Procedimiento y sistema de generación de un recorrido para una broncoscopia virtual.
Procedimiento y sistema de generación de un recorrido para una broncoscopia virtual,
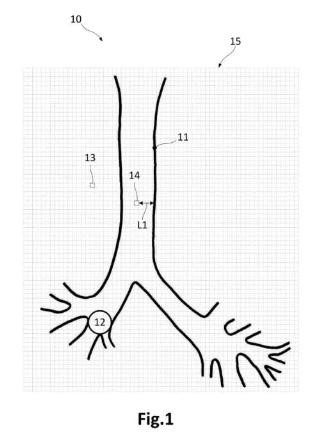
que comprende generar un modelo de un árbol traqueo-bronquial y un modelo de un broncoscopio. El modelo del árbol traqueo-bronquial comprende una representación de las paredes del árbol y de una zona objetivo. El modelo del broncoscopio comprende una representación de un extremo visor (punta) del broncoscopio mediante una cadena cinemática de cuerpos rígidos articulados entre sí. Los cuerpos rígidos comprenden al menos una base y un cuerpo visor. La rotación de las articulaciones representa un movimiento de flexión de la punta. El procedimiento comprende además calcular una secuencia de desplazamientos de la cadena que conduzca el cuerpo visor hacia el objetivo sin que ninguno de los cuerpos rígidos sobrepase las paredes del árbol traqueo-bronquial, siendo calculado cada tramo aplicando al menos un valor de rotación de las articulaciones de la cadena y un movimiento de avance de la cadena.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201230732.
G06F3/01FISICA. › G06CALCULO; CONTEO. › G06F PROCESAMIENTO ELECTRICO DE DATOS DIGITALES (sistemas de computadores basados en modelos de cálculo específicos G06N). › G06F 3/00 Disposiciones de entrada para la transferencia de datos destinados a ser procesados en una forma utilizable por el computador; Disposiciones de salida para la transferencia de datos desde la unidad de procesamiento a la unidad de salida, p. ej. disposiciones de interfaz. › Disposiciones de entrada o disposiciones combinadas de entrada y salida para la interacción entre el usuario y el computador (G06F 3/16 tiene prioridad).
G06T17/10G06 […] › G06TTRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › G06T 17/00 modelado 3D mediante gráficos de computdor. › Descripción de volumen, p. ej. cilindros, cubos o utilizando CSG [Geometría Constructiva del Sólido].
Fragmento de la descripción:
5 PROCEDIMIENTO Y SISTEMA DE GENERACiÓN DE UN RECORRIDO PARA UNA BRONCOSCOPIA VIRTUAL DESCRIPCiÓN La presente invención se refiere a un procedimiento de generación de un recorrido para una broncoscopia virtual teniendo en cuenta un determinado modelo tridimensional de un árbol traqueo-bronquial y un determinado modelo tridimensional de un broncoscopio. 10 La presente invención se refiere también a un programa informático y un sistema adecuados para llevar a cabo este procedimiento de generación de un recorrido para una broncoscopia virtual. 15 ESTADO DE LA TÉCNICA ANTERIOR El diagnóstico de cáncer de pulmón requiere normalmente la realización de broncoscopias para la biopsia de lesiones identificadas mediante radiografías de pecho o tomografías computarizadas de tórax, aunque en el caso de lesiones pulmonares periféricas pequeñas pueden usarse citologías o biopsias percutáneas por aspiración mediante agujas. Estas técnicas tienen un ratio de éxito elevado pero presentan un cierto riesgo de neumotórax, entre otros 20 inconvenientes. Por consiguiente, las biopsias transbronquiales usando broncoscopios ultrafinos están resultando una buena alternativa dado que estos broncoscopios pueden ser insertados bajo visión directa en bronquios más periféricos que los broncoscopios tradicionales. La identificación de los caminos a través de bronquios accesibles para alcanzar lesiones pulmonares pequeñas es, sin embargo, compleja durante un tiempo de exploración limitado, y por tanto la aplicación de broncoscopias virtuales puede ser de gran ayuda [N. Shinagawa, K. Yamazaki, Y. 25 