SENSOR ANGULAR.
Unidad de sensor que está adaptada para detectar un ángulo de giro de un elemento giratorio que está incluido en la unidad de sensor,
comprendiendo la unidad de sensor:
un par de imanes permanentes (4, 5) que están dispuestos de manera que los polos opuestos (N, S) quedan unos enfrente de los otros con sus respectivas superficies frontales (11, 12) a una distancia para proporcionar un espacio entre estas superficies frontales, y que pueden girar respecto a una unidad de detección de flujo (10) alrededor de una línea central (A), estando dispuesta la unidad de detección de flujo (10) dentro de dicho espacio y estando configurada para detectar el flujo en el espacio para proporcionar una señal eléctrica que indica el ángulo de giro del elemento giratorio, presentando las superficies frontales (11, 12) de los imanes permanentes (4, 5) una forma curva, y presentando los imanes permanentes cada uno una superficie posterior (13, 14) opuesta a sus superficies frontales (11, 12), caracterizada por el hecho de que las superficies posteriores (13, 14) de los imanes permanentes (4, 5) presentan forma plana y son paralelas entre sí.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP2001/006043.
Solicitante: KAYABA INDUSTRY CO., LTD..
Nacionalidad solicitante: Japón.
Dirección: WORLD TRADE CENTER BLDG, 2-4-1, HAMAMATSU-CHO MINATO-KU, TOKYO 105-6190 JAPON.
Inventor/es: OOKI,Norikazu, SUGIHARA,Katsumichi, MAEHARA,Hideo.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B7/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › Disposiciones de medida caracterizadas por la utilización de medios eléctricos o magnéticos.
- G01B7/30 G01B […] › G01B 7/00 Disposiciones de medida caracterizadas por la utilización de medios eléctricos o magnéticos. › para la medida de ángulos o conicidades; para ensayar la alineación de ejes.
- G01D5/14 G01 […] › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que influyen en la magnitud de una corriente o voltaje.
PDF original: ES-2375932_T3.pdf
Fragmento de la descripción:
Sensor angular [0001] Esta invención se refiere a un sensor de acuerdo con el preámbulo de la reivindicación independiente 1.
De CA-A1 232 957 se conoce un sensor tal como se ha indicado anteriormente.
En el estado de la técnica, un sensor de ángulo de giro comprende unos imanes permanentes 4, 5 que giran entre sí alrededor de un eje de giro A, y una unidad de detección de densidad de flujo 10 que permanece fija respecto a estos imanes tal como se muestra en la figura 8. En los imanes permanentes 4, 5 unos polos distintos queda dispuestos unos frente a otros, colocados simétricos alrededor de la línea central de giro A. La unidad de detección de densidad de flujo 10 queda dispuesta entre los imanes permanentes 4, 5.
La unidad de detección de densidad de flujo 10 puede ser por ejemplo un elemento Hall que emita una tensión de acuerdo con la densidad de flujo que varía según el giro relativo de los imanes permanentes 4, 5.
En este tipo de sensor de ángulo de giro de la técnica anterior, la forma en sección transversal de los imanes permanentes 4, 5 es cuadrada y sus caras opuestas son paralelas, de modo que la densidad de flujo distribuido entre los imanes permanentes 4, 5 aumenta hacia una línea central del imán B, tal como se muestra en la figura 5. La variación de la salida de la unidad de detección de densidad de flujo 10 no sólo depende de la variación del ángulo de entrada del flujo sino también de las posiciones relativas de los imanes permanentes 4, 5, es decir, del desplazamiento desde la línea central del imán B. Por lo tanto, las características de salida de la unidad de detección de densidad de flujo 10 no son lineales, sino no lineales respecto al desplazamiento, tal como se muestra en la figura 9, lo cual da lugar a un error de detección.
Por lo tanto, un objetivo de la presente invención es disponer un sensor tal como se ha indicado anteriormente tal que permita un rendimiento de salida de alta precisión sin aumentar los costes.
El objetivo se consigue de acuerdo con la presente invención mediante un sensor para detectar un ángulo de giro como una señal eléctrica que comprende: unos imanes permanentes cuyos polos opuestos quedan dispuestos unos frente a los otros, y una unidad de detección de densidad de flujo que realiza un giro relativo entre los imanes permanentes, en el que las superficies de los polos opuestos de los imanes permanentes presentan una forma curvada, en el que las superficies de los polos opuestos de los imanes permanentes que no están unas frente a las otras quedan dispuestas paralelas a una línea central del imán o perpendiculares a ésta.
En esta invención, es preferible que las superficies de los polos magnéticos opuestos de los imanes permanentes sean huecas para formar depresiones cóncavas. Alternativamente, las superficies de los polos magnéticos opuestos de los imanes permanentes pueden sobresalir hacia afuera para formar superficies convexas.
