SIMULADOR DE EFECTOS FÍSICOS PARA TODO TIPO DE VEHÍCULOS.
Simulador de efectos físicos para todo tipo de vehículos.
El simulador se basa en la combinación de cinco movimientos,
tres lineales en correspondencia con los ejes X, Y y Z, y dos giratorios según los ejes A y B, siendo estos dos ejes de giro perpendiculares entre sí y el eje A perpendicular al eje Z. Los movimientos lineales en los ejes X e Y los realizan sendos carros 3 y 4 montados sobre correspondientes guías transversales entre sí, siendo el carro (4) portador de un soporte (5) sobre el que va montado un brazo telescópico (6) que es desplazable en sentido ascendente y descendente, según el eje Z, y que soporta al elemento (8) de giro para la horquilla (7) que a su vez constituye el medio de soporte para una cabina (9) del piloto que hace la simulación.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201131382.
Solicitante: PENDOLERO FERNANDEZ, ALFREDO.
Nacionalidad solicitante: España.
Inventor/es: PENDOLERO FERNÁNDEZ,Alfredo.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G09B9/10 FISICA. › G09 ENSEÑANZA; CRIPTOGRAFIA; PRESENTACION; PUBLICIDAD; PRECINTOS. › G09B MATERIAL EDUCATIVO O DE DEMOSTRACION; MEDIOS DE ENSEÑANZA O DE COMUNICACION DESTINADOS A LOS CIEGOS, SORDOS O MUDOS; MODELOS; PLANETARIOS; GLOBOS; MAPAS GEOGRAFICOS; DIAGRAMAS. › G09B 9/00 Simuladores para la enseñanza o el entrenamiento. › con medios de simulación de las fuerzas generadas por el vuelo o por los motores sobre el ocupante de la aeronave (G09B 9/28 tiene prioridad).
Fragmento de la descripción:
Simulador de efectos físicos para todo tipo de vehículos.
Objeto de la invención
La presente invención se refiere a un simulador de efectos físicos para todo tipo de vehículos, ya sean éstos vehículos terrestres, marítimos o aéreos.
El objeto de la invención es proporcionar un simulador basado en cinco movimientos cuya combinación proporciona una sensación real de conducción o de estar dentro del vehículo, sea éste del tipo que sea.
Antecedentes de la invención
Como es sabido, actualmente existen simuladores para todo tipo de vehículos, ya sean aéreos, marítimos o terrestres, con el fin de simular una conducción para intentar conseguir la reacción mas rápida posible cuando el conductor se encuentre en situación real.
No obstante, los simuladores, que pueden ser de accionamiento hidráulico o de cualquier otro tipo, no ofrecen ni la dinámica ni la libertad de movimientos suficientes para asemejarse a una situación real.
Descripción de la invención
El simulador que se preconiza ha sido concebido para resolver la problemática anteriormente expuesta, basándose en la combinación de cinco movimientos, tres de ellos lineales y que se corresponderán con los ejes X, Y y Z, y los otros dos movimientos giratorios que se corresponden con un eje perpendicular al eje Z y otro eje perpendicular al eje giratorio anteriormente mencionado.
Para conseguir la combinación de esos cinco movimientos, el simulador de efectos físicos aplicable a cualquier tipo de vehículo, presenta la particularidad de que sobre una base estática van montadas unas guías sobre las que es desplazable linealmente en ambos sentidos un carro, correspondiendo ese desplazamiento al eje X, con la particularidad de que sobre dicho carro van a su vez dispuestas otras guías para el desplazamiento lineal de un segundo carro, efectuándose el desplazamiento transversalmente al anterior, es decir en el sentido del eje Y.
Es decir, los dos carros se desplazan linealmente pero en sentidos perpendiculares, uno en el eje X y otro en el eje Y.
El carro superior cuenta con un soporte lateral del que emerge un brazo telescópico capaz de alargarse y acortarse en sentido vertical, es decir en el eje Z, pero siempre según un movimiento lineal, con la especial particularidad de que éste brazo telescópico constituye el medio de montaje para una cabina sobre la que se dispondrá el conductor para llevar a cabo la simulación, cabina que va montada sobre una horquilla con facultad de giro respecto del brazo telescópico, a la vez que la cabina va montada sobre la horquilla con facultad de girar sobre si misma, estableciendo dos movimientos giratorios perpendiculares entre sí, uno de ellos horizontal y el otro vertical.