Onodera, K. Miyasaka, E. Kikuehi, H. Dosaka-Akita, and M. Nishimura, "CT-guided transbronehial biopsy using an ultrathin bronehoseope with virtual bronehoseopie navigation, " CHEST, vol. 125, no. 3, pp. 1138-1143, 2004]. Una broncoscopia virtual es una técnica de reconstrucción tridimensional generada por computador que permite a los médicos o personal sanitario explorar el árbol traqueo-bronquial como ayuda para localizar la zona enferma (por 30 ejemplo haciendo que el tubo bronquial virtual sea semi-transparente con el fin de que el nodo linfático sea visible) , evaluar si es necesario realizar la broncoscopia real y planificar automáticamente un recorrido dentro del modelo tridimensional [J. Ferguson and G. MeLennan, "Virtual bronehoseopy, " Proeeedings of American Thoraeie Soeiety, vol. 2, pp. 488-491, 2005]. Uno de los puntos débiles de los sistemas de broncoscopia virtual actuales es que sólo ofrecen la posibilidad de una exploración mediante una cámara que pasa a través de puntos pre-calculados, que es 35 controlada mediante un teclado o un mouse, por lo que las limitaciones geométricas y cinemáticas del broncoscopio son ignoradas. En consecuencia, por un lado no hay una correspondencia entre los movimientos reales que el médico realizaría con un broncoscopio real, y por otro lado no se proporciona información sobre si una lesión periférica puede ser alcanzada efectivamente con un determinado broncoscopio, o sobre cual sería el punto más cercano a dicha lesión que puede ser alcanzado. 40 La planificación de movimientos para una broncoscopia virtual ha sido, hasta este momento, concebida sólo en el contexto de animaciones navegables, es decir para encontrar un recorrido de una cámara representada por un punto desde la tráquea hasta una región objetivo ignorando las restricciones geométricas y cinemáticas del broncoscopio. Kiraly et al. [A. P. Kiraly, J. Helferty, E. Hoffman, G. MeLennan, and W Higgins, 'Three-dimensional path planning for 45 virtual bronehoseopy, " IEEE Trans Med Imaging, vol. 23, pp. 1365-1379, 2004J construyeron un esqueleto a partir de imágenes de tomografía computarizada segmentadas y lo mejoraron eliminando ramificaciones falsas y realizando un proceso de centrado de las ramificaciones, realizando una interpolación de sub-vóxeles mediante funciones spline, y finalmente derivando las direcciones de visión (o exploración) . Un enfoque similar pero más simple fue divulgado en la publicación [M. Negahdar, A. Ahmadian, N. Navab, and K. Firouznia, "Path planning for virtual 50 bronehoseopy, " in Proe. ofthe 28th IEEE EMBS Annuallnf. Cont., 2006, pp. 156-159]. Un broncoscopio (o videobroncoscopio) es un tubo largo, fino y flexible acoplado a una cámara CCD. Algunos autores en el campo de planificación de recorridos se han enfrentado con el problema de planificar recorridos para objetos lineales deformables, como por ejemplo Mol! and Kavraki [M. Mol! and L. Kavraki, "Path planning for 55 deformable linear objeets, " IEEE Trans. Roboties, vol. 22, no. 4, p. 625636, 2006J en el contexto de la planificación de sutura quirúrgica, o Gayle et al. [R. Gayle, P. Segars, M. Un, and D. Manoeha, "Path planning for deformable robots in eomplex environments, " in In Roboties: Systems and Seienee, 2005J en el contexto de la planificación de recorridos de catéteres en quimioembolización hepática enfocando el problema como un problema de simulación dinámica restringida. Este último enfoque tiene en cuenta la geometría del catéter de forma limitada aunque no 60 considera las restricciones cinemáticas del mismo, por lo que su aplicación a broncoscopios podría ser factible