En esta invención, puede disponerse un par de elementos Hall en cada lado del eje de giro de la unidad de detección de densidad de flujo.
De acuerdo con esta invención, formando las superficies de los polos magnéticos opuestos de los imanes permanentes en forma de curva, la densidad de flujo entre los imanes permanentes puede distribuirse de cualquier manera deseada, sin necesidad de utilizar materiales costosos para los imanes permanentes, y puede obtenerse la alta precisión de detección requerida.
De acuerdo con esta invención, puede hacerse que la densidad de flujo entre los imanes permanentes sea uniforme y puede hacerse que la resolución de salida del sensor sea constante sin utilizar materiales costosos para los imanes permanentes.
De acuerdo con esta invención, la densidad de flujo entre los imanes permanentes puede concentrarse en las proximidades de la línea central del imán, puede configurarse una zona de alta resolución en la que la salida del sensor varía mucho respecto al desplazamiento de la unidad de detección de densidad de flujo, y puede aumentarse la precisión de detección del sensor de ángulo de giro.
Además, de acuerdo con la presente invención, los elementos Hall no quedan dispuestos en la línea central de giro, de modo que puede obtenerse una distribución de densidad de flujo adecuada y la tensión de salida de los elementos Hall puede extraerse sin ningún error.
Otras realizaciones preferidas de la presente invención se establecen en las otras reivindicaciones dependientes. En adelante, la presente invención se explica con mayor detalle mediante varias realizaciones de la misma en combinación con los dibujos que se acompañan, en los cuales:
La figura 1 es una vista en planta de un sensor de ángulo de giro que muestra una realización de esta invención.
La figura 2 es una vista lateral del sensor de ángulo de giro.
La figura 3 es una vista en planta que muestra una ampliación de un imán permanente.
La figura 4 es una gráfica que muestra las características de salida del sensor de ángulo de giro.
La figura 5 es un diagrama descriptivo que muestra la distribución de la densidad de flujo del sensor de ángulo de giro.
La figura 6 es una vista en planta que muestra una ampliación de un imán permanente en otra realización de esta invención.
La figura 7 es una gráfica que muestra las características de salida del sensor de ángulo de giro.
La figura 8 es una vista en planta de un imán permanente de un sensor de ángulo de giro de acuerdo con la técnica anterior.
La figura 9 es una gráfica que muestra las características de salida de este sensor.
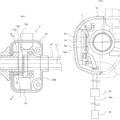
En primer lugar, la figura 1 y la figura 2 muestran un ejemplo de un sensor de ángulo de giro que puede aplicarse a esta invención.
Este sensor de ángulo de giro comprende una carcasa 1 y un eje de giro 2 que giran entre sí, y un par de elementos Hall 7, 8 quedan fijos a un elemento de soporte 6 unido a la carcasa 1. Un par de imanes permanentes 4, 5 quedan fijos a un rotor 3 unido al eje de giro 2. Cuando el eje de giro 2 gira, los imanes permanentes 4, 5 giran junto con el rotor 3.
Los imanes permanentes 4, 5 tienen sus polos opuestos uno frente al otro en el rotor 3, y están dispuestos simétricamente alrededor de una línea central de giro A de un eje de giro 2. Los elementos Hall 7, 8 también están dispuestos simétricamente alrededor de la línea central de giro A, y quedan interpuestos entre los imanes permanentes 4, 5.
Los elementos Hall 7, 8, que comprenden la unidad de detección de densidad de flujo 10, envían una tensión como señal eléctrica a través de un cable 9 a medida que varía la densidad de flujo según el giro relativo de los imanes permanentes 4, 5.
En la presente invención, las superficies de los polos magnéticos 11, 12 de los imanes permanentes 4, 5 presenta una forma curva de modo que la densidad de flujo entre los imanes permanentes 4, 5 se distribuye adecuadamente.
La figura 3 es una vista en planta de los imanes permanentes 4, 5 vistos desde la dirección del eje de giro. Las superficies de los polos magnéticos opuestos 11, 12 de los imanes permanentes 4, 5 presentan una forma hueca curva en la figura 3. Por otra parte, las superficies de los polos magnéticos 13, 14 de los imanes permanentes 4, 5 que no quedan unos frente a los otros presentan una forma plana. Por lo tanto, la superficie de la sección transversal en la dirección del polo magnético de los imanes permanentes 4, 5 disminuye hacia la línea central del imán B. De este modo, la curvatura de las superficies de los polos magnéticos 11, 12 puede ser establecerse de manera arbitraria, y puede hacerse que la densidad de flujo entre los imanes permanentes 4, 5 sea uniforme.
