SIMULADOR DE MICROINYECCIÓN INTRACITOPLÁSMICA.
Simulador de microinyección intracitoplásmica.
Es un simulador de microinyección intracitoplásmica de espermatozoides,
diseñado para proporcionar un entorno de aprendizaje y entrenamiento para los especialistas en microinyección, el cual permite de forma adaptativa ir mejorando el manejo de los aparatos a medida que el usuario va ejercitándose, para alcanzar la sensibilidad y habilidad requerida en el entorno real.
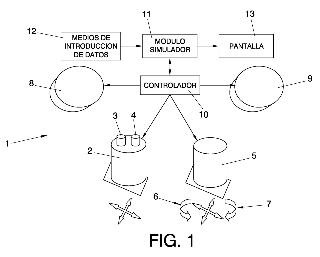
Para ello, el sistema propuesto comprende unos manipuladores (2, 3, 4, 5, 6, 7, 8, 9) con varios grados de sensibilidad, adaptables, que interactúan con un módulo de simulación de entorno (11) para proporcionar imágenes de la actividad que está siendo realizada, las cuales serán mostradas en unos medios de representación gráfica (13).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201031038.
Solicitante: UNIVERSIDAD MIGUEL HERNANDEZ DE ELCHE.
Nacionalidad solicitante: España.
Inventor/es: BOTELLA BEVIA, FEDERICO, BORRAS ROCHER,Fernando, SEGURA HERAS,José Vicente, LÓPEZ GÁLVEZ,José Jesús.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B19/00
- G09B23/28 FISICA. › G09 ENSEÑANZA; CRIPTOGRAFIA; PRESENTACION; PUBLICIDAD; PRECINTOS. › G09B MATERIAL EDUCATIVO O DE DEMOSTRACION; MEDIOS DE ENSEÑANZA O DE COMUNICACION DESTINADOS A LOS CIEGOS, SORDOS O MUDOS; MODELOS; PLANETARIOS; GLOBOS; MAPAS GEOGRAFICOS; DIAGRAMAS. › G09B 23/00 Modelos para usos científicos, médicos o matemáticos, p. ej. dispositivos a escala real para la demostración (bajo forma de juguetes A63H). › para la medicina.
Fragmento de la descripción:
Simulador de microinyección intracitoplásmica.
Objeto de la invención
La presente invención forma parte del área de la biomedicina y en particular en el campo de la medicina reproductiva.
El objeto principal de la presente invención es un simulador de microinyección intracitoplásmica de espermatozoides, proporcionando un entorno de aprendizaje y entrenamiento para los especialistas en microinyección, el cual permite de forma adaptativa ir mejorando el manejo de los aparatos a medida que el usuario va ejercitándose, para alcanzar la sensibilidad y habilidad requerida en el entorno real.
Para ello, el sistema propuesto comprende unos micromanipuladores con varios grados de sensibilidad, adaptables, que interactúan con un simulador del entorno real para proporcionar imágenes de la actividad que está siendo realizada.
Antecedentes de la invención
Se entiende por Inyección Intracitoplasmática de Espermatozoides (ICSI) la técnica de reproducción asistida para el tratamiento de la infertilidad, que consiste en la introducción de un espermatozoide dentro de un óvulo maduro.
El procedimiento de microinyección intracitoplásmica (ICSI) consiste en los siguientes pasos:
A parte de las muestras biológicas válidas, el equipamiento necesario para llevar a cabo el procedimiento ICSI consiste básicamente en un microscopio invertido con una placa calentada para un mantenimiento óptimo del material biológico, así como unos manipuladores. Estos son dos pipetas: una pipeta de sujeción, que permite realizar la fijación del óvulo en una posición determinada, y una pipeta de inyección, que permite realizar la inmovilización y captura de un espermatozoide, así como la microinyección en el óvulo. Además, son necesarios un manipulador eléctrico para grandes movimientos (pipeta de sujeción) y uno hidráulico para movimientos más finos (pipeta de inyección). También se van a necesitar jeringas herméticas rellenas con aceite mineral y una mesa antivibratoria para asegurar las condiciones idóneas de trabajo.
Dependiendo de la tarea a realizar en cada momento se trabajará a varios niveles de zoom: 40x, 20x y 10x.
Entre los problemas que presenta la formación de especialistas utilizando entornos reales se pueden citar: la frecuente rotura de pipetas y el habitual deterioro y pérdida del material biológico, así como el desgaste del entorno real.
Son conocidos múltiples tipos de simuladores entrenadores personales, como son, por ejemplo: US 2009/0263775 (Christopher J. Ullrich, Patent Department Kilpatrick Stockton LLP) 2009, ES 2 111 557 T3 (Roland Brodard, MED-EL Medical Electronics) 1998, ES 2 324 054 T3 (Johnson Chiang, Yin-Liang Lai) 2009, ES 1 065 281 (Juan Ruiz Castillo, et al) 2007.