aunque con ciertas complejidades relevantes y, por supuesto, con las limitaciones/restricciones mencionadas. El movimiento de la cámara acoplada en la punta del broncoscopio tiene tres grados de libertad (la rotación alrededor del eje del tubo, el avance a lo largo de éste y la flexión de la punta) y está afectado por restricciones no holonómicas. Restricciones de movimiento similares se encuentran en la planificación de movimientos de agujas de gran flexibilidad y de punta biselada que se mueven a lo largo de trayectorias curvas en el tejido cuando se aplica 5 una fuerza de empuje hacia adelante. En relación a este problema, Lobaton et al. [S. P. E. Lobaton, J. Zhang and R. Alterovitz, "Planning eurvature eonstrained paths to multiple goals using eirele sampling, " in Proe. of the IEEE Inf. Conf. on Roboties and Aut., 2011, pp. 1463 -1469J construyó un mapa de carreteras probabilístico mediante el muestreo de círculos de curvatura constante y generando transiciones factibles entre los círculos del muestreo con una fórmula de forma cerrada para espacios de trabajo bidimensionales y tridimensionales, y Patil y Alterovitz [S. 10 Patil and R. Alterovitz, "Interaetive motion planning for steerable needles in 3d environments with obstaeles, " in Proe. ofthe IEEE RAS/EMBS Inf. Conf. on Biomedieal Roboties and Biomeehatronies, 2010, pp. 893-899J propusieron un árbol aleatorio de exploración rápida con una heurística de muestreo guiado de accesibilidad adaptada a dicho problema, estando esta heurística de muestreo descrita en el documento [A. Shkolnik, M. Walter, and R. Tedrake, "Reaehability-guided sampling for planning under differential eonstraints, " in Proe. of the IEEE Int. Conf. on Roboties 15 and Automation, 2009, pp. 4387-4393]. Esta última propuesta podría ser adaptada para broncoscopios (con el fin de tener en cuenta que el área de trabajo para la broncoscopia es el árbol traqueobronquial, que es un espacio muy limitado sin obstáculos) , usando por ejemplo algunos enfoques basados en árboles aleatorios de exploración rápida como los siguientes: [A. Yershova and S. M. Lavalle, "Motion planning for highly eonstrained spaees, " Conneet, vol. 396, pp. 297-306, 2009J Y [O. Berenson, T Simeon, and S. Srinivasa, "Addressing eost-spaee ehasms in 20 manipulation planning, " in Proe. of the IEEE Inf. Conf. on Roboties and Automation, 2011, pp. 4561 -4568]. No obstante, estas adaptaciones podrían ser de aplicación bastante compleja dadas las particularidades asociadas con las broncoscopias. 25 EXPLICACiÓN DE LA INVENCiÓN 30 Por lo tanto, aún existe la necesidad de nuevos procedimientos, programas informáticos y sistemas de planificación de un recorrido para una broncoscopia virtual que solucionen al menos alguno de los problemas antes mencionados. Es un objetivo de la presente invención satisfacer dicha necesidad. En un primer aspecto, la invención proporciona un procedimiento de generación de un recorrido para una broncoscopia virtual, que comprende generar un modelo tridimensional de un árbol traqueo-bronquial y generar un modelo tridimensional de un broncoscopio. El modelo tridimensional del árbol traqueo-bronquial comprende una representación de las paredes del árbol traqueo-bronquial y una representación de una zona objetivo. El modelo 35 tridimensional del broncoscopio comprende una representación de una punta de un tubo visor del broncoscopio mediante una cadena cinemática de cuerpos rígidos con dimensiones predefinidas y conectados entre sí mediante articulaciones de un grado de libertad de rotación. Los cuerpos rígidos comprenden al menos un cuerpo base que representa...
