similares o relacionadas:
Defensa cibernética, del 15 de Enero de 2020, de Cybergym Control Ltd: Una instalación de simulación que comprende: una instalación modelo operativa de una instalación de infraestructura real que imita […]
Método para cancelar de manera adaptativa en tiempo real modos elásticos en señales discretas en el tiempo, del 4 de Septiembre de 2019, de AIRBUS DEFENCE AND SPACE, S.A.U: Método para cancelar de manera adaptativa en tiempo real N modos elásticos en señales discretas en el tiempo que miden la dinámica de una estructura flexible, teniendo la estructura […]
Generación de una configuración ejecutable, del 16 de Enero de 2019, de AVL LIST GMBH: Procedimiento para generar una configuración ejecutable en un sistema de destino, preferiblemente en un equipo de automatización para desarrollar un vehículo o […]
Monitorización de las condiciones de turbinas eólicas, del 14 de Marzo de 2018, de GENERAL ELECTRIC COMPANY: Un procedimiento para la monitorización de una turbina eólica, que comprende: definir al menos un subsistema (12, 16, 56, 66, 92, 114, 118, […]
Bloqueo y procedimiento, del 4 de Marzo de 2016, de Ineos Sales (UK) Limited: Bloqueo para su uso en un procedimiento para la desgasificación de un polvo de polímero en un recipiente de desgasificación, bloqueo que es un sistema instrumentado […]
Procedimiento para la desgasificación de polvo de polímero, del 31 de Diciembre de 2014, de Ineos Sales Limited: Un procedimiento para la producción de un polvo de polímero desgasificado, procedimiento que comprende: a) alimentar; i) un monómero principal, y ii) uno o más comonómeros […]
Métodos para determinación en línea del grado de pegajosidad de una resina utilizando un modelo para depresión de la temperatura de iniciación de la fusión, del 31 de Mayo de 2013, de UNIVATION TECHNOLOGIES LLC: Un método, que incluye los pasos de: (a) durante una reacción de polimerización en un reactor de lecho fluido que produce una resina de polímero,medir parámetros de la […]
 SISTEMA Y MÉTODO PARA LA VERIFICACIÓN AUTOMÁTICA DE RESULTADOS DE PLANIFICACIÓN, del 7 de Marzo de 2011, de ABB TECHNOLOGY AG: Sistema con un dispositivo de procesamiento de datos , que contiene - unidades de memoria para resultados de planificación para […]
SISTEMA Y MÉTODO PARA LA VERIFICACIÓN AUTOMÁTICA DE RESULTADOS DE PLANIFICACIÓN, del 7 de Marzo de 2011, de ABB TECHNOLOGY AG: Sistema con un dispositivo de procesamiento de datos , que contiene - unidades de memoria para resultados de planificación para […]