En la configuración anterior, la distancia entre las superficies de los polos magnéticos 11, 12 formadas huecas aumenta hacia la línea central del imán B, de modo que estableciendo adecuadamente la curvatura de las superficies de los polos magnéticos 11, 12 puede hacerse que la densidad de flujo generado entre los imanes permanentes 4, 5 sea uniforme, tal como se muestra en la figura 5. De este modo, al hacer que la distribución de la densidad de flujo que pasa por la unidad de detección de densidad de flujo 10 sea uniforme, la variación de la salida de la unidad de detección de densidad de flujo 10 sólo depende de la... [Seguir leyendo]
Reivindicaciones:
1. Unidad de sensor que está adaptada para detectar un ángulo de giro de un elemento giratorio que está incluido en la unidad de sensor, comprendiendo la unidad de sensor:
un par de imanes permanentes (4, 5) que están dispuestos de manera que los polos opuestos (N, S) quedan unos enfrente de los otros con sus respectivas superficies frontales (11, 12) a una distancia para proporcionar un espacio entre estas superficies frontales, y que pueden girar respecto a una unidad de detección de flujo (10) alrededor de una línea central (A) , estando dispuesta la unidad de detección de flujo (10) dentro de dicho espacio y estando configurada para detectar el flujo en el espacio para proporcionar una señal eléctrica que indica el ángulo de giro del elemento giratorio, presentando las superficies frontales (11, 12) de los imanes permanentes (4, 5) una forma curva, y presentando los imanes permanentes cada uno una superficie posterior (13, 14) opuesta a sus superficies frontales (11, 12) , caracterizada por el hecho de que las superficies posteriores (13, 14) de los imanes permanentes (4, 5) presentan forma plana y son paralelas entre sí.
2. Unidad de sensor según la reivindicación 1, caracterizada por el hecho de que las superficies frontales (11, 12) de los imanes permanentes (4, 5) presentan una forma cóncava o una forma convexa.
3. Unidad de sensor según la reivindicación 1 o 2, caracterizada por el hecho de que el elemento giratorio comprende un par de elementos Hall (7, 8) para detectar el flujo.
Patentes similares o relacionadas:
 Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
Dispositivo de detección de posición relativa, sensor de posición del acelerador y vehículo, del 29 de Enero de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de detección de posición relativa que comprende una parte de imán permanente y un sensor magnético que están dispuestos para ser desplazables […]
SISTEMA SENSOR DE POSICION, del 22 de Enero de 2020, de PIHER SENSORS & CONTROLS, S.A: 1. Sistema sensor de posición de tipo inductivo para motores, comprendiendo el sistema sensor un sensor que comprende una bobina inductora y una bobina pasiva, […]
Aparato de detección de la posición del polo magnético para máquinas síncronas, del 3 de Abril de 2019, de MITSUBISHI ELECTRIC CORPORATION: Un aparato de detección de la posición del polo magnético para máquinas síncronas, que comprende: - un medio de circuito , para convertir […]
Dispositivo de detección de ángulo de rotación absoluto de múltiples vueltas y método para la detección de ángulo de rotación absoluto, del 31 de Mayo de 2017, de Oriental Motor Co., Ltd: Un aparato de detección de ángulo de rotación de múltiples vueltas que comprende: un engranaje de árbol motor (10b) montado sobre un árbol motor (10a); un primer […]
Dispositivo para detectar ángulos de rotación absolutos de rotación múltiple y método para detectar su ángulo de rotación, del 8 de Marzo de 2017, de Oriental Motor Co., Ltd: Un dispositivo de detección de ángulo de rotación para detectar un ángulo de rotación absoluto de un primer árbol giratorio , que comprende: […]
Dispositivo para detectar ángulos de rotación absolutos de rotación múltiple, y método para detectar los mismos, del 19 de Octubre de 2016, de Oriental Motor Co., Ltd: Un dispositivo para calcular un ángulo de rotación absoluto de rotación múltiple, que comprende: un mecanismo de transmisión adaptado para transmitir una revolución […]
Dispositivo para detectar el ángulo de rotación de un eje de dirección, del 10 de Agosto de 2016, de KAYABA INDUSTRY CO., LTD.: Dispositivo de deteccion del angulo de rotacion del eje de direccion que detecta un angulo de rotacion de un eje de direccion que gira al accionar […]
 Captador de posición absoluto y multi-periódico, del 1 de Febrero de 2016, de Moving Magnet Technologies (MMT): Captador magnético de posición (A), que incluye al menos una unidad imantada , una primera sonda magnetosensible y una segunda sonda […]
Captador de posición absoluto y multi-periódico, del 1 de Febrero de 2016, de Moving Magnet Technologies (MMT): Captador magnético de posición (A), que incluye al menos una unidad imantada , una primera sonda magnetosensible y una segunda sonda […]