Reivindicaciones:
1. Procedimiento de generación de un recorrido para una broncoscopia virtual, que comprende: generar un modelo tridimensional de un árbol traqueo-bronquial, comprendiendo dicho modelo una 5 representación de las paredes del árbol traqueo-bronquial y una representación de una zona objetivo; generar un modelo tridimensional de un broncoscopio, comprendiendo dicho modelo una representación de una punta de un tubo visor del broncoscopio mediante una cadena cinemática de cuerpos rígidos con dimensiones predefinidas y conectados entre si mediante articulaciones de un grado de libertad de rotación, comprendiendo los cuerpos rígidos al menos un cuerpo base que representa la base de la punta y un cuerpo visor que representa el 10 extremo visor de la punta, y representando dicha rotación de las articulaciones, exceptuando la del cuerpo base, un movimiento de flexión de la punta; calcular una secuencia de tramos de desplazamiento de la cadena cinemática que conduzca el cuerpo visor hacia la zona objetivo sin que ninguno de los cuerpos de la cadena sobrepase las paredes del árbol traqueo-bronquial, siendo calculado cada tramo de desplazamiento mediante la aplicación de al menos un valor de rotación 15 de las articulaciones de la cadena y un movimiento de avance de la cadena una vez aplicado dicho valor de rotación. 2. Procedimiento según la reivindicación 1, en el que la rotación de las articulaciones está limitada a unos ángulos máximo y mínimo predefinidos de rotación de las articulaciones. 20 3. Procedimiento según una cualquiera de las reivindicaciones 1 ó 2, en el que cada cálculo de cada tramo de desplazamiento de la cadena cinemática comprende: determinar un conjunto de tramos de desplazamiento candidatos, siendo calculado cada tramo de desplazamiento candidato mediante la aplicación de al menos un valor candidato de rotación de las articulaciones de la cadena y un movimiento candidato de avance de la cadena una vez aplicado dicho valor candidato de rotación; 25· calcular un coste asociado a cada uno de los tramos de desplazamiento candidatos a partir del cálculo de un coste relativo a la reducción de la distancia entre el cuerpo visor y la zona objetivo que produciría dicho tramo de desplazamiento candidato, siendo menor dicho coste relativo cuanto mayor sea dicha reducción; 30 determinar el menor de dichos costes calculados asociados a los tramos de desplazamiento candidatos; seleccionar el tramo de desplazamiento candidato asociado a dicho coste calculado menor. 4. Procedimiento según la reivindicación 3, en el que calcular el coste asociado a cada uno de los tramos de desplazamiento candidatos comprende además: calcular un coste relativo al aumento de la distancia entre el cuerpo visor y las paredes del árbol traqueo-bronquial que produciría dicho tramo de desplazamiento candidato, siendo menor dicho coste relativo cuanto mayor 35 sea dicho aumento. 5. Procedimiento según una cualquiera de las reivindicaciones 3 ó 4, en el que el cálculo de cada tramo de desplazamiento candidato comprende además, antes de la aplicación del movimiento candidato de avance, la aplicación de un movimiento candidato de rotación del cuerpo base con respecto a un eje longitudinal de este cuerpo 40 base, representando dicha rotación del cuerpo base un movimiento de torsión de la punta; y en el que calcular el coste asociado a cada uno de los tramos de desplazamiento candidatos comprende además: calcular un coste relativo al movimiento candidato de rotación del cuerpo base, siendo menor dicho coste relativo cuanto menor sea dicha rotación en valor absoluto y con respecto al movimiento precedente. 45 6. Procedimiento según la reivindicación 5, en el que la rotación del cuerpo base está limitado a unos ángulos máximo y mínimo predefinidos de rotación del cuerpo base. 7. Procedimiento según una cualquiera de las reivindicaciones 3 a 6, en el que calcular el coste asociado a cada uno de los tramos de desplazamiento candidatos comprende además: 50· calcular un coste relativo al aumento de la centralidad del cuerpo visor con respecto a la cavidad sustancialmente tubular conformada por las paredes del árbol traqueo-bronquial, siendo menor dicho coste relativo cuanto mayor sea dicho aumento. 8. Procedimiento según una cualquiera de las reivindicaciones 3 a 7, en el que cada coste relativo tiene asociado un 55 peso; y 60 en el que calcular el coste asociado a cada uno de los tramos de desplazamiento candidatos comprende además: aplicar a cada coste relativo calculado su peso asociado. 9. Procedimiento según la reivindicación 8, en el que cada peso asociado a un coste relativo es parametrizable. 