De esta forma se consiguen cinco movimientos que combinadamente proporcionarán una simulación de conducción real.
Evidentemente, tanto los carros como el brazo telescópico y la horquilla soporte de la cabina y ésta última, están debidamente motorizados para llevar a cabo sus movimientos o desplazamiento, todo ello en combinación con un software adecuado y un ordenador, que permitirán reproducir al conductor las sensaciones percibidas en casi todo tipo de vehículos, siempre que estén sometidos a la fuerza de la gravedad.
Por consiguiente, mediante el simulador de efectos físicos objeto de la invención, y en base a la combinación de los cinco movimientos, tres de ellos lineales y dos giratorios, hace que el usuario del simulador llegue de verdad a creer que está conduciendo o pilotando el vehículo simulado, pudiendo añadir a la conducción simulada todas las condiciones reales de los vehículos, tales como climatología, características del terreno, etc.
Descripción de los dibujos
Para complementar la descripción que seguidamente se va a realizar y con objeto de ayudar a una mejor comprensión de las características del invento, de acuerdo con un ejemplo preferente de realización práctica del mismo, se acompaña como parte integrante de dicha descripción, un juego de dibujos en donde con carácter ilustrativo y no limitativo, se ha representado lo siguiente:
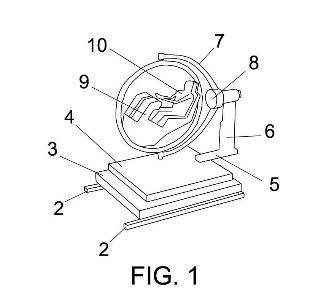
La figura 1.- Muestra una representación esquemática correspondiente a una vista en perspectiva general del simulador de efectos físicos objeto de la invención.
La figura 2.- Muestra una vista esquemática en alzado lateral del mismo simulador representado en la figura anterior.
Realización preferente de la invención
Como se puede ver en las figuras referidas, el simulador de la invención presenta la particularidad de que sobre una base fija o estática (1) se han previsto unas guías (2) sobre las que es desplazable linealmente un carro (3) accionable mediante el correspondiente motor, desplazamiento de tal carro (3) que corresponde al señalado como eje X. Sobre la parte superior de dicho carro (3) van dispuestas otras guías, perpendiculares a las anteriores, sobre las que es desplazable también linealmente un segundo carro (4), con lo que en este caso el desplazamiento lineal se realiza en sentido perpendicular al anterior, es decir en el eje Y, según se indica en los dibujos.
El carro superior (4) presenta lateralmente un soporte (5) en el que va montado un brazo telescópico (6) con facultad de desplazarse verticalmente en sentido ascendente y descendente, según el eje Z, por lo que en el conjunto hasta aquí descrito existen tres movimientos lineales, uno en el eje X, otro en el eje Y, y otro en el eje Z.
Sobre el extremo superior del brazo telescópico (6) va montada una horquilla (7) a través de un elemento (8) giratorio respecto del brazo telescópico (6), con lo que la horquilla (7) estará facultada de girar, en este caso según el eje A, que es perpendicular al eje Z.
La horquilla (7) soporta a su vez una cabina (9) en cuyo interior se sitúa el conductor (10) del vehículo, ya sea el piloto de un automóvil, ya sea el piloto de un avión, el piloto de un barco, etc., de manera que el movimiento en giro de la cabina (9) se realiza según el eje B que será perpendicular al eje A respecto del cual gira la horquilla (7) soporte de la propia cabina (9).
Por consiguiente, en el simulador propuesto se combinan cinco movimientos, tres lineales en los ejes Y, X y Z, y dos giratorios según los ejes A y B, de manera que esa combinación hace que el piloto o usuario (10) situado en la cabina (9) llega a creer realmente que está pilotando el vehículo simulado.