En esos diferentes registros patentados se reflejan equipos de entrenamiento con variantes en sus funciones y en elementos constitutivos, sin embargo debe señalarse que, por parte del peticionario, se desconoce la existencia de alguno que presente las características técnicas, estructurales y de configuración semejante a las que describe el sistema objeto de la invención.
Descripción de la invención
El simulador de microinyección intracitoplásmica es un instrumento de prácticas, tanto para la primera toma de contacto y adiestramiento de especialistas para familiarizarse y controlar los movimientos y el dominio de los distintos instrumentos, como para el perfeccionamiento de gestos típicos en este tipo de actividad de especialistas y formados.
Este entorno representa una notable mejora en lo referente al coste ya que tiene la ventaja de ofrecer al usuario un método para adquirir paulatinamente la sensibilidad requerida, sin necesidad de usar horas en entorno profesional y sin riesgos como la utilización de material biológico o la rotura de pipetas. Además, este entorno es práctico, sencillo y fácilmente desmontable permitiendo su portabilidad.
El simulador para llevar a cabo la microinyección intracitoplásmica objeto de la invención debe incorporar como elementos fundamentales los siguientes:
Los actuadores requeridos son los siguientes:
Un...
Reivindicaciones:
1. Simulador para microinyección intracitoplásmica (1) caracterizado porque comprende:
2. Simulador para microinyección intracitoplásmica (1) según la reivindicación 1 caracterizado porque los actuador (2, 5) que representan movimientos en el plano de las pipetas virtuales derecha e izquierda (18, 19) respectivamente, son joysticks verticales con 360º grados de libertad.
3. Simulador para microinyección intracitoplásmica (1) según la reivindicación 1 caracterizado porque los actuadores (3, 4) que representan el movimiento de bajada y subida a lo largo del eje perpendicular al plano, respectivamente, de la pipeta virtual derecha (18), son pulsadores independientes, que transmiten un movimiento constante, y están incorporados en la parte superior del actuador (2).
4. Simulador para microinyección intracitoplásmica (1) según la reivindicación 1 caracterizado porque los actuadores (6, 7) que representan el movimiento de bajada y subida a lo largo del eje perpendicular al plano, respectivamente, de la pipeta virtual izquierda (19), son proporcionados por el giro antihorario y horario, respectivamente, del actuador (5).
5. Simulador para microinyección intracitoplásmica (1) según la reivindicación 1 caracterizado porque los actuadores (8, 9) de aspiración-expulsión de las pipetas virtuales izquierda y derecha (18, 19) respectivamente, son botones con giro infinito, que mediante el giro antihorario se aspira y mediante el giro horario se expulsa.
6. Simulador para microinyección intracitoplásmica (1) según la reivindicación 1 caracterizado porque el módulo de simulación de entorno (11) tiene una configuración que incorpora al menos los siguientes parámetros:
Patentes similares o relacionadas:
Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para la colocación de un objeto en un diente de un paciente, del 1 de Abril de 2020, de ALIGN TECHNOLOGY, INC.: Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para colocar un objeto en un diente de un […]
Combinación de un instrumento de terapia y formación de imagen, del 26 de Febrero de 2020, de ETHICON, INC.: Un instrumento combinado de terapia y formación de imágenes, comprendiendo el instrumento: una sonda de terapia para producir energía para alterar el tejido; […]
 Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Sistemas y métodos para la fabricación de una plantilla dental, del 28 de Mayo de 2019, de ALIGN TECHNOLOGY, INC.: Método para fabricación de una plantilla dental para posicionar un objeto en un diente de un paciente, que comprende: crear un modelo de diente […]
Endoscopio y dispositivo de tratamiento de accesorios integrado, del 4 de Marzo de 2019, de C.R. BARD, INC.: Endoscopio integrado que comprende un vástago que tiene extremos proximal y distal, y un dispositivo de aposición de tejido en el extremo distal […]
Microscopio quirúrgico y sensor de frente de onda integrados, del 7 de Marzo de 2018, de ALCON RESEARCH, LTD.: Un dispositivo para medir propiedades de un ojo , comprendiendo el dispositivo : un microscopio quirúrgico , un sensor de frente de […]
Fuente de alimentación para la identificación y control de herramientas quirúrgicas eléctricas, del 10 de Enero de 2018, de MICROLINE SURGICAL, INC: Un sistema para llevar a cabo cauterización térmica, que comprende: al menos un dispositivo de cauterización térmica, y una fuente de […]
Instalación para utilizar una plantilla con el fin de formar orificios para implantes en un maxilar, del 15 de Noviembre de 2017, de NOBEL BIOCARE SERVICES AG: Una instalación para formar orificios para implantes en un maxilar , comprendiendo la instalación una plantilla que se adapta a la forma […]