10. Procedimiento según una cualquiera de las reivindicaciones 2 a 9, en el que cada cálculo de cada tramo de desplazamiento de la cadena cinemática comprende además: reducir el tramo de desplazamiento candidato seleccionado descartando una parte final del tramo. 11. Procedimiento según la reivindicación 10, en el que la parte final del tramo descartada es un porcentaje predefinido del tramo. 5 12. Procedimiento según una cualquiera de las reivindicaciones 3 a 11, en el que determinar el conjunto de tramos de desplazamiento candidatos comprende, para cada uno de dichos tramos de desplazamiento candidatos: verificar si el tramo de desplazamiento candidato causa al menos una colisión de la cadena cinemática con alguna de las paredes del árbol traqueo-bronquial; realizar, para cada colisión detectada, una simulación dinámica de la colisión y ajustar el tramo de 10 desplazamiento candidato según el resultado de esta simulación. 13. Procedimiento según la reivindicación 12, en el que la simulación dinámica de esta colisión es realizada mediante el uso de la librería OPEN DYNAMICS ENGINE. 15 14. Procedimiento según una cualquiera de las reivindicaciones anteriores, que comprende además: recibir una o más señales procedentes de un dispositivo de usuario, causando dichas señales recibidas la obtención de una sucesión de uno o más tramos de desplazamiento de la cadena cinemática forzados por un usuario; y en el que calcular la secuencia de tramos de desplazamiento de la cadena cinemática comprende, para cada tramo 20 de desplazamiento forzado por el usuario, ajustar dicho cálculo tomando como punto de partida este tramo de desplazamiento forzado por el usuario. 15. Procedimiento según la reivindicación 14, que comprende además: generar, para cada tramo de desplazamiento forzado por el usuario, al menos una señal háptica representativa 25 del desplazamiento de la cadena cinemática entre las paredes del árbol traqueo-bronquial; enviar cada una de las señales hápticas generadas a un dispositivo háptico de usuario para su transmisión a dicho usuario. 16. Procedimiento para verificar en una broncoscopia virtual si un modelo de broncoscopio puede alcanzar una zona 30 objetivo representada en un modelo de árbol traqueo-bronquial, que comprende: realizar el procedimiento de generación de un recorrido para una broncoscopia virtual según una cualquiera de las reivindicaciones 1 a 15, teniendo en cuenta este modelo de broncoscopio y este modelo de árbol traqueo-bronquial junto con su representación de la zona objetivo; verificar si el recorrido generado alcanza la zona objetivo y, en caso de resultado positivo de dicha verificación, 35 generar al menos una señal indicando que el modelo de broncoscopio sí puede alcanzar la zona objetivo. 17. Programa informático que comprende instrucciones de programa para provocar que un sistema de computación realice el procedimiento según una cualquiera de las reivindicaciones 1 a 16. 40 18. Programa informático según la reivindicación 17, que está almacenado en unos medios de grabación. 19. Programa informático según la reivindicación 17, que es portado por una señal portadora. 20. Sistema para la generación de un recorrido para una broncoscopia virtual, que comprende: 45· medios de computación para generar un modelo tridimensional de un árbol traqueo-bronquial, comprendiendo dicho modelo una representación de las paredes del árbol traqueo-bronquial y una representación de una zona objetivo; medios de computación para generar un modelo tridimensional de un broncoscopio, comprendiendo dicho modelo una representación de una punta de un tubo visor del broncoscopio mediante una cadena cinemática de 50 cuerpos rígidos con dimensiones predefinidas y conectados entre si mediante articulaciones de un grado de libertad de rotación, comprendiendo los cuerpos rígidos al menos un cuerpo base que representa la base de la punta y un cuerpo visor que representa el extremo visor de la punta, y representando dicha rotación de las articulaciones, exceptuando la del cuerpo base, un movimiento de flexión de la punta; medios de computación para calcular una secuencia de tramos de desplazamiento de la cadena cinemática que 55 conduzca el cuerpo visor hacia la zona objetivo sin que ninguno de los cuerpos de la cadena sobrepase las paredes del árbol traqueo-bronquial, siendo calculado cada tramo de desplazamiento mediante la aplicación de al menos un valor de rotación de las articulaciones de la cadena y un movimiento de avance de la cadena una vez aplicado dicho valor de rotación. 60 21. Sistema para la generación de un recorrido para una broncoscopia virtual, que comprende un procesador y una memoria; en el que la memoria está adaptada para almacenar instrucciones de ordenador ejecutables que, cuando son ejecutadas por el procesador, causan la realización del procedimiento según una cualquiera de las reivindicaciones 1 a 16.