Los ejes cartesianos y lineales X, Y y Z, se utilizan para simulación de los momentos inerciales puntuales que impliquen aceleraciones o deceleraciones en cualquiera de dichos tres ejes o combinados, (frenadas, aceleraciones y cambios de nivel rápidos), mientras que los ejes giratorios A y B, perpendiculares entre sí y el primero de ellos perpendicular al eje Z del brazo telescópico (6), quedan sustentados sobre éste último y se rigen por coordenadas esféricas, proporcionando con su orientación, sola o coordinada, una fuerza de 1 G, natural para el piloto o pasajero, que puede trabajar conjuntamente con los tres movimientos lineales cartesianos, consiguiendo de esta forma las sensaciones absolutas del movimiento real en todas las direcciones del espacio, con diferentes gradientes de los momentos de inercia y el mantenimiento de 1 G constante en cualquier dirección. Los ejes A y B pueden girar rotaciones completas y continuadas sin limite de revoluciones.
A continuación se citan dos ejemplos de simulación.
Ejemplo 1
Piloto de un avión de combate: El piloto puede estar manejando la aeronave y realizar giros completos de mas de 360º continuos en cualquier dirección, lo que posibilita que cuando se encuentre con una situación real, sabrá reaccionar mas rápidamente, con el consiguiente aumento de seguridad para el piloto.
Ejemplo 2
Piloto de un automóvil de competición: Mediante el sistema de simulación descrito es posible recrear todas las situaciones a las que se enfrenta un piloto de automóvil de cualquier modalidad, y que se encuentre sentado en el habitáculo, de manera que al introducir la primera velocidad y acelerar, en tiempo real, según los vectores que determine el ordenador, empleando el habitáculo mediante el giro compuesto de los ejes A y B, para que el piloto quede en posición con la espalda paralela al suelo (eje Y), con lo que se tiene 1 G natural, añadiendo además el eje Z hacia arriba, con una velocidad controlada, que hace...
Reivindicaciones:
1. Simulador de efectos físicos para todo tipo de vehículos, que siendo aplicable a pilotos tanto de vehículos terrestres como marítimos y aéreos, se caracteriza porque se constituye a partir de un carro (3) desplazable linealmente sobre unas guías (2) según el eje X, sobre cuyo carro (3) se han previsto guías para el desplazamiento transversal de un segundo carro (4) desplazable igualmente de forma lineal en el eje Y, estando este segundo carro (4) dotado de un soporte lateral (5) sobre el que va montado un brazo telescópico (6) desplazable en sentido ascendente y descendente según el eje Z, siendo dicho brazo telescópico (6) un medio de montaje en giro sobre un eje A de una horquilla (7) que a su vez soporta, también en giro según el eje B, una cabina (9) para el piloto (10) simulador de la conducción, estableciendo tres movimientos lineales en los ejes X, Y y Z, y dos movimientos giratorios según los ejes A y B, de forma que la combinación de dichos cinco movimientos proporcionan una sensación de conducción real para el piloto (10).
2. Simulador de efectos físicos para todo tipo de vehículos, según reivindicación 1, caracterizado porque el eje A de giro de la horquilla (7) soporte de la cabina (9) es perpendicular al eje Z del brazo telescópico (6), mientras que el eje B de giro de la cabina (9) respecto de la horquilla (7), es perpendicular al eje A de giro para dicha horquilla (7).
3. Simulador de efectos físicos para todo tipo de vehículos, según reivindicaciones anteriores, caracterizado porque los distintos elementos móviles constituidos por los carros (3 y 4) desplazables linealmente, como el brazo telescópico (6) desplazable igualmente de forma lineal y la horquilla (7) y cabina (9) con movimientos giratorios, son accionados por distintos motores para conseguir los movimientos lineales y giratorio referidos.
4. Simulador de efectos físicos para todo tipo de vehículos, según reivindicaciones anteriores, caracterizado porque se incluye un software adecuado y un ordenador para permitir llevar a cabo la combinación de los movimientos y conseguir la reproducción de las sensaciones percibidas en la simulación de conducción de todo tipo de vehículo en el que se aplique el propio simulador.
Patentes similares o relacionadas:
Simulador de vuelo, sistema para adoptar todas las posiciones gravitatorias posibles, del 27 de Mayo de 2016, de BENITO YGUALADOR, Fco. Javier: Simulador de vuelo, sistema para adoptar todas las posturas gravitatorias posibles. Simulador de vuelo realizado a base de unos conjuntos de aros que giran sobre […]