Patentes similares o relacionadas:
Método y sistema para generar datos de modelo de prenda, del 6 de Noviembre de 2019, de Reactive Reality GmbH: Un método para generar datos de modelo de prenda representativos de una pieza de prenda, comprendiendo el método
- procesar datos de imagen de entrada que […]
Método implementado por ordenador para acortar digitalmente una tapa de un puente dental y un medio legible por ordenador, del 4 de Septiembre de 2019, de STRAUMANN HOLDING AG: Método implementado por ordenador para acortar digitalmente una tapa de un puente dental, comprendiendo el método las etapas de:
(a) cargar datos tridimensionales […]
Método de fabricación de un disipador térmico poroso para dispositivos electrónicos, del 27 de Septiembre de 2016, de UNIVERSITAT POLITECNICA DE CATALUNYA: Método de fabricación de un disipador térmico poroso para dispositivos electrónicos utilizando técnicas computacionales de diseño asistido por ordenador basadas en un método […]
Método de producción estereolitográfica y de diseño gráfico informatizado de un objeto tridimensional mejorado, del 20 de Enero de 2016, de Dws S.R.L: Método de producción de un objeto tridimensional que comprende una pluralidad de soportes que están conectados al cuerpo de dicho objeto por medio […]
Optimización de la geometría dependiente de la conectividad para renderización en tiempo real, del 24 de Diciembre de 2014, de LEGO A/S: Un método implementado por ordenador para visualizar/renderizar un modelo por ordenador, comprendiendo el modelo por ordenador una multitud de […]
PROCEDIMIENTO DE GENERACIÓN DE UN RECORRIDO PARA UNA BRONCOSCOPIA VIRTUAL, del 21 de Noviembre de 2013, de UNIVERSITAT POLITECNICA DE CATALUNYA: Procedimiento de generación de un recorrido para una broncoscopia virtual, que comprende generar un modelo de un árbol traqueo-bronquial y un modelo de un broncoscopio. […]
Procedimiento y sistema de predicción preoperatoria, del 20 de Marzo de 2012, de MEDICIM N.V.: Procedimiento para obtener de manera preoperatoria una predicción de una imagen postoperatoria de por lo menos parte de un cuerpo, que comprende las etapas de:
- […]
PROCEDIMIENTO DE CREACIÓN DE MODELOS FACIALES 3D A PARTIR DE IMÁGENES FACIALES, del 18 de Octubre de 2011, de TELECOM ITALIA S.P.A.: Procedimiento de creación de un modelo 3D (M) empezando a partir de una pluralidad de imágenes (I), que comprende las etapas de: - proporcionar dicha pluralidad […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Método de producción estereolitográfica y de diseño gráfico informatizado de un objeto tridimensional mejorado, del 20 de Enero de 2016, de Dws S.R.L: Método de producción de un objeto tridimensional que comprende una pluralidad de soportes que están conectados al cuerpo de dicho objeto por medio […]
Método de producción estereolitográfica y de diseño gráfico informatizado de un objeto tridimensional mejorado, del 20 de Enero de 2016, de Dws S.R.L: Método de producción de un objeto tridimensional que comprende una pluralidad de soportes que están conectados al cuerpo de dicho objeto por medio […] Optimización de la geometría dependiente de la conectividad para renderización en tiempo real, del 24 de Diciembre de 2014, de LEGO A/S: Un método implementado por ordenador para visualizar/renderizar un modelo por ordenador, comprendiendo el modelo por ordenador una multitud de […]
Optimización de la geometría dependiente de la conectividad para renderización en tiempo real, del 24 de Diciembre de 2014, de LEGO A/S: Un método implementado por ordenador para visualizar/renderizar un modelo por ordenador, comprendiendo el modelo por ordenador una multitud de […] Procedimiento y sistema de predicción preoperatoria, del 20 de Marzo de 2012, de MEDICIM N.V.: Procedimiento para obtener de manera preoperatoria una predicción de una imagen postoperatoria de por lo menos parte de un cuerpo, que comprende las etapas de:
- […]
Procedimiento y sistema de predicción preoperatoria, del 20 de Marzo de 2012, de MEDICIM N.V.: Procedimiento para obtener de manera preoperatoria una predicción de una imagen postoperatoria de por lo menos parte de un cuerpo, que comprende las etapas de:
- […]